基于PSO-BP神經網絡的PID控制器參數優化方法
2012-07-13 03:06:42郭珂,傘冶,朱奕
電子設計工程 2012年4期
郭 珂, 傘 冶, 朱 奕
(哈爾濱工業大學 黑龍江 哈爾濱 150001)
從1922年米諾爾斯基提出PID控制器至今,PID控制一直是自動控制領域中生命力最強、應用最為廣泛的基本控制方式。隨著科學技術的發展,涌現出越來越多新的先進控制方式,然而直到現在PID控制依然廣泛應用于機電、石油、化工、熱工、冶金等各個領域,尤其是底層的工業生產過程控制[1]。這是因為PID控制不僅具有算法原理簡單,穩定可靠,易于實現,適應能力強,對模型參數攝動具有較好的魯棒性等優點而且物理意義明確直觀易于理解[2]。PID控制系統的控制效果幾乎完全取決于控制器參數的選擇,因而其參數的整定和優化具有重要意義。
傳統整定優化方法有專家法、響應曲線法、Ziegler-Nichols法[3]、理想繼電特性法等。這些方法一般用于控制開始之前的PID參數離線預整定,雖然有一定的魯棒性,但對系統動態性能利用很少,因而設計出的控制器性能往往很難達到最優。而且整定后的參數通常不再改變,靈活性差,面對實際對象中存在的各種不確定性、非線性和復雜多變的工況就顯得無能為力了。因而人們對具有參數在線自整定功能的PID控制器提出了迫切需求,以適應復雜多變工況下的高性能指標的要求。隨著人工智能和機器學習理論的迅速發展,出現了許多智能參數整定優化方法并且取得了一定的效果,如模糊、遺傳算法、粒子群[4]、神經網絡等各種PID參數整定優化方法。其中,模糊PID控制系統性能的優劣取決模糊規則和隸屬度函數的選取,而這又嚴重依賴于設計者對控制回路特性知識了解的豐富程度。遺傳算法對搜索空間適應能力差,易出現早熟收斂,從而降低了PID參數尋優的效率。神經網絡由于具有自組織、自適應、自學習、魯棒性強且能夠以任意精度逼近任意非線性函數等優點,因而基于神經網絡的PID參數整定優化一直是PID控制研究的長期熱點問題之一。
針對傳統PID參數整定優化過程存在的問題,結合BP神經網絡自學習和自適應能力強等特點,提出采用BP神經網絡優化PID控制器參數。同時為了加快BP神經網絡學習收斂速度,防止其陷入局部極小點,提出采用粒子群優化算法來優化BP神經網絡的連接權值矩陣。最后,給出了一個PID控制系統的仿真實例來驗證本文所提算法的有效性。
1 PID控制的原理和數學描述
PID控制系統的基本結構如圖1所示。
PID控制器由比例、積分和微分3個環節組成,其數學描述如下:
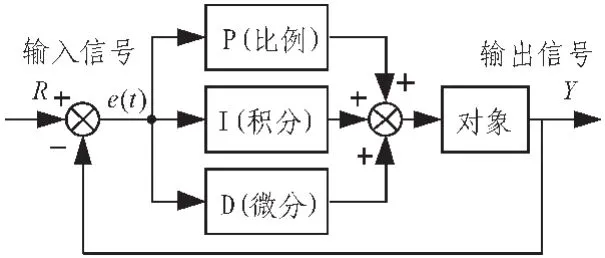
圖1 PID控制系統基本結構Fig.1 Basic structure of PID control system

式中,Kp為比例系數,Ti為積分時間常數,Td為微分時間常數。
比例環節即時成比例的反映偏差信號e(t),一有偏差控制器立即產生控制作用通過負反饋使之減小;積分環節用于消除靜差以提高系統的無差度;微分環節能反映偏差信號的變化趨勢,從而能在偏差信號變得太大之前在系統中引入一個提前修正信號,從而加快系統的調節速度。
隨著計算機控制技術的發展和廣泛應用,PID控制規律越來越多的采用數字PID來實現。數字PID通常采用的是增量式PID控制算法:

式中 Δe(k)=e(k)-e(k-1),
從式(2)可以看出,增量式PID控制算法的優點是計算量小,一旦確定Kp,Ki和Kd3個參數后,只要使用前后3次測量的偏差值就可以得到控制作用輸出

