基于模糊加權的分布式IMMJPDA算法
2012-07-11 09:42:08許江湖
艦船科學技術 2012年4期
黨 玲,許江湖
(1.海軍大連艦艇學院,遼寧 大連 116018;2.海軍工程大學電子工程學院,湖北 武漢 430033)
基于模糊加權的分布式IMMJPDA算法
黨 玲1,許江湖2
(1.海軍大連艦艇學院,遼寧 大連 116018;2.海軍工程大學電子工程學院,湖北 武漢 430033)
提出了一種基于模糊加權的分布式交互多模型聯(lián)合概率數(shù)據(jù)互聯(lián)算法。該算法在融合中心采用模糊加權方法對不同傳感器關于同一目標的模型概率、狀態(tài)估計及其協(xié)方差進行融合,而模糊權值為各傳感器關于各目標的狀態(tài)估計協(xié)方差的跡的隸屬度。最后通過計算機仿真驗證了該算法的正確性和有效性。
分布式多傳感器多目標跟蹤;交互多模型;模糊加權
0 引言
多傳感器多目標跟蹤是一項備受關注的研究課題,無論在軍事領域還是在民用領域,都具有十分重要的理論意義和工程應用價值。多傳感器多目標跟蹤的關鍵問題是狀態(tài)濾波估計和數(shù)據(jù)互聯(lián),其中有效方法主要集中在多模型(MM)算法和聯(lián)合概率數(shù)據(jù)互聯(lián)(JPDA)算法上。
自從文獻[1]將交互多模型(IMM)算法和JPDA相結合,提出了IMMJPDA算法后,由于其能較好地解決多目標跟蹤中的2個關鍵問題,即數(shù)據(jù)互聯(lián)和狀態(tài)濾波估計[2],國內外學者對該算法進行了相當多的研究和改進[3-8]。然而,只有文獻[8]提出的基于D-S理論的分布交互式多傳感器聯(lián)合概率數(shù)據(jù)互聯(lián)算法可以應用于分布式多傳感器多目標跟蹤的問題。