基于圖像二值化的動(dòng)態(tài)干涉條紋研究
2012-07-05 05:31:54劉先章夏士明黃雁華
物理與工程 2012年6期
關(guān)鍵詞:測(cè)量
劉先章 夏士明 黃雁華
(中國(guó)人民解放軍理工大學(xué),江蘇 南京 210007)
1 引言
在很多領(lǐng)域,人們需要進(jìn)行微小尺度變化的測(cè)量.通過(guò)大學(xué)物理課程的學(xué)習(xí)我們知道,光的干涉法是測(cè)量微小尺度變化的有效方法[1,2].邁克爾孫干涉儀是比較典型的測(cè)量?jī)x器,由于設(shè)計(jì)精巧、用途廣泛,根據(jù)它的工作原理研制出了多種干涉儀,在近代物理和近代計(jì)量技術(shù)中被廣泛應(yīng)用[3,4].但在測(cè)量的時(shí)候,需要通過(guò)人眼判斷并計(jì)數(shù)移動(dòng)的條紋個(gè)數(shù),費(fèi)時(shí)費(fèi)勁,而且當(dāng)條紋移動(dòng)更快一點(diǎn)時(shí),人眼就不能分清條紋個(gè)數(shù)了,對(duì)于弱振等引起的快速動(dòng)態(tài)移動(dòng)條紋的測(cè)量,采用傳統(tǒng)方法對(duì)條紋計(jì)數(shù)顯得更加困難.
數(shù)字圖像處理技術(shù)以其容易實(shí)現(xiàn)、形象直觀、靈活等優(yōu)點(diǎn)已經(jīng)廣泛應(yīng)用在圖像識(shí)別與動(dòng)態(tài)處理中,我們?cè)O(shè)想可以把動(dòng)態(tài)條紋的采集與計(jì)數(shù)交給計(jì)算機(jī),再利用圖像處理方法進(jìn)行求解.本課題利用邁克爾孫干涉儀原理進(jìn)行了光路設(shè)計(jì),采用Matlab軟件,基于圖像二值化處理技術(shù)[5],把動(dòng)態(tài)干涉條紋圖變成動(dòng)態(tài)二值化圖,對(duì)單向微位移的動(dòng)態(tài)干涉條紋進(jìn)行計(jì)數(shù)研究,得到了一些有意義的結(jié)論.
2 基本原理
2.1 邁克耳孫干涉儀原理
邁克爾孫干涉儀是1883年美國(guó)物理學(xué)家邁克爾孫和莫雷合作,為了研究以太漂移實(shí)驗(yàn)而設(shè)計(jì)的一種精密光學(xué)儀器.在物理量測(cè)量及檢測(cè)成像等方面有廣泛應(yīng)用,如:測(cè)量鈉黃光波長(zhǎng)及鈉黃光雙線的波長(zhǎng)差、測(cè)量光波的相干長(zhǎng)度、測(cè)量氣體和固體的折射率[6]等.如圖1,在邁克耳孫干涉儀中,有兩片精密磨光的平面反射鏡 M1和 M2.M1固定,M2可前后移動(dòng),G1,G2是兩塊相同的平行玻璃板,G1的一個(gè)表面涂有半透明的薄層銀,呈半透明,G2為相位補(bǔ)償板,G1,G2與 M1,M2成45°放置,M′1為 M1經(jīng)薄層銀面成的像,若 M1,M2嚴(yán)格垂直,則M′1、M2嚴(yán)格平行.從激光光源發(fā)出的光,一路透過(guò)G1和G2,經(jīng)M1反射后再透過(guò)G2,經(jīng)G1的薄層銀面反射形成光束1;另一路經(jīng)G1的薄層銀面反射,再經(jīng)M2反射后透過(guò)G1,形成光束2.兩束光1、2是相干的,在E處可觀察到干涉條紋.
