下肢外骨骼康復(fù)機(jī)器人的自適應(yīng)控制研究
2012-07-11 07:42:56陳貴亮李長(zhǎng)鵬劉更謙
制造業(yè)自動(dòng)化 2012年24期
陳貴亮,李長(zhǎng)鵬,劉更謙
(河北工業(yè)大學(xué) 機(jī)械學(xué)院,天津 300130)
0 引言
我國(guó)和世界上許多國(guó)家一樣正在進(jìn)入老齡化。大量老齡人患有偏癱癥狀的腦血管疾病,中國(guó)的發(fā)病率稍偏高于世界平均水平,屬于腦卒中高發(fā)地區(qū)之一,而且在年齡上呈現(xiàn)出年輕化趨勢(shì)[1]。
70%~80%的腦卒中患者會(huì)留有不同程度的下肢運(yùn)動(dòng)障礙。臨床醫(yī)學(xué)證明,腦卒中偏癱患者除了手術(shù)和必要的藥物治療以外,早期的運(yùn)動(dòng)康復(fù)治療能夠明顯提高患者肢體運(yùn)動(dòng)功能的最終恢復(fù)程度。神經(jīng)康復(fù)醫(yī)學(xué)理論證明:中樞神經(jīng)系統(tǒng)具有高度可塑性。以此為依據(jù),通過將計(jì)算機(jī)控制技術(shù)、康復(fù)醫(yī)學(xué)和機(jī)器人相結(jié)合,將醫(yī)師從傳統(tǒng)的“多對(duì)一”康復(fù)訓(xùn)練模式中解放出來(lái),為患者提供科學(xué)的、安全的和高效率的康復(fù)訓(xùn)練。因此,康復(fù)機(jī)器人技術(shù)已成為國(guó)內(nèi)外研究的熱點(diǎn)。
文獻(xiàn)[2~4]中闡述了魯棒自適應(yīng)控制應(yīng)用于不確定性機(jī)器人軌跡跟蹤問題的研究成果,但仍存在著控制器結(jié)構(gòu)復(fù)雜、計(jì)算量大和穩(wěn)定性差等問題。將預(yù)先獲得的近似模型作為標(biāo)稱模型用于控制器設(shè)計(jì),能夠減輕計(jì)算機(jī)運(yùn)行負(fù)擔(dān),縮短運(yùn)算時(shí)間,實(shí)現(xiàn)在線實(shí)時(shí)控制。文獻(xiàn)[5~7]中的控制方法并沒有考慮未建模動(dòng)態(tài)和環(huán)境不確定因素。
