
基于PID算法的大功率LED驅動電源設計
2012-07-12 07:05:52順德職業技術學院李國焱林云鋒
電子世界 2012年10期
順德職業技術學院 李國焱 林云鋒
一、引言
現在主流的照明光源是高壓氣體放電的,這種照明系統效率低、消耗能量多,并且污染環境,而LED照明系統是一種全固態冷光源,它擁有各種優點:工作時間長、能量消耗低、安全性高、綠色環保。但是大功率LED照明系統在使用中存在一些問題,如:轉換效率低、穩定性差、調光效率不夠高等。解決這個問題的一種途徑是設計高轉換效率、調光效率、恒流精確和電磁兼容性更好的大功率LED驅動電源。本文設計了基于PID算法的大功率LE D驅 動電源。
二、基于PID算法的大功率LED驅動電源設計方案
設計并制作數控大功率LED驅動電源,交流輸入電壓為180V-250V,50Hz,輸出直流電壓小于或者等于20V。圖1是基于PID算法的大功率LED驅動電源原理圖。
設計基于反激式LED驅動器SSL2101,引入反饋信號控制,輸出PWM脈沖到亮度引腳和PWM,形成固定電流輸出,發光強度通過動態控制系統控制,然后根據熱量分布實時控制電流。系統同時采用光傳感器跟蹤、自適應調節照明系統的亮度。在軟件設計中,基于遺傳算法優化PID算法參數,達到對輸出電流的精確控制,同時提高 穩定性,輸出使用交錯式PFC控制器控制輸出相位。
三、基于優化PID算法的大功率LED驅動電源硬件與軟件設計
硬件電路包括系統控制器、固定電流源電路,A/D轉換電路和交錯式PFC控制器。目前,大多數數控固定電流源 設計都是基于51系列微控制器MCU,但是執行速度低、并且穩定性差。Atmega128微控制器具有高速工作處理能力,良好的穩定性,并且它有一個可編程的內置振蕩器看門狗定時器,Atmega128微控制器擁有8個通道單端或者差分輸入的10比特A/D轉換器,本系統即使用Atmega128微控制器,它的定時器帶來高精度、中斷匹配功能,并且能夠幫助實現高精度優化PID算法。固定電流源由輸出電路、振蕩器和緩沖器,VCC,電源劃分控制電路,可變光學檢測,電源網絡總線緩沖器和輸入電路。