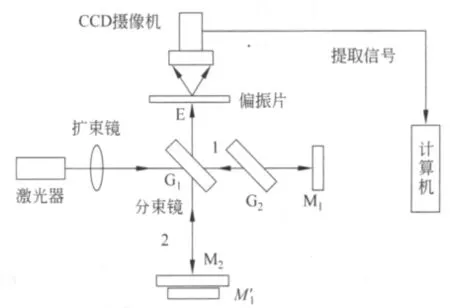
圖1 基于邁克爾孫干涉儀的光路設(shè)計(jì)圖
M1,M2嚴(yán)格垂直時(shí),M′1、M2嚴(yán)格平行,相當(dāng)于在M′1和M2之間形成厚度均勻的空氣膜,因此可觀察到等傾干涉.如圖2上排圖是M2不斷接近M′1并越過(guò)M′1過(guò)程產(chǎn)生的干涉圖.
當(dāng) M1,M2不嚴(yán)格垂直時(shí),M′1、M2不嚴(yán)格平行,相當(dāng)于在M′1和M2之間形成厚度不均勻的劈形空氣膜,因此可觀察到等厚干涉.如圖2下排圖是M′1和 M2之間有微小交角變化產(chǎn)生的各干涉圖.
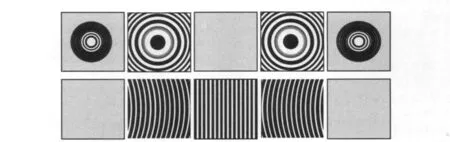
圖2 兩個(gè)反射鏡在相對(duì)位置不同時(shí)產(chǎn)生的各種干涉條紋
2.2 光路設(shè)計(jì)
利用邁克爾孫干涉儀原理進(jìn)行光路設(shè)計(jì),并采用CCD采集微位移的動(dòng)態(tài)干涉條紋,為數(shù)字圖像處理做準(zhǔn)備.圖3是基于邁克爾孫干涉儀的光路設(shè)計(jì)圖.光源采用He-Ne激光器作為光源,該型號(hào)激光器具有很好的單色性,波長(zhǎng)為632.8nm,功率約1.5mW.光屏幕前放置了420線陣CCD攝像機(jī),并在其前面放置偏振片以調(diào)節(jié)亮度,以防損壞CCD攝像機(jī).
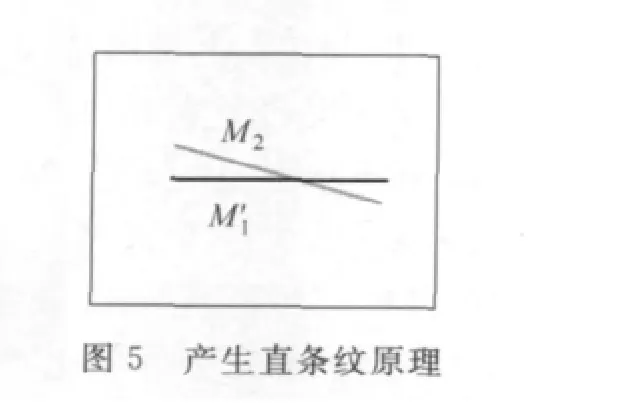
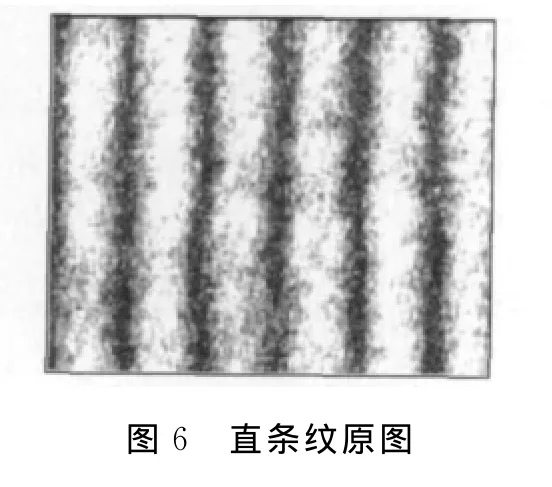
為了便于計(jì)算機(jī)圖像計(jì)數(shù)處理,我們利用圖2下排的第三個(gè)圖,其形成原理如圖5所示,當(dāng)M′1和M2之間形成厚度不均勻的對(duì)角劈形空氣膜時(shí),邁克爾孫干涉圖樣形成圖2下排的第三個(gè)圖.移動(dòng)反射鏡M2,就能看到干涉直條紋不斷地左移或右移.