該算法對每個傳感器應用交互式聯(lián)合概率數(shù)據(jù)互聯(lián)法跟蹤多目標,并將狀態(tài)估計、狀態(tài)估計協(xié)方差、模型概率、各模型狀態(tài)估計、組合新息、新息協(xié)方差等慮波結果送至融合中心。融合中心首先對各目標進行航跡關聯(lián)相關判別并應用D-S證據(jù)理論對不同傳感器關于同一目標的各模型概率進行融合,然后依此概率計算各目標狀態(tài)估計并反饋至各傳感器使之獲得更精確的狀態(tài)預測。但是研究發(fā)現(xiàn),該算法在對復雜機動目標的跟蹤中容易失去對目標的跟蹤。為此,本文提出了一種基于模糊加權的分布式交互多模型聯(lián)合概率數(shù)據(jù)互聯(lián)算法(DIMM-MSFJPDA),該算法在融合中心采用模糊加權方法對不同傳感器關于同一目標的模型概率、狀態(tài)估計及其協(xié)方差進行融合,而模糊權值為各傳感器關于各目標的狀態(tài)估計協(xié)方差的跡的隸屬度。通過仿真計算比較了該算法和基于D-S理論的算法的跟蹤性能。結果顯示,該算法可以提高跟蹤性能,特別是預先設計的模型集合和目標實際機動模式匹配程度不高時。
1 問題描述
假設用q個傳感器跟蹤雜波環(huán)境中的N個目標,模型集合為 M={m1,m2,…,mJ},J表示模型集合的長度。對于模型集合M中第j個模型,目標r的狀態(tài)和量測方程為:

2 基于模糊加權的分布式交互多模型聯(lián)合概率數(shù)據(jù)互聯(lián)算法
分布式多傳感器系統(tǒng)中,各傳感器將各自的濾波結果傳送至融合中心進行融合處理。本文提出的DIMM-MSFJPDA對各傳感器應用單傳感器的IMMJPDA算法,并將各目標基于模型的狀態(tài)估計及其相對應的估計協(xié)方差陣,模型概率送至融合中心進行航跡關聯(lián)。