本課題組研發(fā)的下肢外骨骼康復(fù)機(jī)器人系統(tǒng)具有強(qiáng)耦合非線性動(dòng)態(tài)特性和參數(shù)不確定的特征。本文中根據(jù)其動(dòng)力學(xué)模型特征和康復(fù)訓(xùn)練控制要求,采用的變結(jié)構(gòu)魯棒自適應(yīng)補(bǔ)償控制器不需對(duì)系統(tǒng)的未知參數(shù)進(jìn)行估計(jì),通過引入非線性阻尼項(xiàng)來(lái)消除未建模動(dòng)態(tài)、未知有界擾動(dòng)和參數(shù)不確定性的影響。將兩個(gè)相互獨(dú)立的控制器相結(jié)合可以達(dá)到對(duì)這類系統(tǒng)實(shí)時(shí)、精確的控制目的。利用Lyapunov理論對(duì)其進(jìn)行的分析和仿真實(shí)驗(yàn)研究證明了系統(tǒng)的穩(wěn)定性。
1 下肢外骨骼康復(fù)機(jī)器人系統(tǒng)
下肢外骨骼康復(fù)機(jī)器人虛擬樣機(jī)及其右腿結(jié)構(gòu)簡(jiǎn)圖如圖1所示。
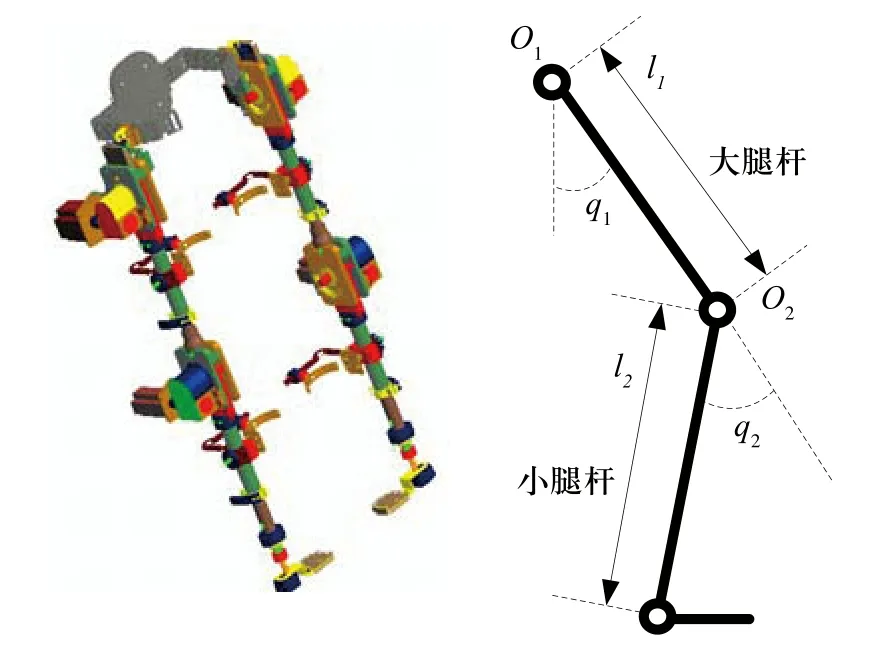
圖1 下肢外骨骼康復(fù)機(jī)器人虛擬樣機(jī)及其右腿結(jié)構(gòu)簡(jiǎn)圖
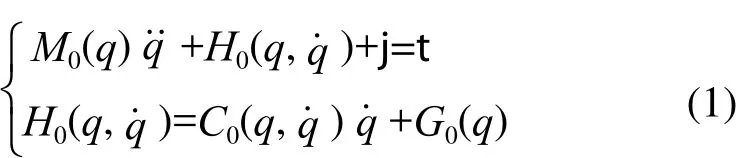
外骨骼機(jī)器人大腿桿繞點(diǎn)O1轉(zhuǎn)動(dòng),長(zhǎng)度為l1,與豎直垂線之間的夾角為髖關(guān)節(jié)角q1;小腿桿繞點(diǎn)O2轉(zhuǎn)動(dòng),長(zhǎng)度為l2,與大腿桿延長(zhǎng)線的夾角為膝關(guān)節(jié)角q2。根據(jù)以上下肢外骨骼康復(fù)機(jī)器人系統(tǒng)的物理模型,可為其建立完整的拉格朗日動(dòng)力學(xué)方程為:
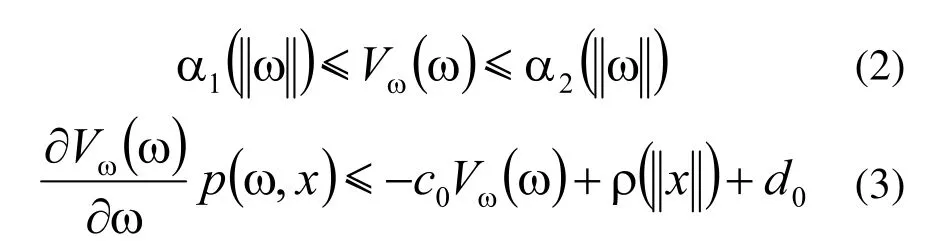
這里,a1, a2為類函數(shù),c0>0, d0≥0為常數(shù)。為了不失一般性,我們假設(shè)r(·)有這樣的形式:r(h) =h2r0(h2),其中,r0是一個(gè)非負(fù)的光滑函數(shù)。否則,我們可以將r表示為是一個(gè)充分小的實(shí)數(shù)。
為了描述未建模動(dòng)態(tài)對(duì)控制系統(tǒng)的影響,我們使用一個(gè)動(dòng)態(tài)信號(hào)r,定義為:


且對(duì)于所有t≥0,式(5)成立。對(duì)于所有t≥T0≥0,存在一個(gè)有限常數(shù)T0,使得D(t)=0。
由式(2)和式(5)得:


j'(w, q, u, t)為系統(tǒng)中不確定非線性以及和未建模動(dòng)態(tài)w及q、u、 有關(guān)的不確定性,j'和p都是未知的非線性Lipschitz連續(xù)函數(shù),并且滿足:

由式(6)~式(8)得:

T負(fù)為負(fù)載作用等效到關(guān)節(jié)的等效力矩,可由力傳感器和其到相應(yīng)關(guān)節(jié)的距離獲得;非線性摩擦T摩=[F1F2]T可表示為[9]:
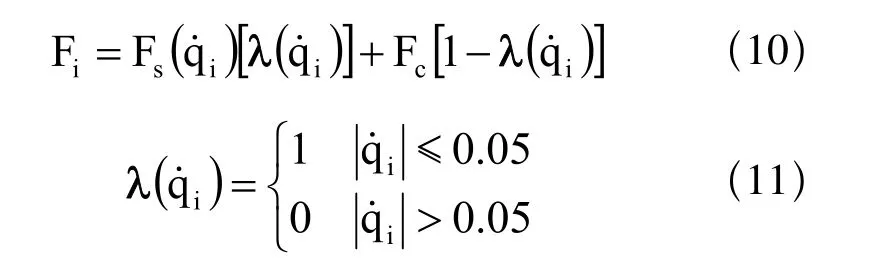
式中,F(xiàn)s,F(xiàn)c分別為未知的靜摩擦力和動(dòng)摩擦力,正常數(shù)ds、dc分別為其上界,i=1, 2。
根據(jù)以上的分析推導(dǎo),為減輕系統(tǒng)計(jì)算負(fù)擔(dān),對(duì)下肢外骨骼康復(fù)機(jī)器人系統(tǒng)的不確定性進(jìn)行參數(shù)分離得:

2 控制器設(shè)計(jì)及穩(wěn)定性分析
下肢外骨骼康復(fù)機(jī)器人系統(tǒng)的標(biāo)稱動(dòng)力學(xué)模型為:)
根據(jù)文獻(xiàn)[10]中的計(jì)算力矩控制設(shè)計(jì)方法,則系統(tǒng)的標(biāo)稱輸入力矩和輸入加速度矢量分別為:


因此外骨骼康復(fù)機(jī)器人系統(tǒng)的標(biāo)稱力矩輸入為:

由式(13)和(17)得誤差方程:

根據(jù)以上可知,這是基于機(jī)器人標(biāo)稱模型的前饋加反饋控制,前饋的作用在于抵消各關(guān)節(jié)的耦合,反饋則用于補(bǔ)償跟蹤偏差。式(18)表明如果適當(dāng)選擇反饋增益KD,Kp軌跡誤差可以漸近穩(wěn)定收斂于0。
將式(17)帶入式(1)得:


將式(20)帶入實(shí)際模型式(1)有:

上式表明,如果通過適當(dāng)?shù)剡x擇補(bǔ)償控制器,并使計(jì)算出的補(bǔ)償值能趨近于系統(tǒng)的不確定項(xiàng),能夠使下肢外骨骼康復(fù)機(jī)器人的實(shí)際系統(tǒng)達(dá)到期望的指標(biāo)。

已知A為穩(wěn)定矩陣,則存在一個(gè)正定矩陣P使下列Lyapunov方程有解:ATP+PA=-Q,其中,QR2×2是給定的正定對(duì)稱矩陣。
針對(duì)式(22)給出下列變結(jié)構(gòu)魯棒自適應(yīng)控制算法[11]:


