一類(lèi)時(shí)滯系統(tǒng)的穩(wěn)定性分析及控制器設(shè)計(jì)
2012-07-05 14:28:19邱金學(xué)游成濤章春國(guó)
關(guān)鍵詞:系統(tǒng)設(shè)計(jì)
邱金學(xué),游成濤,章春國(guó)
(杭州電子科技大學(xué)數(shù)學(xué)系,浙江杭州 310018)
一類(lèi)時(shí)滯系統(tǒng)的穩(wěn)定性分析及控制器設(shè)計(jì)
邱金學(xué),游成濤,章春國(guó)
(杭州電子科技大學(xué)數(shù)學(xué)系,浙江杭州 310018)
研究一類(lèi)具有狀態(tài)時(shí)滯和輸入時(shí)滯的時(shí)變時(shí)滯線性系統(tǒng).首先,通過(guò)選取合適
的Lyapunov-K rasovskii泛函,應(yīng)用LMI方法和Lyapunov-K rasovskill穩(wěn)定性定理對(duì)
時(shí)滯相關(guān)的系統(tǒng)進(jìn)行穩(wěn)定性分析,并設(shè)計(jì)了相應(yīng)的控制器.改進(jìn)了時(shí)變時(shí)滯線性系統(tǒng)方面的一些結(jié)果.最后用實(shí)例驗(yàn)證所得到結(jié)果.
時(shí)滯系統(tǒng);Lyapunov-K rasovskii泛函;魯棒穩(wěn)定性;線性矩陣不等式(LMI);反饋控制
1 引言
在許多工程系統(tǒng)中,時(shí)滯往往是系統(tǒng)不穩(wěn)定和性能變差的主要根源之一,因此時(shí)滯系統(tǒng)的穩(wěn)定性分析和控制器的設(shè)計(jì)受到廣大學(xué)者的關(guān)注[17].基于Lyapunov穩(wěn)定性理論,采用LMI這一有效工具,學(xué)者們提供了時(shí)滯系統(tǒng)魯棒穩(wěn)定性分析和控制綜合的一些方法,并得到了許多有效結(jié)果.
本文是在文獻(xiàn)[8]的基礎(chǔ)上考慮具有時(shí)滯的控制輸入項(xiàng).一般情況下,時(shí)滯常常被視為系統(tǒng)不穩(wěn)定或系統(tǒng)性能變差的主要因素.因此在已有的時(shí)滯系統(tǒng)穩(wěn)定性研究結(jié)論中,這樣的系統(tǒng)不但考慮了狀態(tài)時(shí)滯,還考慮了控制輸入的時(shí)滯,且時(shí)滯是時(shí)變的,使得系統(tǒng)更具有一般性.同時(shí),所得到的結(jié)果推廣了文獻(xiàn)[8]的結(jié)果,所用的方法:不是直接利用New ton-Leibniz公式對(duì)時(shí)滯進(jìn)行替換,而是通過(guò)考慮New ton-Leibniz公式中各項(xiàng)的相互關(guān)系,引入若干自由權(quán)矩陣,進(jìn)而得到系統(tǒng)的時(shí)滯相關(guān)穩(wěn)定性條件.并討論具有狀態(tài)和輸入時(shí)滯的時(shí)變時(shí)滯系統(tǒng)的時(shí)滯相關(guān)鎮(zhèn)定問(wèn)題和控制器的設(shè)計(jì).
2 問(wèn)題描述
考慮如下具有狀態(tài)時(shí)滯和輸入時(shí)滯的標(biāo)稱(chēng)系統(tǒng):其中x(t)∈?n,u(t)∈?m和y(t)∈?p分別是系統(tǒng)(1)的狀態(tài)向量、控制輸入向量和測(cè)量輸出向量,A,B,C,Ad和Bd是已知具有適當(dāng)維數(shù)的實(shí)常矩陣.狀態(tài)和控制輸入具有相同的時(shí)滯h(t),而h(t)是一個(gè)時(shí)變的連續(xù)可微函數(shù),并滿足:


3 不含控制的標(biāo)稱(chēng)系統(tǒng)穩(wěn)定性分析
如果系統(tǒng)(1)不含控制輸入變量u(t),即?t∈?,有u(t)≡0,那么系統(tǒng)(1)可轉(zhuǎn)化為:

在本節(jié)中,對(duì)時(shí)滯項(xiàng)h(t)的處理,不直接利用New ton-Leibniz公式對(duì)h(t)進(jìn)行替換,而是通過(guò)考慮New ton-Leibniz公式中各項(xiàng)的相互關(guān)系,引入若干自由權(quán)矩陣,進(jìn)而得到系統(tǒng)(3)的時(shí)滯相關(guān)穩(wěn)定性條件.
接下來(lái)介紹本節(jié)的主要結(jié)果如下:
引理1(Schur補(bǔ)性質(zhì)[9])對(duì)于給定的對(duì)稱(chēng)陣:


以及矩陣Si,Ti,i=1,…,4,使得如下LMI成立:

則滿足時(shí)滯約束(2)的標(biāo)稱(chēng)系統(tǒng)(3)是漸近穩(wěn)定的.其中


由Zi>0,i=1,2可知,(9)式中最后兩部分均小于零,要想使˙V(t,xt)<0,必須有Ξ<0成立.
如果Ξ<0,那么總是存在充分小的ε,有˙V(t,xt)<-ε‖x(t)‖2,由Lyapunov-K rasovskill穩(wěn)定性定理可知,系統(tǒng)(3)是漸近穩(wěn)定的.因此,如果條件滿足(4)式,系統(tǒng)(3)是漸近穩(wěn)定的.
4 含控制的標(biāo)稱(chēng)系統(tǒng)的鎮(zhèn)定分析和控制器設(shè)計(jì)
4.1 狀態(tài)反饋控制器設(shè)計(jì)
假設(shè)系統(tǒng)(1)的狀態(tài)x(t)是可以直接測(cè)量得到的,要求設(shè)計(jì)一個(gè)無(wú)記憶狀態(tài)反饋控制器

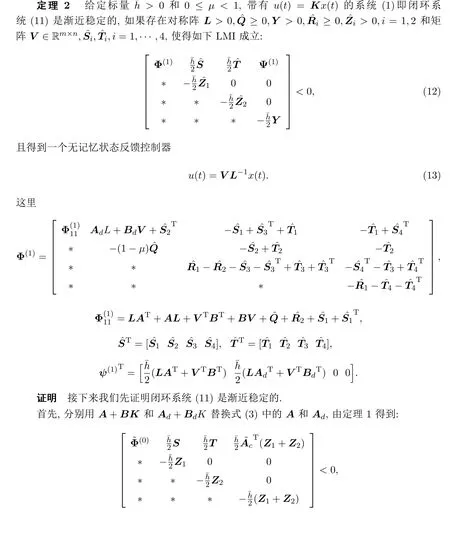
把(10)式代入系統(tǒng)(1)中,得到系統(tǒng)(1)相應(yīng)的閉環(huán)系統(tǒng)如下:

在定理1的基礎(chǔ)上,可以得到如下結(jié)果:

4.2 輸出反饋控制器設(shè)計(jì)
一般來(lái)說(shuō),系統(tǒng)的狀態(tài)并不能直接測(cè)量得到的,而能測(cè)量的是輸出量.因此,這一小節(jié)將研究輸出反饋控制器設(shè)計(jì)問(wèn)題.
系統(tǒng)(1)的狀態(tài)x(t)是不能直接測(cè)量得到的,要求設(shè)計(jì)一個(gè)靜態(tài)輸出反饋控制器

對(duì)于形如(14)式的靜態(tài)輸出反饋控制器,把(14)式代入系統(tǒng)(1)得到相應(yīng)的閉環(huán)系統(tǒng)如下:

在定理1的基礎(chǔ)上,得到如下結(jié)果:



假設(shè)存在一個(gè)矩陣H∈?p×p,使得(17)式成立,再令U:=GH,就可得到(16)式,且有G:=UH-1,于是得到一類(lèi)靜態(tài)輸出反饋控制器u(t)=UH-1y(t).由定理1可知,在這類(lèi)反饋控制器的作用下,滿足條件(16)、(17)的系統(tǒng)(1)是漸近穩(wěn)定的.
5 數(shù)值實(shí)例
考慮形如系統(tǒng)(1)的時(shí)滯系統(tǒng),并設(shè)以下參數(shù)

由定理2和Matlab軟件的LMI工具箱中的求解器feasp,可知滿足條件(20)的系統(tǒng)(1)是時(shí)滯無(wú)關(guān)可鎮(zhèn)定的.亦即,系統(tǒng)對(duì)于滿足0≤<+∞的所有都是可鎮(zhèn)定的.與文獻(xiàn)[5]相比,考慮到控制器有時(shí)滯的情況且時(shí)滯是時(shí)變的,更具有一般性.這里如果令Bd=0和μ=0,則即為文獻(xiàn)[5]中所描述的系統(tǒng).


進(jìn)而求得K=[-1.3882-0.1289],滿足參數(shù)條件(20)的系統(tǒng)(1)的控制器設(shè)計(jì)為:u(t)=-[1.3882 0.1289]·x(t).
如果在系統(tǒng)(1)中取一些零值(譬如μ=0或Bd=0),就能得到其它特殊情況.
情形1當(dāng)t>0時(shí),如果系統(tǒng)的狀態(tài)變量x(t)是可以測(cè)量得到的.類(lèi)似地,對(duì)定理2中的LMI條件(12)求解,得出系統(tǒng)的狀態(tài)反饋增益K=[-1.3941-0.1270]即得到系統(tǒng)的一個(gè)無(wú)記憶狀態(tài)反饋控制器u(t)=-[1.3941 0.1270]·x(t).

