新型有軌電車信號系統方案研究
2012-07-05 02:58:16劉新平
城市軌道交通研究 2012年5期
劉新平
(中鐵第四勘察設計院集團有限公司,430063,武漢∥高級工程師)
19世紀末期,有軌電車技術日趨成熟,美國、英國、法國、日本等國家的很多城市相繼建成了有軌電車。隨著第二次世界大戰的爆發,各參戰國的有軌電車系統均受到嚴重的破壞。與此同時,汽車工業迅猛發展,有軌電車的發展則日漸衰退,世界各大城市的有軌電車紛紛停運或被拆除。如今城市化進程的加快和家用汽車的普及,使得城市交通不堪重負;雖然交通工具更加豐富,但人們的出行卻更加不便,行車緩慢、交通堵塞隨處可見,日趨嚴重的全球能源危機和大氣污染問題也隨之而來。雖然很多大型城市建設了城市軌道交通,希望借此來緩解交通壓力,并減少城市中汽車尾氣的排放量,但由于地下鐵道和高架輕軌的巨額投資,反而使許多城市陷入深深的債務危機。因此,高效、廉價、無污染的有軌電車再一次走上了歷史舞臺,人們開始重新評價有軌電車在城市交通中的作用[1]。
信號系統是軌道交通的安全保障,它關系著每位乘客的生命安全;同時信號系統也是運營效率的保障,使得列車在安全運行的前提下實現線路的最大運能[2]。隨著有軌電車的回歸,一套與之相適應的信號系統也呼之欲出。從工程實用的角度來看,如何有效地配置信號系統以滿足新型有軌電車運營的需求,成為了一個亟待探討的問題。
1 新型有軌電車特點
現代新型有軌電車一般具有以下特性:①有軌電車的車輛定距較小,普遍采用關節鉸接裝置,線路的曲線半徑最小可以在20m以下;②有軌電車線路的站間距小,平均站間距小于1km;③有軌電車的機械、電氣設備小型化和輕量化;④有軌電車最大運行速度可在70~80km/h,車輛自重輕,單位車體長度的自重在1.5t/m左右,車輛牽引加速度在1.0~1.3m/s2,車輛常用制動減速度為1.0~1.5 m/s2,緊急制動減速度在2.5~3.5m/s2。
有軌電車的車輛運行在鋼軌上,其路權直接影響有軌電車運行的效率和安全,并決定著有軌電車的運行模式、控制模式。根據美國運輸研究學會的建議,可將軌道交通系統的路權劃分3種形式9種類別[6](見表1)。
輕軌、地鐵系統廣泛采用A類路權,高峰時期運營間隔小于2min。對于有軌電車,其路權形式就比較多樣。為節省投資和運營成本,大多數有軌電車采用B或者C類路權;部分項目為了更大地發揮有軌電車的運輸效率和提高其運營安全性,也會采用A類路權。
現階段,我國大連、上海和香港等地運營的有軌電車都屬于C類路權,平交道口多,與機動車混行。在平交道口處采用自動控制的信號燈,道岔的扳動由司機無線遙控[3]。在這種運營模式下,不僅有軌電車運行速度受到限制,而且要完全依靠司機人工目視和較好的車輛制動能力來保障其基本的運營安全和順暢。平交道口多,會影響其他公共交通方式,易造成交通堵塞;依靠司機人工目視,易增加司機的疲勞度,特別是在夜間或者惡劣天氣下駕駛時,存在更大的安全隱患。