當(dāng)M2平移λ/2距離時(shí),光線1、2之間的光程差就增加或減小λ,在觀察鏡中看到一個(gè)條紋移過(guò)視場(chǎng).數(shù)出視場(chǎng)中明條紋移動(dòng)的數(shù)目N(本文中N可以是分?jǐn)?shù)),就可以計(jì)算出 M2移動(dòng)的距離,從而求得單向微位移結(jié)果

2.3 圖像二值化處理干涉條紋
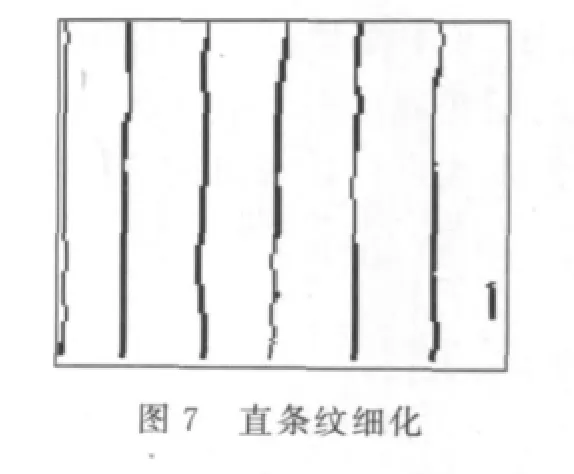
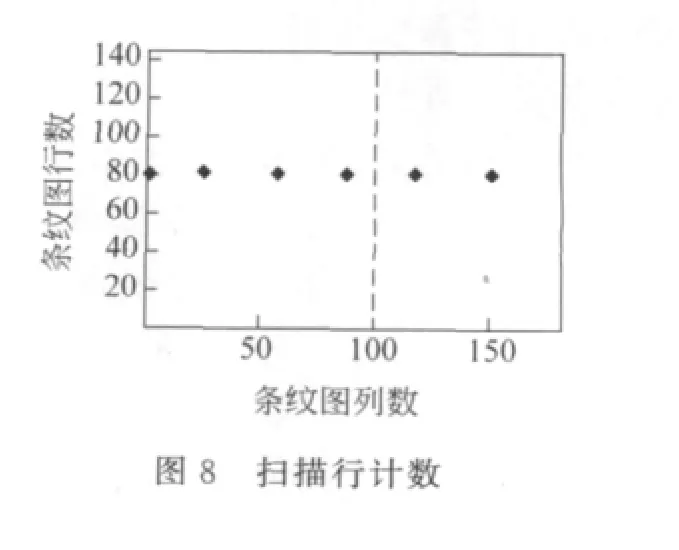
處理過(guò)程主要包括二值化條紋圖,形態(tài)學(xué)處理,高斯濾波和條紋細(xì)化等四個(gè)步驟.二值化是把條紋圖轉(zhuǎn)化為只有黑、白二值的圖像,它沒(méi)有呈現(xiàn)出灰度的變化;形態(tài)學(xué)處理主要是腐蝕和膨脹操作,用來(lái)填補(bǔ)暗紋中的空洞;高斯濾波用來(lái)消除條紋邊緣的毛刺;條紋細(xì)化用來(lái)標(biāo)記條紋的中心位置.如圖7是上述四個(gè)步驟的結(jié)果.圖8是對(duì)掃描行進(jìn)行計(jì)數(shù),在基準(zhǔn)線(虛線)處統(tǒng)計(jì)移動(dòng)的條紋數(shù).
3 動(dòng)態(tài)干涉條紋測(cè)量過(guò)程
3.1 總體思路
我們首先進(jìn)行單向動(dòng)態(tài)條紋研究.測(cè)量沿單向位置微小變化的物體,把測(cè)量對(duì)象放置在圖1所示的測(cè)量系統(tǒng)上.當(dāng)CCD攝像機(jī)采集了當(dāng)前的動(dòng)態(tài)條紋后,測(cè)量程序進(jìn)行了實(shí)時(shí)動(dòng)態(tài)條紋計(jì)數(shù),精確到了分?jǐn)?shù)個(gè)條紋,并輸出結(jié)果,最后計(jì)算出單向移動(dòng)的距離,測(cè)量系統(tǒng)總體思路如圖9所示.