SSL2101是NXP半導體公司的第一個集成可調LED驅動控制器的微控制器,它具有很多優點:高集成度、需要的外部元件少、高性價比,因此它是設計大功率LED驅動 電源的首選,本文選擇SSL2101構成反激式電源轉換器,圖2是SSL2101反激式電路,反激式電源轉換器包括輸出電路、振蕩器、緩沖電路,可調檢測,電源網絡總線緩沖器和輸入電路。通過每個部分電路的功能設計和計算,我們設計了用于本系統的固定電流驅動電源。
本系統使用了PWM可調模式,采樣信號經A/D處理,被送到控制器,然后控制器通過優化的PID算法 產生PWM控制信號。信號輸出SSL2101亮度和PWM,然后實現優化的照明系統可調控制。設計中有靈活的可調設置,因為SSL2101能夠獲得溫度測試模塊的溫度和光傳感器測試得到的光通量信號。溫度和光通量信號可以改變PWM脈沖信號的占空比,從而調節LED的亮度,它也能夠在不同條件下通過程序設置調節,節省能量。
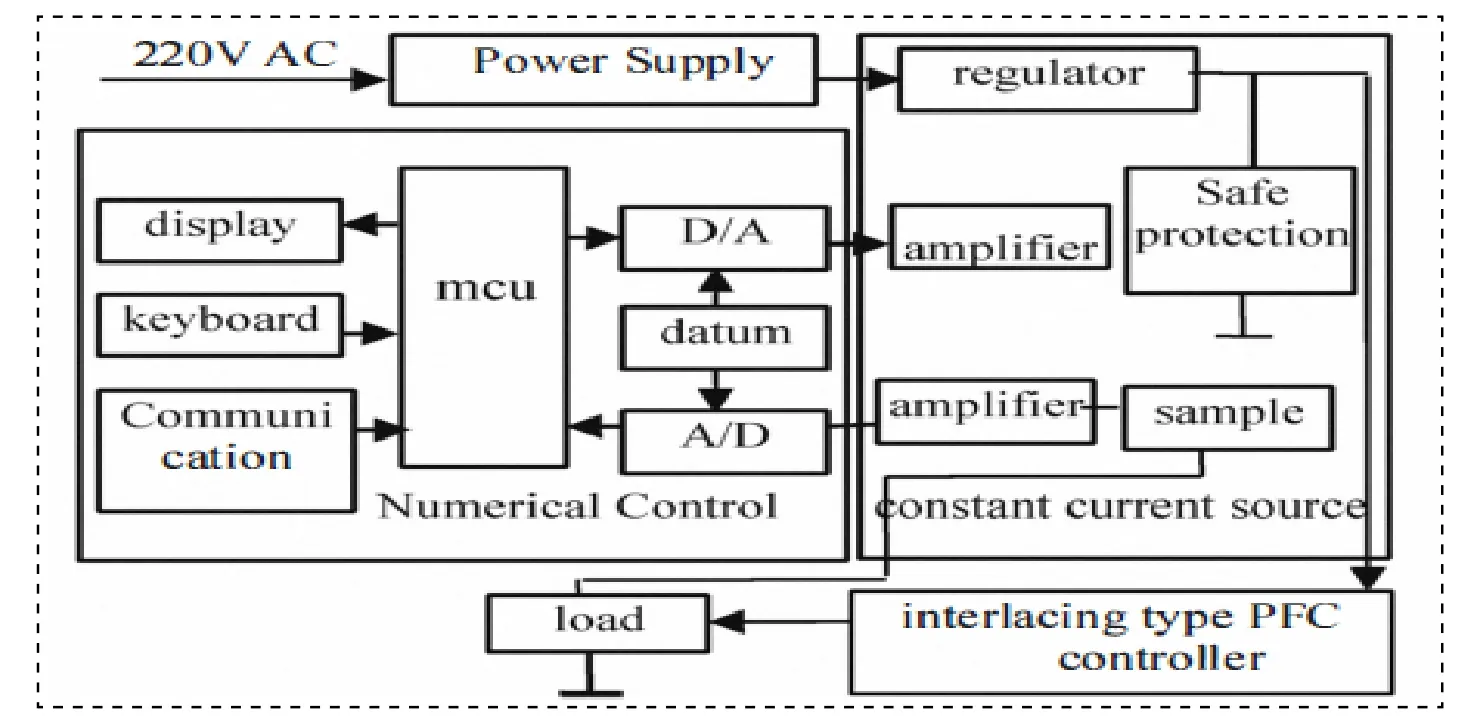
圖1 大功率LED驅動電源原理圖

圖2 SSL2101反激式電路
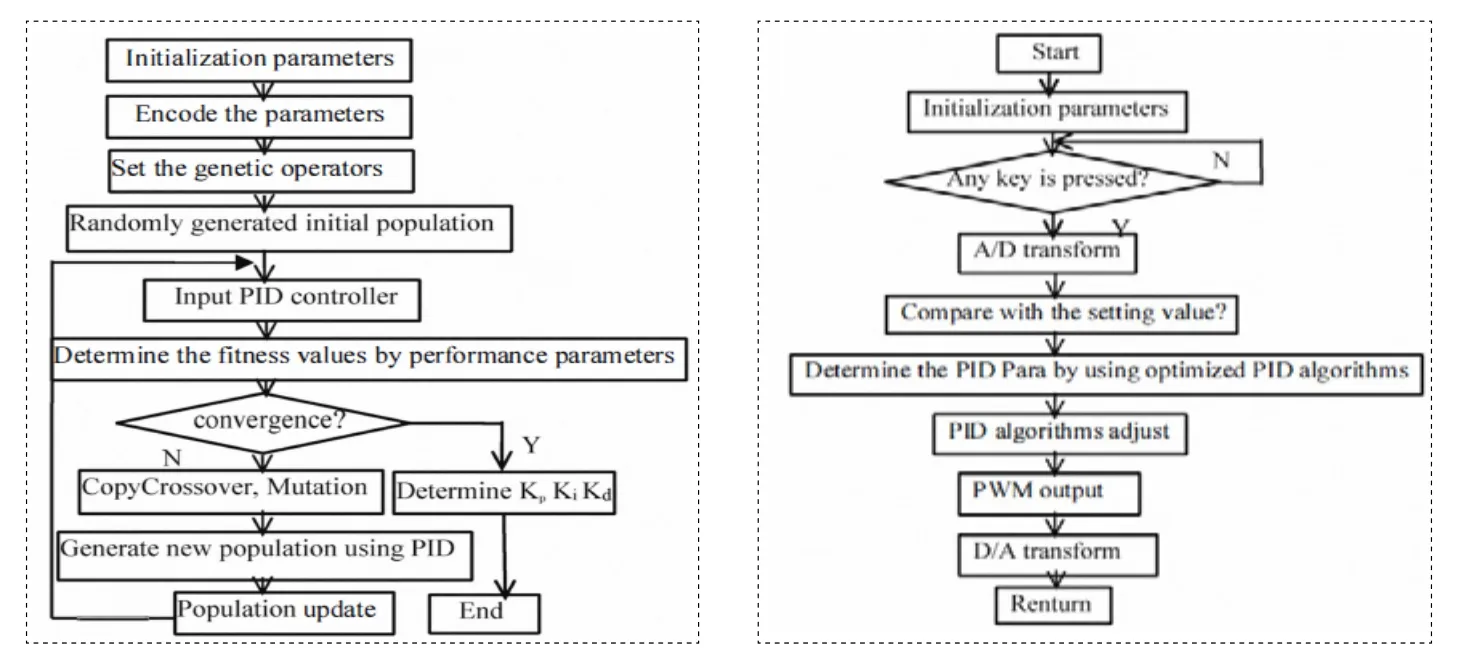
圖3 PID算法流程圖 圖4 主程序流程圖
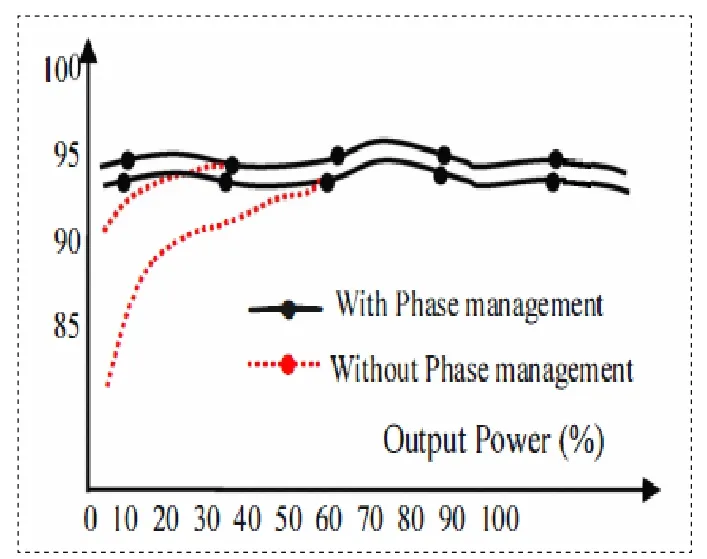
圖5 使用相位管理前后的電源負載線
使用FAN9612芯片設計交錯型PFC控制器,它能夠使得兩個信號輸出相位相差180度。當切換周期有一個頻率變化,控制器能夠達到同步和鎖定另外一個相位的頻率。因此,這個方法能夠降低損耗,特別是在大電流應用中。FAN9612擁有擴展的功耗范圍,并且能夠降低電流紋波、峰值電流。電源功耗轉換效率可以達到96%。