其中,對(duì)角陣 為參數(shù)自適應(yīng)修正速率,s為系統(tǒng)特性設(shè)計(jì)給定的修正參數(shù),用于增加系統(tǒng)的魯棒性。
選取Lyapunov函數(shù)為:

將式(25)對(duì)時(shí)間求導(dǎo)得:
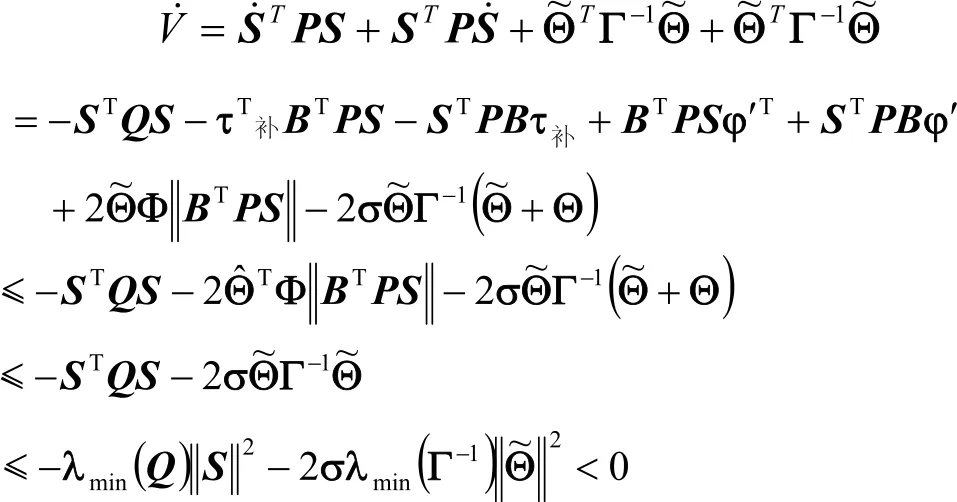
通過上面的推導(dǎo)得知Lyapunov函數(shù)滿足以下條件:

根據(jù)Lyapunov定理,下肢外骨骼康復(fù)機(jī)器人的實(shí)際系統(tǒng)達(dá)到期望的指標(biāo),即全局指數(shù)穩(wěn)定。
3 仿真實(shí)驗(yàn)
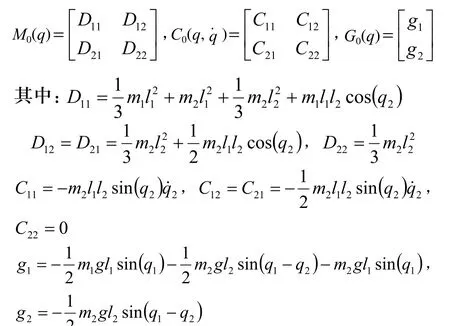
采用課題中下肢外骨骼康復(fù)機(jī)器人的數(shù)學(xué)模型用于仿真實(shí)驗(yàn),以驗(yàn)證本文算法的可行性和有效性。以男性身高175mm,體重70kg為康復(fù)訓(xùn)練對(duì)象,人體和外骨骼結(jié)構(gòu)參數(shù)為大、小腿質(zhì)量分別為6.72kg和2.94kg,大腿桿質(zhì)量和長(zhǎng)度為m1=1.5kg,l1=0.5m,小腿桿質(zhì)量和長(zhǎng)度為m2=1kg,l2=0.4m,桿上相應(yīng)的傳感器到髖、膝關(guān)節(jié)的距離分別為0.25m和0.2m。則式(1)中的M0(q)、C0(q, q.)、G0(q)具體表達(dá)式為:
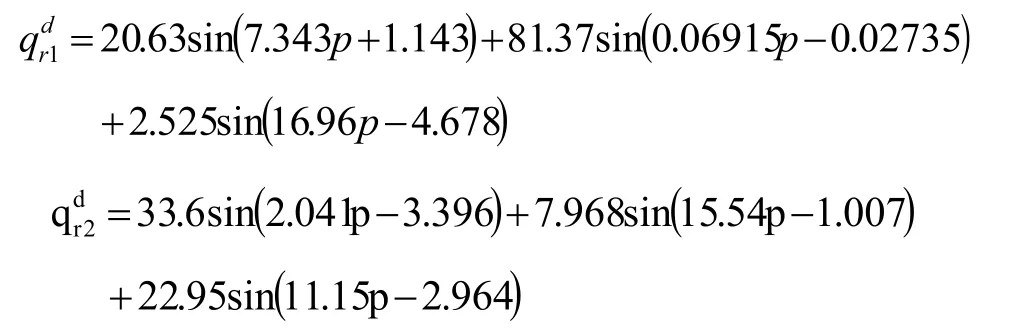
利用Matlab/Simulink仿真工具箱并用M文件編寫S函數(shù)模塊進(jìn)行仿真,先對(duì)美國(guó)斯坦福大學(xué)開發(fā)的OpenSim軟件[12]中提供的人體步態(tài)數(shù)據(jù)進(jìn)行擬合,獲得右髖、膝關(guān)節(jié)的跟蹤軌跡為:

盡管系統(tǒng)存在未建模動(dòng)態(tài)和擾動(dòng)等,采用兩個(gè)獨(dú)立控制器的聯(lián)合作用后,實(shí)際軌跡能夠快速跟蹤期望軌跡,開始時(shí)小幅度地跟隨曲線趨勢(shì)的變化,存在的位置誤差被控制在人體關(guān)節(jié)運(yùn)動(dòng)的安全范圍內(nèi),并且保證指數(shù)意義下漸近穩(wěn)定、全局收斂一致有界。
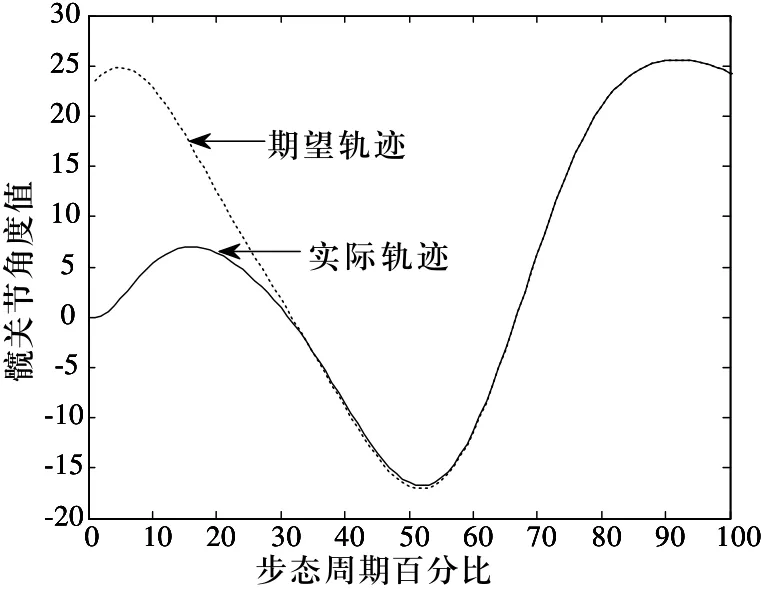
圖2 2s步態(tài)周期髖關(guān)節(jié)角度軌跡
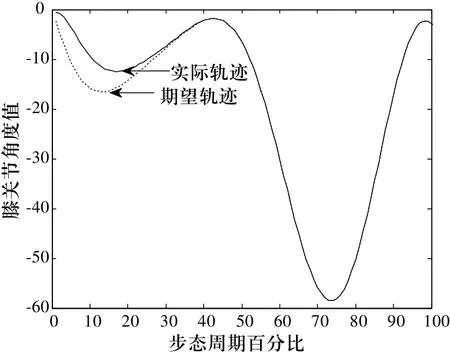
圖3 2s步態(tài)周期膝關(guān)節(jié)角度軌跡
4 結(jié)論
分析證明,本文針對(duì)本課題組研發(fā)的下肢外骨骼康復(fù)機(jī)器人系統(tǒng)動(dòng)力學(xué)模型的非線性,所提出的兩個(gè)相互獨(dú)立的控制器共同作用,基于標(biāo)稱模型的計(jì)算力矩控制器通過高頻采樣,實(shí)現(xiàn)有偏差跟蹤的控制方法,可以減輕計(jì)算機(jī)負(fù)擔(dān),保證系統(tǒng)的實(shí)時(shí)性。利用變結(jié)構(gòu)魯棒自適應(yīng)控制構(gòu)造的補(bǔ)償控制器,彌補(bǔ)由于未建模動(dòng)態(tài)、外部有界擾動(dòng)和非線性不確定項(xiàng)等造成的影響,通過引入的滑動(dòng)方程使系統(tǒng)狀態(tài)在有限時(shí)間內(nèi)到達(dá)切換面,開始存在的位置誤差在人體關(guān)節(jié)運(yùn)動(dòng)的安全范圍內(nèi),符合康復(fù)醫(yī)學(xué)的要求。仿真實(shí)驗(yàn)研究結(jié)果表明,本文提出的控制策略在跟蹤速度和精度上都具有明顯優(yōu)勢(shì)。
[1] 南登. 康復(fù)醫(yī)學(xué)[M]. 人民衛(wèi)生出版社, 2005: 1-35.
[2] Ortega R, Spong M W. An adapative motion control of rigid robot.Proc IEEE Conf Decis Control[C], Austin, TX, USA,1988. 1575-1584.
[3] Jun-ichi Imura, Toshiharu Sugie, Tsuneo Yoshikawa.Adaptive robust control of robot manipulatorw-theory and experiment [J], IEEE Trans Automat Control, 1994, 10(5):705-710.
[4] 代穎. 不確定性機(jī)器人的魯棒自適應(yīng)控制方法研究[D].西安: 西安交通大學(xué)電信學(xué)院. 1998.
[5] Lin Wei, Qian Chunjiang. Adaptive control of nonlinearly parameterized systems: the smooth feedback case [J]. IEEE Trans Automat Contr, 2002, 47(8): 1249-1266.