圖9 總體思路圖
3.2 測(cè)量系統(tǒng)實(shí)現(xiàn)步驟
(1)把平臺(tái)擺放好,并調(diào)平.各個(gè)實(shí)驗(yàn)儀器的位置參看圖1,先把各個(gè)儀器的中心高度調(diào)至共軸,圖1為依據(jù)本設(shè)計(jì)原理制作的測(cè)量主要光路圖,平面反射鏡到分光鏡的距離和另一個(gè)可以連接被測(cè)物體平面反射鏡到分光鏡的距離相同.
(2)使激光器發(fā)出的光束平行于工作平臺(tái)的工作面.分別放入擴(kuò)束鏡和準(zhǔn)直鏡,調(diào)節(jié)準(zhǔn)直鏡,使通過(guò)它的被擴(kuò)束的激光變成平行光,平行光束應(yīng)通過(guò)放入光路中的部件(分光鏡、反光鏡等)的中心且平行于平臺(tái).
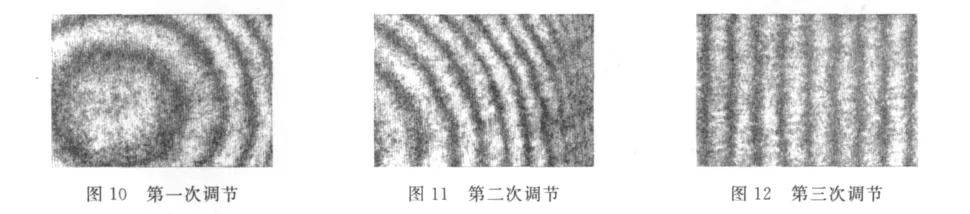
(3)CCD攝像機(jī)前放入偏振片以調(diào)節(jié)亮度,以防止損壞CCD攝像機(jī).調(diào)節(jié)分光鏡上二維調(diào)整臺(tái)的微調(diào)旋扭,使被反光鏡反射的兩束光的中心照射到CCD攝像機(jī)接收表面上.這時(shí)便可以在采集圖像的軟件上看到干涉條紋.最后再放入聚焦透鏡,調(diào)節(jié)透鏡與CCD的距離,使屏幕上得到最清晰、最完整的像.如圖10、圖11、圖12是分別從圓形干涉條紋調(diào)節(jié)到直條紋的實(shí)際過(guò)程圖.
3.3 測(cè)量程序?qū)崿F(xiàn)過(guò)程
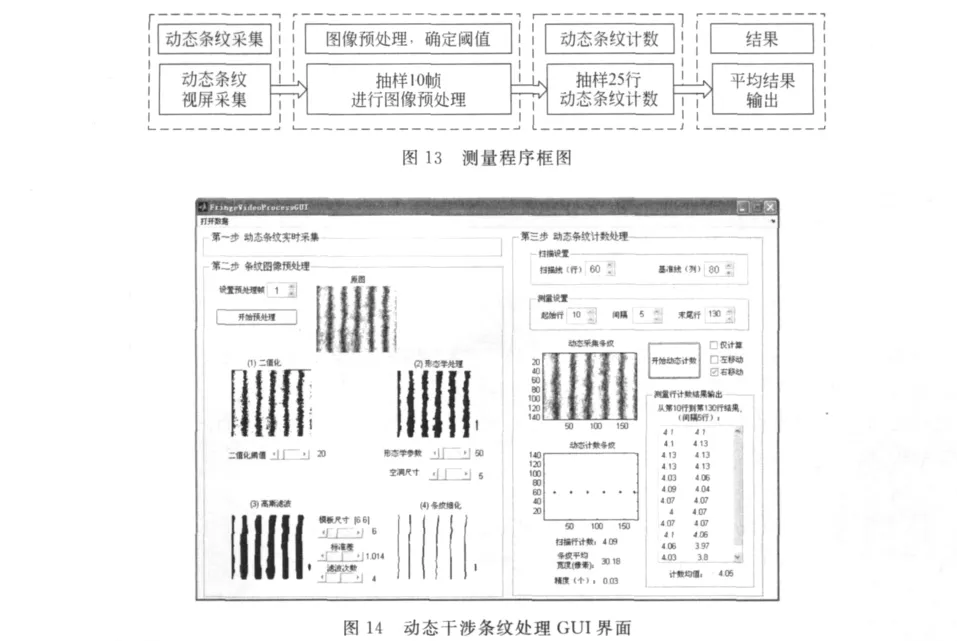
測(cè)量程序?qū)崿F(xiàn)過(guò)程是本課題研究的核心,主要分以下四個(gè)步驟:(1)動(dòng)態(tài)條紋采集;(2)圖像預(yù)處理,確定閾值;(3)動(dòng)態(tài)條紋計(jì)數(shù);(4)輸出計(jì)數(shù)結(jié)果.測(cè)量程序框圖如圖13,程序界面如圖14.圖像預(yù)處理是為了確定閾值,使各幀圖能準(zhǔn)確地轉(zhuǎn)化為條紋細(xì)化圖(如圖7),進(jìn)行下一步的動(dòng)態(tài)條紋計(jì)數(shù),最終得到較準(zhǔn)確的結(jié)果.