PID控制器的參數調節是控制系統設計的核心內容,本文使用遺傳算法,它可以優化參數設置提高PID控制的精度和電源的穩定性、更好的效率。遺傳算法優化參數設置的流程圖如圖3所示。
首先,我們確定優化參數和編碼方式,遺傳算法實際上是一種智能搜索優化技術,本文,我們使用實際代碼搜索PID控制器的三個參數kp,ki,kd。其次,產生原始群體。使用遺傳代數學提高算法搜索范圍,然后我們得到全局優化解決方法,本文隨機產生90個初始個體。考慮參數搜索優化的實際要求和遺傳算法的效率,我們設置最大 的遺傳代為100。
然后,確定合適的函數GA,我們在進化搜索中不需要外部信息,進化搜索基于合適的函數和個體的適合值。因此選擇合適的函數非常重要。它直接影響GA的收斂速度和是否能夠找到優化的解決方法。ITAE指標是反映誤差e(t)的積分的綜合指標。如果系統響應,過沖和靜態誤差很低,這個值就會很低。
合適的函數定義如下:

首先,我們將離散化數據,然后我們根據前一步確定每個個體的遺傳操作,計算每一代合適的函數值。最后,然后獲得遺傳操作。
復制操作:每個個體的選擇概率Pi是:

Fi是個體i的自適應值,值越小越好,因此我們 在個體復制操作之前得到值的倒數,k是系數,N是個體的數量。
交叉操作:個體使用實際代碼,因此交叉操作使用實際方法,這個方法使k染色體和i染色體的交叉操作如下:

其中b是一個在[0,1]之間的隨機數。變異操作:

amax是基因aij的上限,amin是下限,f(g)=r2(1-g/Gmax),r2是隨機數,g是當前迭代,Gmax是進化的最大數,r是一個位于[0,1]之間的隨機數。復上述步驟,直到完成100次操作,然后輸出目標值,即是搜索優化的參數。
基于模塊化思想,系統軟件混合使用C和匯編語言編程,同時使用C語言的高效率和快速開發特點,匯編語言的簡便性,系統軟件包括輸出設置、電流調節等。軟件包括主程序,A/D采樣子程序和按鈕控制程序,PID算法子程序,優化算法子程序,顯示子程序等。主程序的流程圖如圖4。
四、實驗數據分析
