基于腕力傳感器的繩驅(qū)動擬人臂的力/位混合控制研究
2012-07-14 07:57:50唐振山陳偉海
中國測試 2012年4期
關(guān)鍵詞:環(huán)境
唐振山,陳偉海
(北京航空航天大學(xué)自動化科學(xué)與電氣工程學(xué)院,北京 100191)
0 引 言
繩驅(qū)動擬人臂樣機(jī)是一種串并聯(lián)混合結(jié)構(gòu),樣機(jī)由并聯(lián)驅(qū)動肩關(guān)節(jié)、鍵驅(qū)動肘關(guān)節(jié)和并聯(lián)驅(qū)動腕關(guān)節(jié)組成[1],采用鋼絲繩代替連桿作為驅(qū)動元件并將驅(qū)動電機(jī)安裝于基座上。它結(jié)合了并聯(lián)結(jié)構(gòu)高剛度、高精度、高負(fù)載能力和繩驅(qū)動結(jié)構(gòu)重量輕、靈活性好的優(yōu)點(diǎn),會在廣泛的領(lǐng)域擁有較好的應(yīng)用前景。但由于繩索固有的柔性[2],機(jī)構(gòu)安裝的初始定位誤差、電機(jī)卷揚(yáng)機(jī)構(gòu)纏繞誤差的存在,導(dǎo)致這種非直接驅(qū)動系統(tǒng)在任務(wù)空間的開環(huán)精度和剛度較低,從而使其在微操作或精度要求較高場合的應(yīng)用受到了限制。本文采用3個相交于一點(diǎn)的單軸機(jī)構(gòu)來實(shí)現(xiàn)自由度球關(guān)節(jié)的功能,通過安裝在關(guān)節(jié)處的角度傳感器,實(shí)現(xiàn)高精度的位置控制。
機(jī)器人在從事裝配、打磨、拋光及輪廓跟蹤等任務(wù)時,不但需要高精度的位置控制,還需要實(shí)時的控制其與環(huán)境之間的接觸力,本文主要是在阻抗控制[3]算法的基礎(chǔ)上進(jìn)行位置控制和力控制。
1 運(yùn)動學(xué)模型分析
繩驅(qū)動擬人臂的示意圖如圖1所示,由3個關(guān)節(jié)組成,即3-DOF的并聯(lián)肩關(guān)節(jié)、1-DOF的肘關(guān)節(jié)、3-DOF的并聯(lián)腕關(guān)節(jié)。建立如圖1的坐標(biāo)系,基坐標(biāo)系為{Ko},肩關(guān)節(jié)坐標(biāo)系為{Ks},肘關(guān)節(jié)坐標(biāo)系{Ke},腕關(guān)節(jié)坐標(biāo)系為{Kw},末端操作手坐標(biāo)系{KT}。
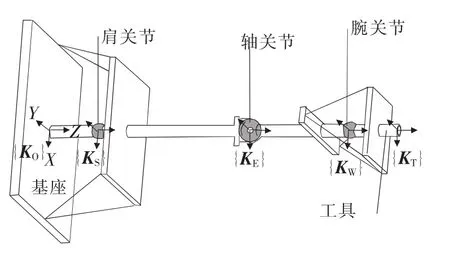
圖1 七自由度擬人臂示意圖
機(jī)械臂的前向運(yùn)動學(xué)公式為