1)動(dòng)態(tài)條紋采集
按照?qǐng)D1設(shè)計(jì)的光路,把被測(cè)量對(duì)象放在M2上,并單向微移動(dòng),CCD攝像機(jī)實(shí)時(shí)采集動(dòng)態(tài)干涉條紋,輸入到動(dòng)態(tài)干涉條紋處理GUI界面,如圖14.
2)圖像預(yù)處理,確定閾值
隨機(jī)抽樣10幀進(jìn)行圖像處理,若全部二值化結(jié)果理想,則可確定5個(gè)閾值參數(shù).圖14對(duì)某次單向微振動(dòng)進(jìn)行了測(cè)試,采集之后進(jìn)行了圖像預(yù)處理,采用下面三個(gè)自編的子程序?qū)Τ闃訋瑘D進(jìn)行了圖像預(yù)處理測(cè)試,測(cè)試方法和結(jié)果如圖15.
TempImageBW=BW(TempImage,Tbw);
TempImageBWB=bwareaopen(TempImageBW,
bwareaopenT);
TempImageBWC=imclose(bwmorph(TempImageB
WB,'close'),nhood);
Imagegauss=GaussImage(TempImageBWC,Argu - mentMatix,Argument,N)

圖15 確定閾值的步驟
確定閾值參數(shù)如圖14,抽樣當(dāng)前動(dòng)態(tài)條紋的第一幀圖,得二值化圖像參數(shù)Tbw=20,形態(tài)學(xué)操作參數(shù)bwareaopenT=50,空洞尺寸nhood為5,高斯濾波矩陣ArgumentMatix、閾值A(chǔ)rgument、高斯濾波次數(shù)N分別為6,1.014,4.
3)動(dòng)態(tài)條紋計(jì)數(shù)
掃描設(shè)置:條紋圖的第60行二值化結(jié)果見(jiàn)圖15的最后一個(gè)圖,并設(shè)置基準(zhǔn)線為80列,即就好像人眼一直盯著第80列看條紋從起始到結(jié)束移動(dòng)的個(gè)數(shù).
測(cè)量設(shè)置:利用上面得到的參數(shù),并設(shè)置要測(cè)試的動(dòng)態(tài)條紋圖的行對(duì)象,程序中起始行為第10行,間隔5行到第130行共25個(gè)抽樣行,并求出各行的條紋移動(dòng)個(gè)數(shù).程序計(jì)算思路如圖16.

圖16 動(dòng)態(tài)條紋計(jì)數(shù)程序思路圖
4)輸出計(jì)數(shù)結(jié)果
點(diǎn)擊開(kāi)始測(cè)試按鈕后,開(kāi)始對(duì)上面設(shè)置的參數(shù)進(jìn)行處理.開(kāi)始的時(shí)候,程序在后臺(tái)計(jì)算各幀的初始數(shù)據(jù),然后再進(jìn)行動(dòng)態(tài)條紋掃描并計(jì)數(shù).計(jì)算結(jié)果如圖15,精確到了分?jǐn)?shù)位,最后對(duì)25抽樣行進(jìn)行求均值得4.05個(gè).
同樣地,我們對(duì)移動(dòng)速度不同的測(cè)量對(duì)象進(jìn)行了相同方法的測(cè)試,得到如圖17的結(jié)果.