表1是測試得到的電源電壓變化時的電流值,負載效率曲線通過使用交錯型PFC控制器得到了很大提高,仿真示于圖5, 曲線表明了使用相位管理對性能的提高。
五、結語
本文中設計基于反激式LED驅動器SSL2101,并且利用了新的微處理器Atmega128實時采樣負載電流,然后通過優化的PID算法處理用戶設置的電流值。最后,我們通過算法結果反饋控制電流源,固定電源的精度和穩定性得到了很大提高。實驗結果表明這個方法能夠用于實際應用。
[1]張大為,姜靜,樊理軍.新型LED驅動電源設計[J].機械與電子,2012,2.
[2]石烺峰,覃南鑫.提高LED驅動電源高效的應用[J].科技傳播,2012,5.
[3]羅全明,支樹播,蔣德高,周雒維.一種高可靠無源恒流LED驅動電源[J].電力自動化設備,2012,4.
[4]李傳偉.LED驅動電源可靠性設計研究[J].燈與照明,2011,3.
[5]Robert Kollman.高效率LED驅動電源設計[J].今日電子,2011,4.
[6]徐根達,趙合昌.一種高效大功率LED驅動電源設計[J].電源技術,2011,7.
[7]范俊杰,寧凡.LED驅動電源的現狀與展望[J].中國科技信息,2009,7.
[8]帥孟奇.LED驅動電源及其控制技術的研究與應用[J].今日電子,2011,4.
[9]黎平.LED驅動電源研究[D].重慶大學,2007.
[10]姜紅超.LED驅動電源的設計[D].華南理工大學,2011.
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
甘肅教育(2020年14期)2020-09-11 07:57:42
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
時代英語·高二(2015年1期)2015-03-16 00:08:11
中國衛生(2014年11期)2014-11-12 13:11:32