因而增量式PID控制要取得好的控制效果,就必須調從這3個參數變化無窮的組合中可以找出一組最佳參數。但是傳統整定方法面對復雜的實際被控對象所得到的系統性能指標往往欠佳,如超調量大、調節時間長。而目前得到廣泛應用的BP神經網絡能夠以任意精度逼近任意連續非線性函數,對于復雜不確定問題具有較強的自適應能力和自學習能力。
因此,將BP神經網絡技術與PID控制相結合,可以解決PID參數不易進行在線實時整定等方面的缺陷,更大程度上發揮PID控制的優點,從而使得控制系統具有更好的魯棒自適應能力。
2 粒子群優化算法優化的BP神經網絡
BP神經網絡由于其具有逼近任意非線性函數的能力,而且結構和學習算法簡單明確,因而可以采用BP神經網絡根據系統的狀態變化自動的調節優化PID控制器參數,從而實現某一指標要求下的最優。但是BP神經網絡在學習的過程中容易陷入局部極小點,而且有時會因為初始權值隨機選取不佳和學習速率大小選擇不當而導致收斂速度過慢。雖然有時一個局部極小點可以滿足基本性能指標的要求,但這樣會使得系統無法工作在最佳狀態,從而影響整個控制系統的高效穩定運行。正是由于BP神經網絡的這些不足之處限制了其在PID控制器參數優化中的廣泛應用。粒子群優化算法(PSO)是一種全局搜索算法,其收斂速度快,算法簡單易于實現,用它來優化神經網絡的連接權值,可以較好地克服BP神經網絡的上述不足之處,從而提高神經網絡的收斂速度和學習能力。圖2給出了基于PSO-BP神經網絡優化PID參數的結構原理圖。

圖2 神經網絡PID系統構成圖Fig.2 PID control system based on neural networks
2.1 BP神經網絡
BP神經網絡是應用最為廣泛的一種前饋網絡,通常由輸入層、隱含層、輸出層構成,隱含層可以有多層,層與層之間通過權矩陣聯接[5-6]。其一般網絡結構如圖3所示。

圖3 BP神經網絡結構圖Fig.3 Structure diagram of neural networks
從圖3中可看到,BP神經網絡的輸入矢量為x∈Rn,x=(x1,x2,…,xn)T,輸出矢量為y∈Rm,y=(y1,y2,…,xm)T,隱層共有h個神經元。設輸入層和隱層之間的連接權矩陣為W1,隱層和輸出層之間的權矩陣為W2,于是各層神經元的輸出為:

上兩式中,f(·)通常選為Sigmoid函數。
2.2 粒子群優化算法
粒子群算法[7]的數學描述如下:
假定一個由M個粒子組成的群體在D維搜索空間中以一定速度飛行,其中第i個粒子的位置和速度分別表示為Xi=(xi1,xi2,…,xid)和Vi=(vi1,vi2,…,vid)。用pi=(pi1,pi2,…,pin)表示粒子自身迄今為止找到的最優解,pg=(pg1,pg2,…,pgn)表示整個種群迄今為止找到的最優解。粒子在找到和之后通過如下規則來更新自己的狀態:


式中,r1和r2為介于之間的隨機數;c1和c2為加速常數,它們表示粒子受社會知識和個體認知的影響程度,通常設為相同值。w為慣性權重因子,用于均衡粒子的全局探索能力和局部開發能力;和分別為粒子i在第t次迭代中第d維的速度和位置;為粒子i在第d維的個體極值位置,為群體在第d維的全局極值位置。Clerc[8]提出c1=c2=2.05,而Trelea[9]推導出w=0.6,c1=c2=1.7時PSO算法的性能最佳,本文就采用這組參數,同時通過實驗粒子數選為20,因為粒子數太少則搜尋空間有限,太多則顯得效率低下。
2.3 粒子群優化BP神經網絡權值
BP神經網絡的權值按照一定次序編碼為粒子群中的一個粒子,而把BP神經網絡的目標函數作為PSO算法的適應度函數,通過PSO算法的循環迭代來最終找到最佳的網絡權值。
采用PSO訓練BP網絡需要確定如下4個問題。
1)BP神經網絡結構確定
BP神經網絡的輸入節點個數和輸出節點個數是由實際問題本身決定的,如在本文所研究的PID控制器參數優化問題中輸入節點數個輸出節點數均為3個。因而BP神經網絡結構設計重點就在于隱層結構的確定,具體包括隱層個數和各隱層節點個數。隱層的結構很大程度上決定著網絡的記憶容量、泛化能力、訓練速度和輸出響應的質量。由萬能逼近定理可知,三層網絡已經能逼近任意非線性函數,因而本文選用具有單隱層的三層BP網絡。隱層節點數的選擇與問題的復雜程度有關,隱層節點過少,學習可能不收斂,網絡的知識能力和泛化能力降低。但隱節點過多,往往偏向于冗余,訓練時間不收斂,不但使參數增多而增加了學習時間,而且可能使泛化能力降低,從而使整體性能變壞。本文通過經驗公式和實驗分析后選取隱層節點數為8個。