從圖1可以得出結(jié)論:當(dāng)ˉh=1.0,μ=0時(shí),形如(1)的常時(shí)滯系統(tǒng)在t=4.5s時(shí),系統(tǒng)處于穩(wěn)定狀態(tài),在以后的時(shí)間里將保持這個(gè)狀態(tài)不變.這說(shuō)明在定理2的結(jié)果下,具有狀態(tài)時(shí)滯和控制輸入時(shí)滯的常時(shí)滯系統(tǒng)是可以在一定時(shí)間內(nèi)達(dá)到穩(wěn)定狀態(tài)的.
情形2當(dāng)t>0時(shí),如果系統(tǒng)的狀態(tài)變量x(t)是不能直接測(cè)量得到的,要在系統(tǒng)中加入測(cè)量輸出變量y(t).類(lèi)似地,應(yīng)用定理3的控制器的設(shè)計(jì)方法,得到系統(tǒng)的一個(gè)靜態(tài)輸出反饋增益G=-1.3628.于是得到系統(tǒng)的一個(gè)靜態(tài)輸出反饋控制器:


圖1 當(dāng)=1.0,μ=0時(shí)系統(tǒng)的狀態(tài)響應(yīng)曲線

圖2 當(dāng)=1.0,μ=0時(shí)系統(tǒng)的輸出響應(yīng)曲線
從圖2可以看出,滿足參數(shù)條件(20)的系統(tǒng)(1)在靜態(tài)輸出反饋控制器(21)的作用下,系統(tǒng)的輸出y(t)在時(shí)刻t=4s處于穩(wěn)定狀態(tài),此時(shí)刻后輸出y(t)一直保持穩(wěn)定的狀態(tài)不變,而這里的輸出是系統(tǒng)狀態(tài)的體現(xiàn).也就是說(shuō),系統(tǒng)的狀態(tài)在靜態(tài)輸出反饋控制器(21)的作用下,從時(shí)刻t=4s以后一直保持穩(wěn)定的狀態(tài).
情形2與情形1比較可知,系統(tǒng)(1)的狀態(tài)在情形2中比在情形1中提前0.5s進(jìn)入穩(wěn)定狀態(tài).說(shuō)明設(shè)計(jì)的輸出反饋控制器比狀態(tài)反饋控制器的效果好些.
[1]Hmam iya T.Delay-independent stability of higher-order system s[J].Int.J.Cont.,1989,50(1):139-149.
[2]Hm am ed A.Further results on the delay-independent asym p totic stability of linear system s[J].Int.J.Sys. Sci.,1991,22(6):1127-1132.
[3]Wu M,He Y,She J H,et al.Delay-dependent criteria for robust stability of tim e-varying delay system s[J]. Automatica,2004,40(8):1435-1439.
[4]Zhang X M,Wu M,She J H,et al.Delay-dependent stabilization of linear system s with tim e-varying state and input delays[J].Autom atica,2005,41(8):1405-1412.
[5]Moon Y S,Park P,Kwon W H,et al.Delay-dependent robust stabilization of uncertain state-delayed system s[J].Int.J.Cont.,2001,74(14):1447-1455.
[6]He Y,Wu M,She J H.Parameter-dependent Lyapunov functional for stability of time-delay system swith polytopic type uncertainties[J].IEEE:Transactions on Autom atic Control,2004,49(5):828-832.
[7]Wu M,He Y,She JH.New delay-dependent robust stability criteria for uncertain neutral system s[J].IEEE: Transactions on Autom atic Control,2004,49(12):2266-2271.
[8]He Y,Wang Q G,Xie L,et al.Further im provement of free-weightingmatrices technique for system swith tim e-varying delay[J].IEEE:Transactions on Autom atic Control,2007,52(2):293-299.
[9]俞立.魯棒控制-線性矩陣不等式處理方法[M].北京:清華大學(xué)出版社,2002.
Stability analysis and controller design for a system with time delays
Qiu Jinxue,You Chengtao,Zhang Chunguo
(Deptartm ent of Mathem atics,Hangzhou Dianzi University,Hangzhou 310018,China)
This paper studies the linear system with tim e-varying state delays and tim e-varying input delays. First,it is analyzed stability of the system with tim e delays,by choosing a proper Lyapunov-K rasovskii functional,app lying Linear matrix inequality(LMI),and using Lyapunov-K rasovskii stabilization theorem.And then,it is designed corresponding controller.It is im p roved that som e result of linear system with tim e-varying delays.Finally,this result is checked by the num erical simulation.
time-delay system,lyapunov-K rasovskii functional,robust stability, linear m atrix inequality(LMI),feedback control
O231.4
A
1008-5513(2012)03-0391-10
2011-10-11.
國(guó)家自然科學(xué)基金(10771048).
邱金學(xué)(1987-),碩士生,研究方向:運(yùn)籌學(xué)與控制論.
2010 MSC:35Q 72
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17