在融合中心,首先對這些濾波結果進行關聯(lián)判決,然后采用基于模糊加權的方法對各傳感器對應于同一目標的模型概率、基于各模型的狀態(tài)估計及其協(xié)方差陣進行融合,從而得到各目標的總體狀態(tài)估計及其相應的估計協(xié)方差陣,而模糊權值為各傳感器關于各目標的狀態(tài)估計協(xié)方差的跡的隸屬度。最后,將各目標的總體狀態(tài)估計反饋至各傳感器以期獲得更為精確的狀態(tài)預測。
設在k時刻第 i個傳感器傳送至融合中心關于目標r的信息向量為

對于已經確認為關于同一目標的信息向量,融合中心采用模糊加權方法對不同傳感器關于同一目標的模型狀態(tài)估計,相應的估計協(xié)方差陣,模型概率進行融合。由于各傳感器關于各目標的狀態(tài)估計協(xié)方差陣(由式(6)計算)反應了該傳感器對該目標的濾波精度,而濾波精度應該決定該傳感器對目標的狀態(tài)估計、協(xié)方差陣和模型概率在融合中心進行融合時的權重。因此這里的模糊加權方法將各傳感器關于各目標的狀態(tài)估計協(xié)方差陣的跡看作1個模糊集中的元素,跡的大小將決定隸屬度的大小,而隸屬度由模糊集的隸屬函數(shù)映射而得。這里的隸屬函數(shù)定義為:

式中:c為歸一化因子;σ(k)為尺度參數(shù)。定義分別為
令k時刻融合中心對目標r基于模型j的狀態(tài)估計、相應的估計協(xié)方差陣,模型概率分別為 X^r,j,Pr,j和 μr,j,則有

利用式(10)~式(12)的計算結果,可得融合中心對目標r的總體狀態(tài)估計及相應的狀態(tài)估計協(xié)方差陣:最后融合中心將X^r,j(r=1,…,N;j=1,…,J)反饋至各傳感器,以期獲得更為精確的狀態(tài)預測。
3 計算機仿真