式中:{TOS},{TSE},{TEW},{TWF}——肩關(guān)節(jié)坐標(biāo)系相對基坐標(biāo)系,肘關(guān)節(jié)坐標(biāo)系相對肩關(guān)節(jié)坐標(biāo)系,腕關(guān)節(jié)坐標(biāo)系相對肘關(guān)節(jié)坐標(biāo)系及工具坐標(biāo)系相對腕關(guān)節(jié)坐標(biāo)系的變化矩陣,它們分別如式(2)~式(5)所示
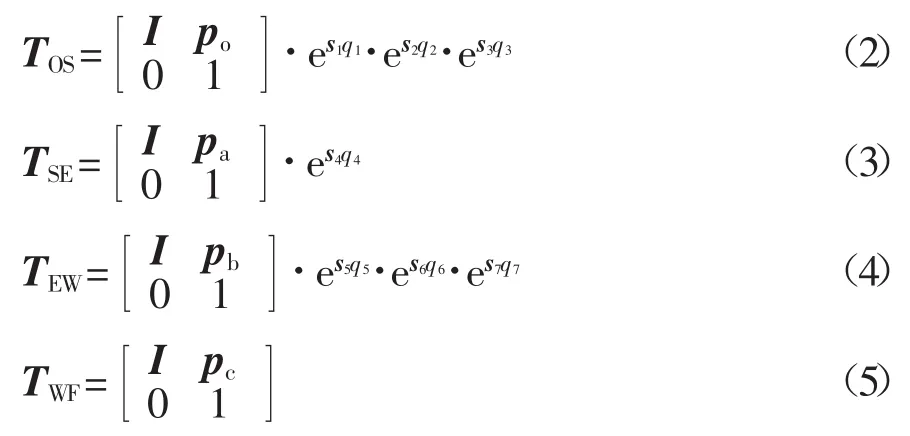
式中:po,pa,pb,pc——關(guān)節(jié)之間連桿的長度;
q1,q2,q3——肩關(guān)節(jié)姿態(tài)的歐拉角;
q4——肘關(guān)節(jié)的角度;
q5,q6,q7——腕關(guān)節(jié)姿態(tài)的歐拉角;
s1,s2,s3,s4,s5,s6,s7——7個關(guān)節(jié)角對應(yīng)的7個旋量[4]。
2 阻抗模型分析
阻抗控制中的阻抗包括操作機(jī)物理上內(nèi)在的阻抗和采用主動控制帶來的阻抗兩部分。操作機(jī)物理上內(nèi)在的阻抗是不變的,阻抗控制的目的就是通過選用主動控制參數(shù)來實(shí)現(xiàn)理想的目標(biāo)阻抗。阻抗控制中,阻抗可以為任意的函數(shù)形式:f=Z(x),但考慮到實(shí)現(xiàn)的可能,采用式(6)的2階線性阻抗[5]

Md∈R3×3,Bd∈R3×3——系統(tǒng)的理想質(zhì)量矩陣和阻尼矩陣;
F∈R3——工具與環(huán)境的接觸力向量;
Kf∈R3×3——力反饋增益矩陣;,F(xiàn)d——末端操作手理想的速度向量,加速度向量和作用力向量;
Md,Bd,Kf均設(shè)定為正定的對角陣。

由式(7)可解得
X=e-Md-1BdtX(0)+

為了進(jìn)行實(shí)際控制,把式(8)進(jìn)行離散化處理,采樣時間為 Δt,假設(shè) Md,Bd,Kf,F(xiàn) 和 Fd在采樣間隔 Δt·(k-1)≤t<Δt·k 是連續(xù)的,令,則式(8)可變換為