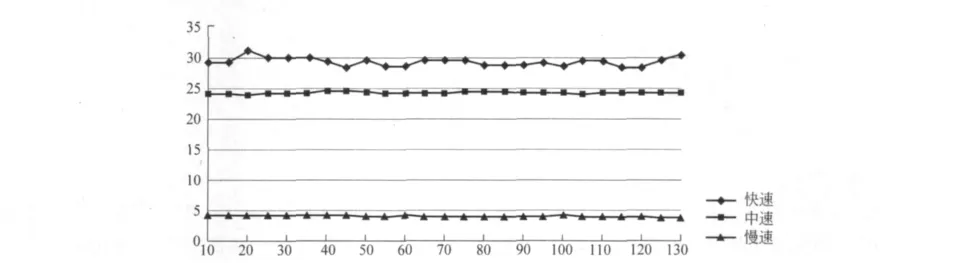
圖17 不同移動(dòng)速度的測(cè)量結(jié)果
由圖17看出,由于計(jì)算機(jī)處理速度和程序的缺陷,當(dāng)條紋移動(dòng)速度較快時(shí),難以控制其穩(wěn)定性,存在較大誤差;當(dāng)均勻移動(dòng)條紋或移動(dòng)速度較慢時(shí),誤差較小,精度較高.本課題采用激光波長(zhǎng)為632.8nm,利用式(1),計(jì)算得到測(cè)量結(jié)果,如表1所示.
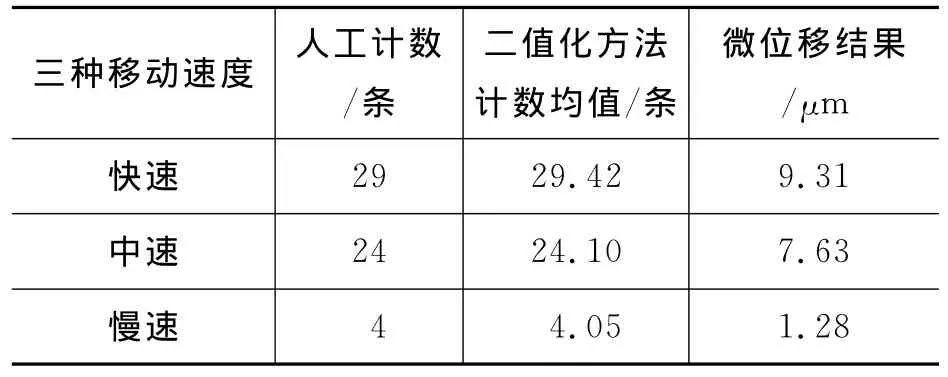
表1 不同移動(dòng)速度的條紋計(jì)數(shù)結(jié)果對(duì)比
由表1可以看出,利用計(jì)算機(jī)可以較容易地計(jì)數(shù)到0.03個(gè)條紋,測(cè)量精度可達(dá)0.01μm.
4 誤差分析
通過(guò)圖像處理分析動(dòng)態(tài)干涉條紋,雖然提高了測(cè)量精度,但我們的工作也存在一定誤差,分析如下:
(1)機(jī)械移動(dòng)誤差,用手調(diào)節(jié)微調(diào)旋鈕的過(guò)程中,很難保證條紋的移動(dòng)與手動(dòng)調(diào)節(jié)是一致的;
(2)圖像初始化誤差,在設(shè)置閾值時(shí),參數(shù)選得不恰當(dāng),會(huì)給后面的計(jì)數(shù)帶來(lái)誤差;
(3)二值化誤差,在對(duì)圖像進(jìn)行濾波、細(xì)化等處理的過(guò)程中,閾值的選擇都會(huì)對(duì)后面的抽樣二值化圖產(chǎn)生影響;
(4)數(shù)據(jù)處理誤差,數(shù)據(jù)的選取要具有代表性,盡量選擇誤差較小的處理數(shù)據(jù)的方法.