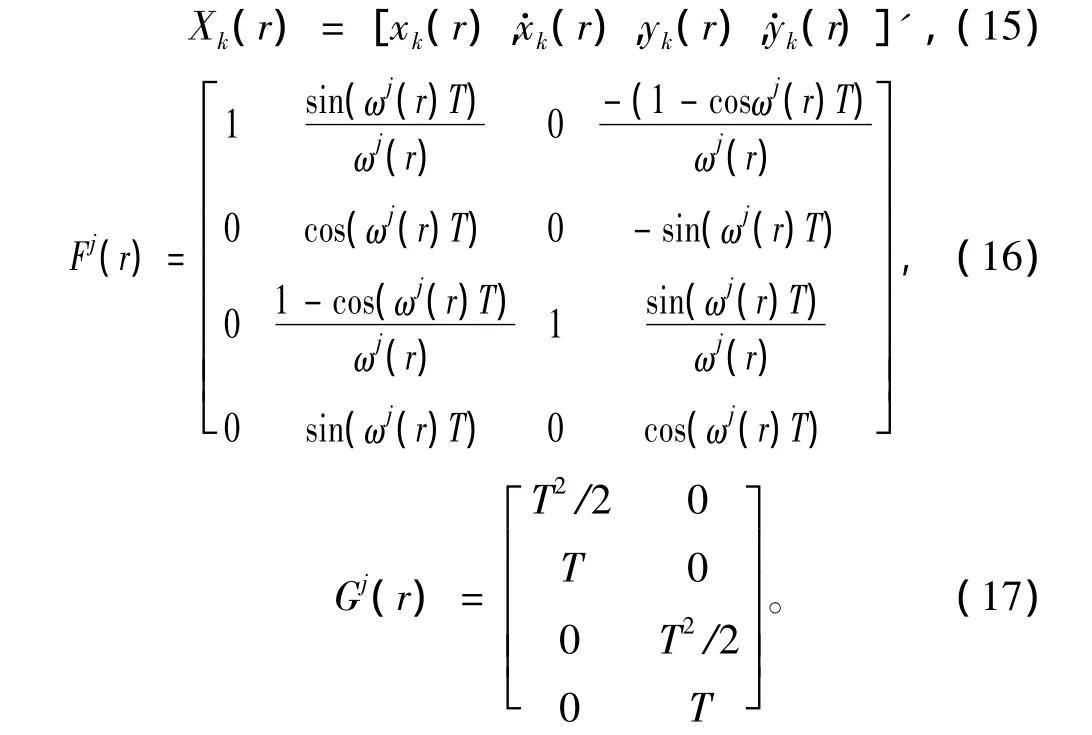
為了驗證本文算法的有效性,通過雜波環(huán)境下對2個強機動目標的跟蹤來比較本文算法和基于D-S理論的分布交互式多傳感器聯(lián)合概率數(shù)據(jù)互聯(lián)算法(DIMM-MSDSJPDA)的性能。仿真中采用的機動模型為協(xié)同轉彎模型[9],這樣式(1)中:
目標1的初始狀態(tài)為[31851,-8.3,28638,- 399.9]',機動想定為:在1 ~ 40 s,56 ~ 75 s,88 ~130 s,目標1作勻速直線運動;在41~55 s,76~87 s,目標1分別作了2個轉彎,轉彎速率分別為- 8.6,5.7°/s。
目標 2的初始狀態(tài)為[47240,-380,4712,124.9]',機動想定為:在1 ~ 70 s,91 ~ 130 s,目標1作勻速直線運動;在71~90 s,目標2作了1個轉彎,轉彎速率為 -4.3°/s。2個目標的機動航跡如圖1所示。
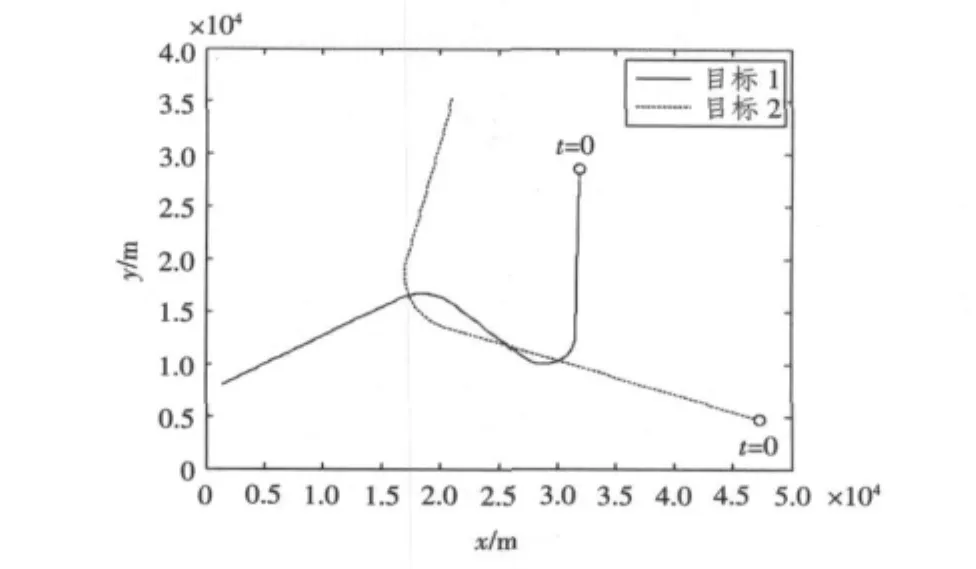
圖1 目標航跡圖Fig.1 The true trajectories of the targets


顯然,M1比M2更匹配目標的實際機動模式。
為了比較2種算法的性能,將進行50次Monte Carlo仿真后的位置和模型估計均方根誤差。而k時刻模型估計均方根誤差的定義為[10]:

式中:N為仿真次數(shù);mk為目標真實的機動模式;m^k為估計的機動模型,其定義為:

其中:μj(k)為k時刻模型mj的模型概率。由于模型mj(j=1,…,J)是預先確定的,因此模型估計均方根誤差反映了多模型算法為了匹配目標真實機動模式而調整其模型概率的準確性,從而也從另一個方面反映了多模型算法的跟蹤性能。