式中,為隱層節點數,為輸入節點數,為輸出節點數,為之間的常數。
2)編碼策略的選取
采用PSO優化BP神經網絡首先應該將網絡中的權值矩陣進行編碼,編碼方式可以分為向量編碼策略和矩陣編碼策略兩種。文中采用向量編碼策略,每個粒子都被編碼成為一個向量,這個向量由一個神經網絡的所有權值按照一定規律排列而成。
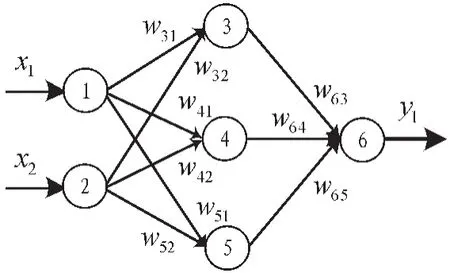
圖4 神經網絡向量編碼策略Fig.4 Vector coding strategy for neural networks
圖4示意性給出了本文所用編碼方式,具體編碼方式為 :particle(i)=[w31,w32,w41,w42,w51,w52,w61,w62,w63],式 中 ,i代表粒子個數,i=1,2,…,M。
3)適應度函數的選取
編碼策略確定以后,就可以將BP網絡的權值相應的映射為粒子的維數形式,并根據式(4)和(5)進行網絡訓練。在訓練過程中,適應度函數即目標函數選為:

4)算法終止條件的選取
算法終止條件的選取必須同時兼顧算法的學習精度和速度,通常為達到所要求的適應度
閾值或者達到預先設定的最大迭代次數。
具體算法流程圖如圖5所示。
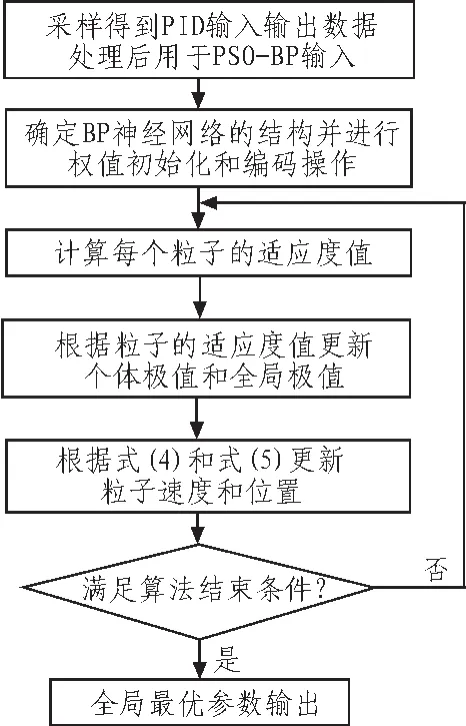
圖5 PSO-BPNN優化PID參數流程圖Fig.5 Flow chart of PID controller parameters optimization
3 仿真算例
為了驗證本文所提方法的有效性,選定被控對象的數學模型如下:


圖6 系統階躍響應對比曲線Fig.6 Comparison of step response curves
圖6給出了采用本文所提方法和基于整定方法、方法、方法得到的PID控制系統的階躍響應曲線。從圖中可以看出,本文提出的PSO-BP優化整定方法同其他3種整定方法相比,閉環控制系統的超調量和調節時間明顯減小,綜合性能指標是4種方法中最好的。
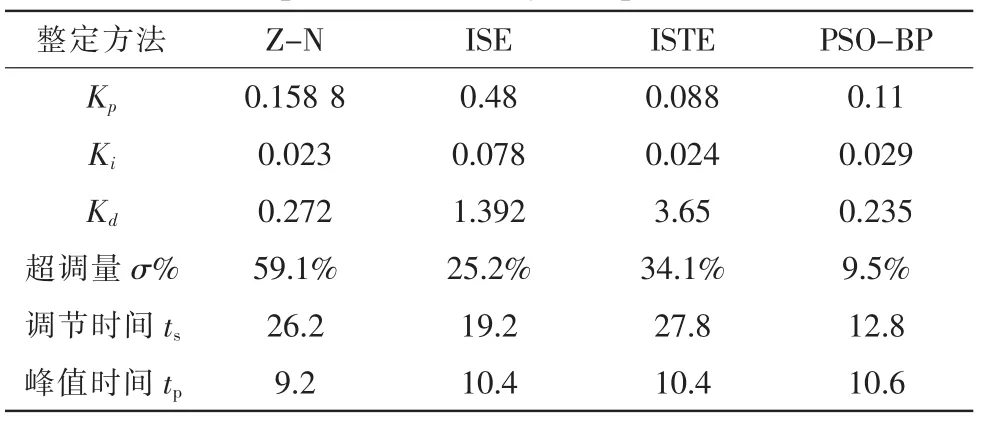
表1 PID參數及系統性能指標Tab.1 PID parameters and system performance index
表1詳細給出了4種整定方法所得PID控制器參數及系統具體性能指標,通過對比分析可以得到,文中所提方法得到的PID控制器控制品質是最好的,從而驗證了該方法是一種有效的PID參數整定方法。
4 結 論
傳統PID控制器參數整定方法是嚴格基于數學模型的,因此對于具有時變、非線性的復雜被控對象很難取得滿意效果。針對常規Ziegler-Nichols等常規PID整定方法的不足之處,文中提出了采用PSO-BP神經網絡[10]的參數整定優化方法,并通過一個三階模型進行了仿真驗證。仿真結果表明,本文所提算法得到的PID控制器綜合性能明顯優于幾種常規整定方法得到的PID控制器,是一種有效的PID參數整定優化方法。
[1]劉金琨.先進PID控制MATLAB仿真[M].3版.北京:電子工業出版社,2011.
[2]Knospf C.PID control[J].IEEE Control System Magazine,2006,26(1):30-31.
[3]Astrom K J,Hagglund T.Revisiting the Ziegler-Nichols step response method for PID control[J].Journal of Process Control,2004,14(6):635-650.
[4]任子武,傘冶.改進PSO算法及在PID參數整定中的應用研究[J].系統仿真學報,2006,18(10):2870-2873.
REN Zi-wu,SAN Ye.Improved particle swarm optimization and its application research in tuning of PID parameters[J].Journal of System Simulation,2006,18(10):2870-2873.
[5]叢爽,梁艷陽,李國棟.多變量自適應PID型神經網絡控制器及其設計方法[J].信息與控制,2006,10(5):568-569.
CONG Shuang,LIANG Yan-yang,LI Guo-dong.Multivariable adaptive PID-like neural network controller and its design method[J].Information and Control,2006,10(5):568-569.
[6]李士勇.模糊控制·神經控制和智能控制論[M].哈爾濱:哈爾濱工業大學出版社,1998:92-94.
[7]Kennedy J,Eberhart R.Particle swarm optimization[C].IEEE InternationalConferenceonNeuralNetworks,1995:1942-1948.
[8]Clerc M,Kennedy J.The particle swarm:explosion stability and convergence in a multi-dimensional complex space[J].IEEE Transaction on Evolutionary Computation,2002,6(1):58-73.
[9]TreleaI.Theparticleswarmoptimizationalgorithm:convergence analysis and parameter selection[J].Information Processing Letters,2003,85(6):317-325.
[10]季盛強,紀海英,辛曉虎,等.幾種特征選擇方法在局部放電模式識別中的應用[J].陜西電力,2011(11):1-4,9.
JI Sheng-qiang,JI Hai-ying,XIN Xiao-hu,et al.Application of several feature selection methods in partial discharge pattern recognition[J].Shaanxi Electric Power,2011(11):1-4,9.
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56