[6] Riener R,Lunenburger L,Jezernik S,et al. Patientcooperative strategies for robot-aided treadmill training:first experimental results [J]. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2005, 3(13):380-394.
[7] Jezernik S, Colombo G, Morari M. Automatic gait-pattern adaptation algorithms for rehabilitation with a 4-DOF robotic orthosis [J]. IEEE Transaction on Robotics and Automation, 2004, 20(3):574-582.
[8] Jiang, Z P, Praly L. Design of robust adaptive controllers for nonlinear systems with dynamic uncertainties[J].Automatica, 1998, 34:825-840.
[9] Southward SC, Radcliffe CJ, MacCluer CR. Robust nonlinear stick-slip friction compensation. ASME Journal of Dynamic Systems[J]. Measurement and Control, 1991,113:639-645.
[10] Markicwica B R. Analysis of the computed-torque drive method and computer-controlled manipulator. Technology Memo[M], 33-601, Jet Propulsion Lab, Pasadena, CA,1973.
[11] 楊鹽生, 賈欣樂. 不確定系統(tǒng)的魯棒控制及其應(yīng)用[M].大連: 大連海事大學(xué)出版社, 2003.
[12] Scott L. Delp, Frank C. Anderson, Allison S. Arnold, Peter Loan, Ayman Habib, Chand T. John, Eran Guendelman,and Darryl G. Thelen, OpenSim: Open-Source Software to Create and Analyze Dynamic Simulations of Movement[J].IEEE Transactions on Biomedical Engineering,2007,54(11): 1940-1950.
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
特別健康(2018年2期)2018-06-29 06:13:44
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
中國(guó)衛(wèi)生(2014年6期)2014-11-10 02:30:50