進行50次Monte Carlo仿真。圖2和3分別為DIMM-MSFJPDA、DIMM-MSDSJPDA采用模型集合M1時對目標1和目標2濾波的位置均方根誤差;圖4和圖5則分別是采用模型集合M2時對目標1和目標2濾波的位置均方根誤差;圖6和圖7分別是對目標1和目標2的模型估計均方根誤差。
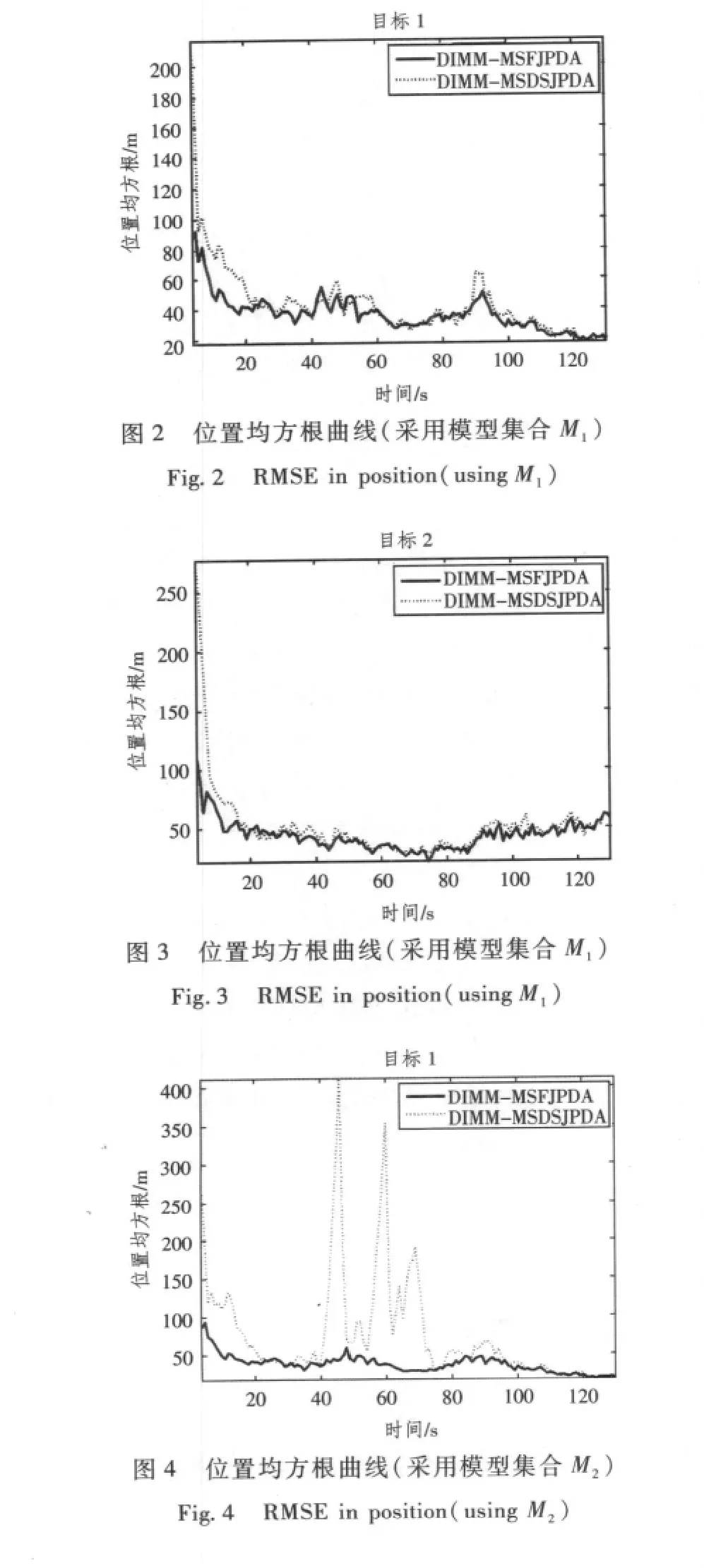
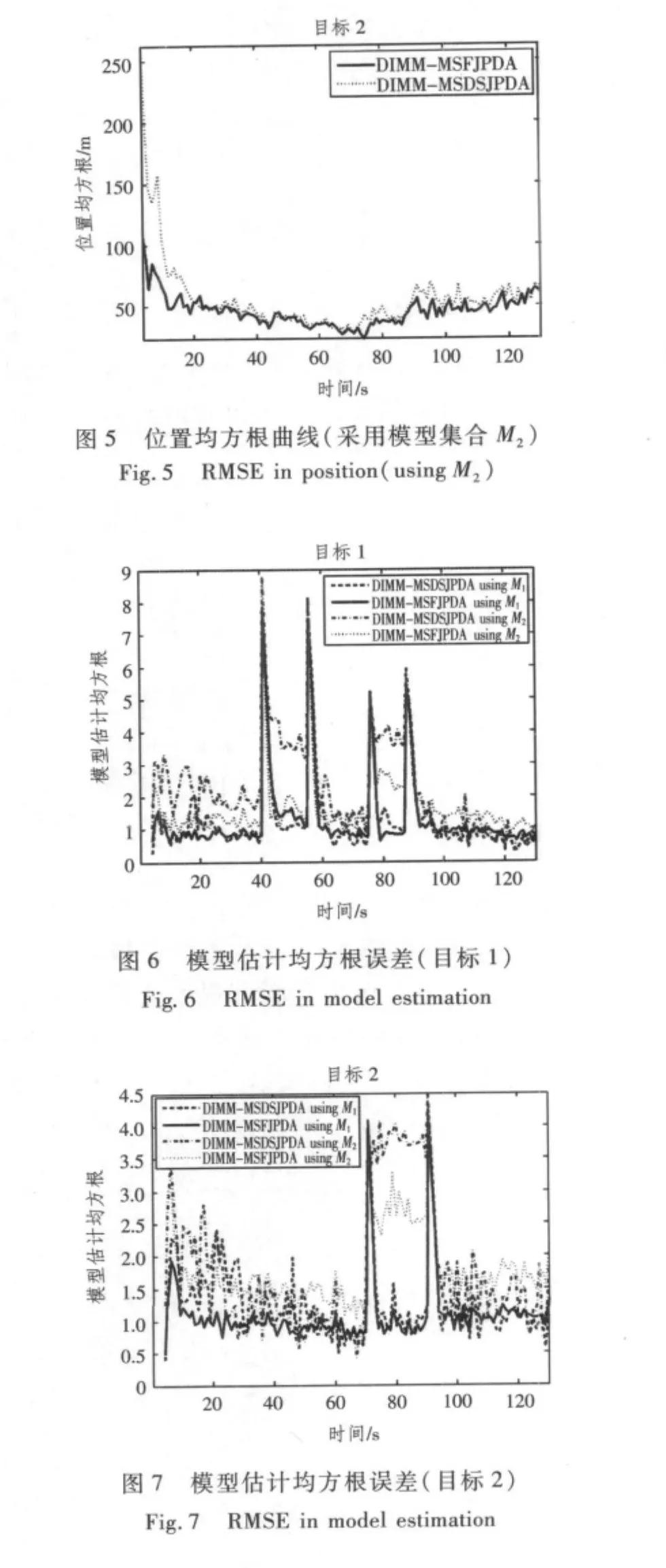
從圖2和圖3可以看出,當采用模型集合M1時,DIMM-MSFJPDA對2個目標的跟蹤性能略好于DIMM-MSDSJPDA。從圖4和圖5可以看出,當采用模型集合M2時,DIMM-MSFJPDA對2個目標的跟蹤性能明顯優(yōu)于DIMM-MSDSJPDA。圖6和圖7進一步說明了上述事實。
4 結語
本文提出了一種基于模糊加權的分布式交互多模型聯(lián)合概率數(shù)據(jù)互聯(lián)算法(DIMM-MSFJPDA),該算法在融合中心采用模糊加權方法對不同傳感器關于同一目標的各模型概率進行融合,而模糊權值為各傳感器關于各目標的狀態(tài)估計協(xié)方差的跡的隸屬度。通過仿真計算比較了該算法和基于D-S理論的分布交互式多傳感器聯(lián)合概率數(shù)據(jù)互聯(lián)算法的跟蹤性能。結果顯示,該算法可以提高跟蹤性能,特別是在預先設計的模型集合和目標實際機動模式匹配程度不高時。
[1]De FEO M,GRAZIANO A,MIGLIOLI R,et al.IMMJPDA versus MHT and Kalman filter with NN correlation:performance comparison[J].IEE Proc-Radar Sonar Navig.,1997,144(2):49 -56.