5 課題結(jié)論與展望
在本課題研究中,經(jīng)歷了資料搜集、文獻(xiàn)閱讀、光路調(diào)節(jié)、實(shí)物改進(jìn)、單向微振動(dòng)的選取和CCD視頻拍攝、軟件編寫、圖像處理和數(shù)據(jù)分析等多個(gè)環(huán)節(jié).課題研究期間遇到了一系列的問(wèn)題,如(1)光路調(diào)節(jié)時(shí)產(chǎn)生的干擾光線以及圖像不合要求等;(2)實(shí)物制作時(shí)材料的選取,既要達(dá)到良好的固定效果,又要有一定的防震作用,既要方便光路的調(diào)節(jié),又要滿足較高的精度等苛刻條件;(3)在實(shí)驗(yàn)過(guò)程當(dāng)中,發(fā)現(xiàn)移動(dòng)速度較快的對(duì)象,難以控制,以后將進(jìn)一步改進(jìn)程序,為進(jìn)行更加復(fù)雜的研究打下基礎(chǔ).
1)主要結(jié)論
課題組在邁克爾孫干涉儀原理的基礎(chǔ)上,自制了光路實(shí)物,并進(jìn)行了光路設(shè)計(jì),基于圖像二值化處理技術(shù),采用Matlab編程,制作了動(dòng)態(tài)干涉條紋處理GUI界面,對(duì)CCD采集的單向微位移動(dòng)態(tài)干涉條紋,進(jìn)行了精確到0.03個(gè)條紋的計(jì)數(shù)研究,對(duì)于中速或者慢速移動(dòng)條紋得到了較好的結(jié)果,以后應(yīng)該優(yōu)化程序,使其能處理快速雙向的條紋變化.
2)創(chuàng)新點(diǎn)
(1)采用圖像二值化方法,設(shè)計(jì)了交互式的動(dòng)態(tài)條紋計(jì)數(shù)GUI界面,可以形象直觀地顯示條紋變化的過(guò)程和動(dòng)態(tài)計(jì)數(shù)的細(xì)節(jié),提供了一種可視化的條紋計(jì)數(shù)方法.
(2)可代替人工進(jìn)行移動(dòng)速度為人眼可視的條紋計(jì)數(shù),精度可達(dá)0.03個(gè)條紋,課題結(jié)論對(duì)進(jìn)一步研究移動(dòng)速度較快的條紋計(jì)數(shù)等問(wèn)題具有積極的意義.
3)展望
課題對(duì)單向微位移的動(dòng)態(tài)條紋計(jì)數(shù)進(jìn)行了研究,并得到了很好的結(jié)果,隨著工作進(jìn)一步展開(kāi),我們覺(jué)得以本課題為基礎(chǔ),可以進(jìn)一步研究:(1)對(duì)程序進(jìn)行優(yōu)化,使其能夠處理雙向移動(dòng)的條紋信息,進(jìn)而拓展研究范疇;(2)在雙向弱振研究基礎(chǔ)上,可研究激光監(jiān)聽(tīng),從光干涉角度來(lái)獲取語(yǔ)音信息;(3)研究微小振動(dòng)形式及其變化,將其用于基于光路信息的加密,對(duì)信息安全有重要研究意義.
[1]趙凱華,鐘錫華.光學(xué)(上冊(cè))[M].北京:北京大學(xué)出版社,1984
[2]沈元華.設(shè)計(jì)性研究性物理實(shí)驗(yàn)教程[M].上海:復(fù)旦大學(xué)出版社
[3]石朝陽(yáng),鄧燕輝.邁克爾孫干涉儀讀數(shù)系統(tǒng)的改進(jìn)[J].物理與工程,2008,18(4):37~39
[4]陳鵬,蔣逢春,商繼敏.對(duì)邁克爾孫干涉圖樣的分析[J].新鄉(xiāng)師范高等專科學(xué)校學(xué)報(bào),2006,20(3):12~13
[5]吳玲玲,吳國(guó)俊,倉(cāng)玉萍等.基于Talbot-Moiré法測(cè)量透鏡焦距的莫爾條紋的圖像處理[J].光子學(xué)報(bào),2010,39(9):1723~1727
[6]魏茂金,張朝清,黃思俞.邁克耳孫干涉儀測(cè)量介質(zhì)板折射率的問(wèn)題研究[J].物理實(shí)驗(yàn),2010,30(6):28~31
猜你喜歡
小學(xué)科學(xué)(學(xué)生版)(2021年5期)2021-07-22 02:40:06
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
軍事文摘·科學(xué)少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學(xué)少年(2017年2期)2017-04-26 21:58:43
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學(xué)低年級(jí)版)(2015年4期)2015-04-29 00:00:00