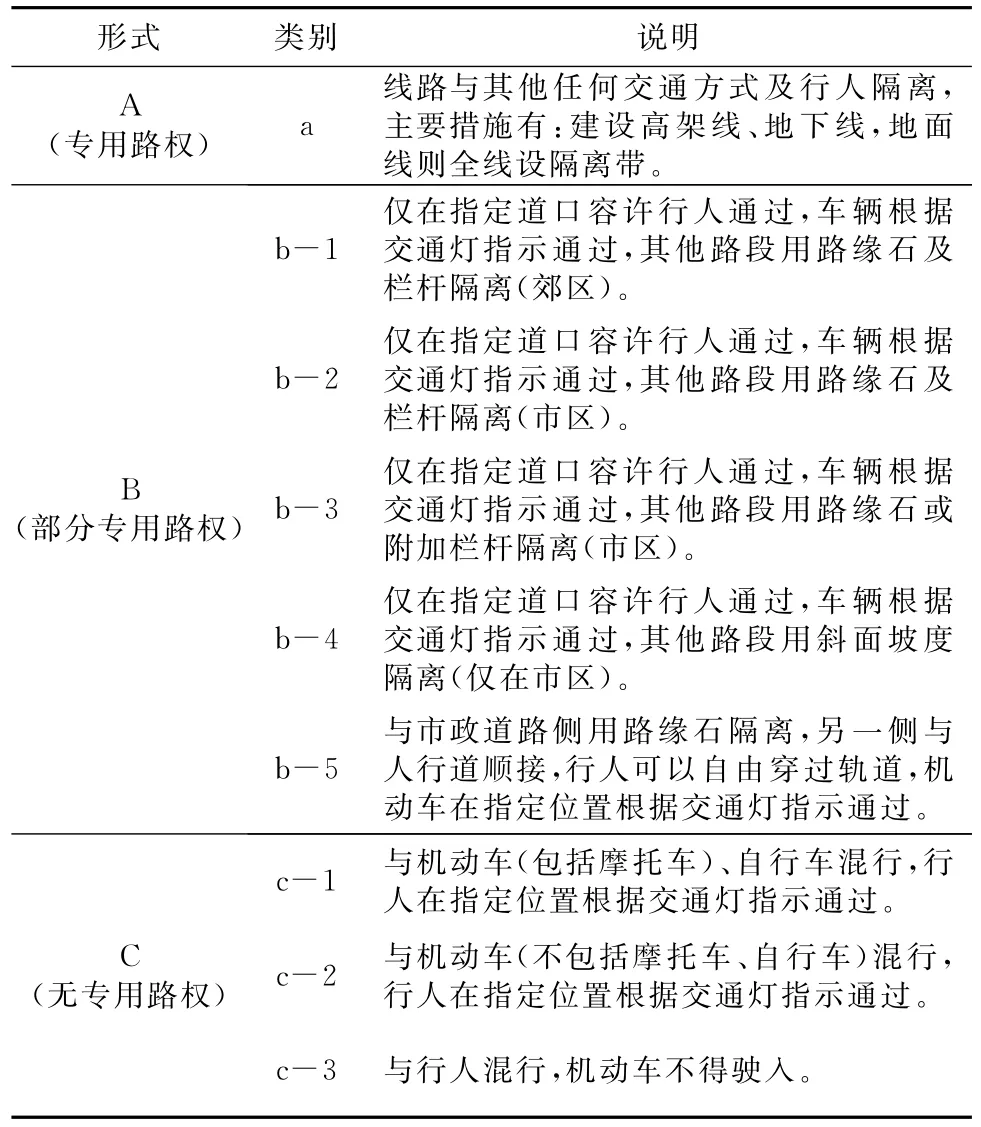
表1 軌道交通系統路權分類表
新近獲批的佛山市南海區新型有軌電車項目采用的路權就是封閉路權的,這樣既保障了運營的安全,同時也大大提高了運輸效率。
2 新型有軌電車行車安全控制方案
對于采用B類或C類路權的有軌電車,由于依靠司機人工目視駕駛,只需按照基本的交通規則運營即可,無需增設特殊的信號控制設備。而對于采用封閉路權的A類有軌電車,信號系統控制方案則需進行必要的分析和研究。
2.1 目視行車
如果采用封閉路權,有軌電車司機可以依靠目視行車,司機無需擔心其他社會車輛的突然介入。從安全的角度出發,該模式下的有軌電車要滿足以下要求:①有軌電車司機應具有豐富的駕駛經驗,對前方目標的距離及速度判斷準確;②有軌電車的最高速度必須限制在50km/h以下,以確保有軌電車能及時停車;③有軌電車的制動率要大,制動距離要求盡可能短(一般不大于25m)。
該模式下的有軌電車,其運行效率及安全完全由人工保證,安全性差,運行效率低,但在信號系統方面基本不需要投資。
2.2 閉塞行車
按照閉塞分區的分割方法,閉塞行車可以分為:站間閉塞、自動閉塞、移動閉塞等。如果采用閉塞行車,司機只需依據信號機的顯示或車載信號信息行車。該模式下的有軌電車要滿足以下要求:①有軌電車應有專屬路權,不能有其它交通方式的干擾;②軌旁必須有閉塞分割設備(軌道電路或者計軸設備等);③必須有用于指導有軌電車前行或者停止的信號顯示設備(信號燈或者車載信號顯示設備)。
在該模式下,有軌電車間的安全間隔由信號系統通過信號顯示或者移動授權來進行控制,以地面信號顯示或者車載設備信號顯示作為行車憑證,可以有效避免人為操作失誤導致的事故。該模式對有軌電車的制動率及制動距離等要求不高,有軌電車可以以較高的速度運行,運行效率高,但需要增加適當的建設信號系統的投資。
2.3 行車安全控制方案比較
在封閉路權的有軌電車系統中,當有軌電車在平坡道上處于最不利的運行情況下(司機反映時間3s,電車制動裝置響應時間2s)時,假設此時有軌電車的運行速度為70km/h,緊急減速度為2.5m/s2,那么從有軌電車制動裝置開始響應到停車,所需時間為7.8s,列車完全停穩的緊急制動距離為164m。如果采用目視行車方式控制行車安全間隔,為保證司機能及時發現前面的障礙物,司機的最低安全視距應在200~300m左右,在遇有下坡道、彎道、夜間、隧道內或者暴雨、大霧極端天氣等情況時,司機的最低安全視距離則需要大于400m。這顯然是做不到的。