[2]李輝,沈瑩,等.交互式多模型目標跟蹤的研究現(xiàn)狀及發(fā)展趨勢[J].火力與指揮控制,2006,31(11):1 -4.
[3]CHAN B,TUGNAIT J K.Tracking of multiple maneuvering targets in clutter using IMM/JPDA filtering and fixed-lag smoothing[J].Automatica,2001,37:239 -249.
[4]TUGNAIT J K.Tracking of multiple maneuvering targets in clutter using multiple sensors,IMM,and JPDA coupled filtering[J].IEEE Transactions on Aerospace and Electronic Systems,2004,40(1):320 -330.
[5]PURANIK S,TUGNAIT J K.Tracking ofmultiple maneuvering targetsusingmultiscan JPDA and IMM filtering[J].IEEE Transactions on Aerospace and Electronic Systems,2007,43(1):23 -35.
[6]張晶煒,熊偉,何友.集中交互式多傳感器聯(lián)合概率數(shù)據(jù)互聯(lián)算法[J].光電工程,2006,33(11):26 -30.
[7]張晶煒,何友,熊偉.集中交互式多傳感器模糊聯(lián)合概率數(shù)據(jù)互聯(lián)算法[J].電子學報,2008,36(8):1655 -1659.
[8]張晶煒,修建娟,何友,等.基于D-S理論的分布交互式多傳感器聯(lián)合概率數(shù)據(jù)互聯(lián)算法[J].中國科學(E輯:信息科學),2006,36(2):182 -190.
[9]LI X R,BAR-SHALOM Y.Design ofan interacting multiple model algorithm for tracking in air traffic control systems[J].IEEE Transactionson ControlSystems Technology,1993,1(3):186 -194.
[10]LI X R,ZHANG Y M.Multiple-model estimation with variable structure part V:likely-model set algorithm[J].IEEE Transactions on Aerospace and Electronic Systems,2000,36(2):448 -466.
Distributed interacting multiple model joint probabilistic data association algorithm based on fuzzy weighted method
DANG Ling1,XU Jiang-hu2
A distributed interacting multiple model joint probabilistic data association algorithm based on fuzzy weighted method is presented in this paper.The model probabilities,state estimation and its covariance of same target corresponding to different sensors are fused in the fusion centre using fuzzy weighted method in the algorithm.The fuzzy weight is membership degree of trace of covariance of same target corresponding to different sensors.The validity and effectivity of the algorithm are tested by computer simulation.
distributed multisensor multitarget tracking;interacting multiple model;fuzzy weight
TN957
A
1672-7649(2012)04-0067-04
10.3404/j.issn.1672-7649.2012.04.015
2011-11-19;
2011-12-05
中國博士后科學基金資助項目(20090461460)
黨玲(1964-),女,副教授,研究方向為信號與信息處理技術。
(1.Dalian Naval Academy,Dalian 116018,China;2.College of Electronics Engineering,Naval University of Engineering,Wuhan 430033,China)
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
今日農業(yè)(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數(shù)理化(高中版.高考數(shù)學)(2021年1期)2021-03-19 08:28:38
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
無線電工程(2020年11期)2020-10-29 01:25:46
現(xiàn)代出版(2020年3期)2020-06-20 07:10:34
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