鑒于上述分析,在保障運營效率的前提下,新型有軌電車的行車安全間隔控制方案應采用閉塞行車,這樣才能保證高密度行車下的運營安全。
3 新型有軌電車行車間隔控制方案
新型有軌電車的站間距小,在高峰期時列車密度較大,因此,必須采用適當的行車間隔控制方案來提高行車效率。而行車間隔與閉塞形式密切相關,閉塞形式決定了有軌電車的運行能力。
可以應用于新型有軌電車的閉塞方式有自動站間閉塞和自動閉塞兩種方式。自動站間閉塞方式的閉塞分區以站間為單位進行劃分,閉塞區段較少;自動閉塞是在站間閉塞無法滿足運營需求的情況下,通過在區間上增設信號點,增加閉塞區段。
3.1 保護區段的計算
在不考慮線路坡道及彎道限速等條件下,假設最大站間距為1 000m,有軌電車的長度為80m,有軌電車的常用加速度a1為1.0m/s2,減速度a2為1.5m/s2,緊急制動減速度a3為2.5m/s2,停站時間為25s,司機反應速度為3s,信號設備反映時間為2s。在實際運行過程中,有軌電車的最高運營速度一般控制在最高速的90%左右,即63km/h,在進入站臺端時限速運行為50km/h。
在正常運營過程中,列車的追蹤規則如圖1所示。

圖1 正常運營過程中列車追蹤規則示意圖
有軌電車追蹤運行時,前后兩列列車的安全間隔最少保持1個保護區段的距離。如圖1所示,只有當列車M 1出清1站臺外方信號機的保護區段后,后面的列車M2才允許進入兩站間運行,直至在前方站臺停車。設置保護區段的目的是為了防止后續列車誤闖紅燈而預留的保護距離,以確保列車在最不利情況下仍然不至于發生追尾事故。
由于有軌電車在站臺區域內行駛的最高速度v0為50km/h(因為有軌電車在進入站臺端時已經進行了限速),則有軌電車緊急制動所需時間t1=v0/a3=5.56s,在t1時間內,有軌電車減速運行距離為s1=a3(t2)2/2=38.64m;在信號設備獲知電車闖紅燈到緊急制動生效之前,系統需要的反應時間t2=2s,在t2時間內,有軌電車以50km/h速度運行距離為s2=27.78m。因此,整個保護區段的總長度s=s1+s2=66.42m(取70m)。
3.2 最小行車間隔
圖1中所示的列車M1正常加速出站,當列車尾部離開保護區段時,2站臺的出站信號機變成綠燈,列車M2可以駛向1站臺了。通過計算可知,當列車 M1加速到63km/h時,耗時t1=17.5s,行駛153m≈車長80m+保護區段70m。那么當經過t1秒之后,列車M2即可發車。列車M2的站間運行的速度曲線如圖2所示。

圖2 列車站間運行速度曲線圖
如圖2所示,列車M2在2站臺啟動,以a1加速度運行直至速度達到63km/h,此時加速耗時t2=17.5s,列車尾部走行的距離為L2=153.25m。
列車M2頭部進入站臺1的端部時,車速應從63km/h降低到50km/h,有軌電車的常用減速度為a2,減速持續時間為t4=2.4s,列車尾部走行距離為L4=46.32m。
列車M2在站臺1內運行,以a2減速度均勻減速,從50km/h降為0,所需時間t6=9.26s,列車尾部運行距離為L6=63.4m<80m(車長),那么列車M2在車頭進入站臺后,以勻速方式運行了一段時間t5,勻速運行的距離大約為L5=20m,可計算得到t5=1.44s。
列車M2在出發加速到63km/h后勻速運行,其運行的距離應為:L3=1 000m-L2-L4-L5-L6=735m,勻速運行持續時間t3=42s。
M2在到達1站臺后停車時間t7=25s后再次起動。
兩列列車相互追蹤的最短時間間隔為t1~t7之和,即為115s,小于2min。實際工程中有軌電車列車的站間距會更小,追蹤時間則會更短。
通過以上計算可知,站間閉塞方式已可以滿足有軌電車高密度的區間追蹤需求。理論上,雖然自動閉塞可以進一步減少有軌電車站間追蹤時間。但是追蹤時間的減少,必然伴隨的是列車數量的增加和信號設備投資的增長,如此一來,工程投資便會俱增。
在現實的運營管理過程中,列車的運營間隔還要考慮到站間距的長短、線路的坡道、彎道、限速等等因素,列車在區間運行的速度往往達不到最高運行速度,因此,按照站間閉塞方式運營時,列車的最小追蹤時間可能會略大于2min。然而對于城市建設有軌電車的目的以及有軌電車的工程規模和運能而言,2 min的行車間隔已足以滿足高峰時段的運輸需求。
4 結語
隨著城市化進程的加快,城市交通擁堵問題日漸凸顯,地鐵、輕軌雖然能緩解城市交通壓力,但是建造成本高昂。新型有軌電車憑借其造價低、換乘方便等優勢再次成為了軌道交通領域關注的熱點。信號系統是軌道交通的重要組成部分,鑒于新型有軌電車具有平均站間距小、發車密度大,但工程投資較少等特點,從投資的性價比方面考慮,站間閉塞行車控制方案是最為合理的。通過文中計算分析可知,信號系統采用站間閉塞方式即可滿足正常高峰時期的運營需求。
[1]唐淼,馬韻.現代有軌電車在城市區域內的適應性[J].上海交通大學學報,2011,45(S1):71.
[2]唐賈言.現代有軌電車的運營控制系統[J].自動化應用,2010(12):61.
[3]王力.新型有軌電車的信號系統[J].鐵道通信信號,2009,45(1):33.
[4]林瑜筠,李鵬,李岱峰,等.鐵路信號新技術概論[M].北京:中國鐵道出版社,2005.
[5]GB 50157—2003地鐵設計規范[S].
[6]王建.試論有軌電車與輕軌系統的相互關系[J].中國城市交通,2004,2(3):24.