式中:Ki∈R3×3——正定對角的積分增益矩陣。
3 軌跡規(guī)劃
3.1 標(biāo)準(zhǔn)環(huán)境的軌跡規(guī)劃
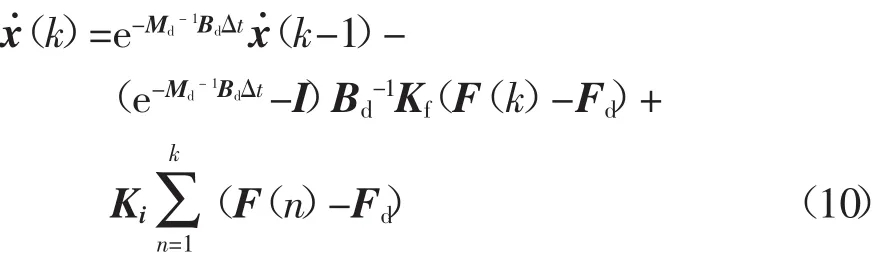
當(dāng)環(huán)境能精確建模時,如圖2所示,采用解析的方式得到環(huán)境的信息,從而得到機(jī)器人的準(zhǔn)確參考軌跡。例如末端跟蹤的軌跡為圖2所示的X_Y平面中圓心為B的圓弧時,令機(jī)器人末端操作手的法向量平行于Z軸,即垂直于X_Y平面,用式(11)參數(shù)方程進(jìn)行軌跡建模
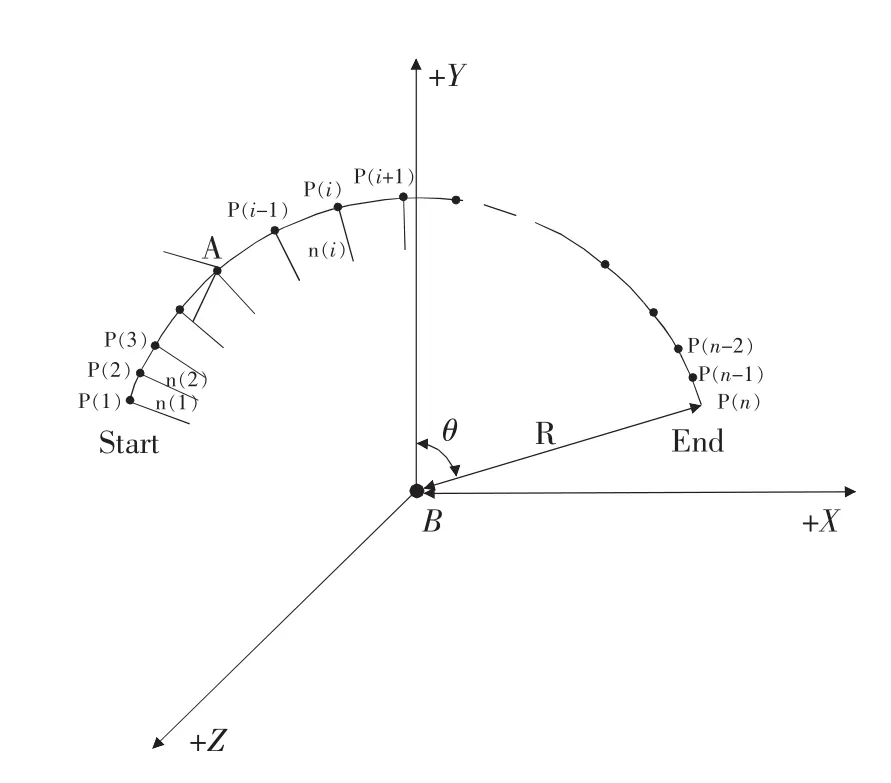
圖2 X-Y平面上的圓弧軌跡

式中:R——圓弧半徑;
θ——圓弧上點(diǎn)對應(yīng)的角度值。
假設(shè)機(jī)器人末端執(zhí)行器做圓弧運(yùn)動時,角速度曲線為加速、勻速、減速的梯形曲線,加速、減速時間為Ta,總時間為T,則最大角速度為

式中:θ0——整個圓弧對應(yīng)的角度。
最大角加速度為

可得角速度方程為
為了進(jìn)行數(shù)字控制,把式(14)離散化,設(shè)采樣時間為 Δt,令

軌跡方程變換為
式中:n——采樣點(diǎn)數(shù)。
可得末端的位置向量為

設(shè)末端的姿態(tài)保持不變一直為Ra∈R3×3,則末端的位置可以表示為
3.2 未知環(huán)境軌跡規(guī)劃
當(dāng)機(jī)器人與一些環(huán)境比如平面、圓弧面等標(biāo)準(zhǔn)環(huán)境接觸時,環(huán)境一般能被精確建模,環(huán)境的每一點(diǎn)的切向和法向能通過理論計(jì)算得到;但當(dāng)機(jī)器人與未知環(huán)境發(fā)生接觸時,例如對不規(guī)則物體的表面打磨、輪廓跟蹤等,機(jī)器人末端的參考運(yùn)動軌跡并不能提前給定,這時就需要通過力、位置等反饋信息進(jìn)行在線軌跡規(guī)劃,根據(jù)當(dāng)前點(diǎn)的位置和與環(huán)境作用力進(jìn)行在線計(jì)算得到下一點(diǎn)的參考值[6]。
當(dāng)機(jī)器人與未知環(huán)境接觸時,如圖3所示,F(xiàn)x與Fy為安裝機(jī)器人末端的多維力傳感器測得的與環(huán)境之間的接觸力,p為垂直于運(yùn)動方向的單位法向量,w和t分別為工具與環(huán)境接觸點(diǎn)處的單位法向量和切向量,忽略工具與環(huán)境之間的摩擦[7]。
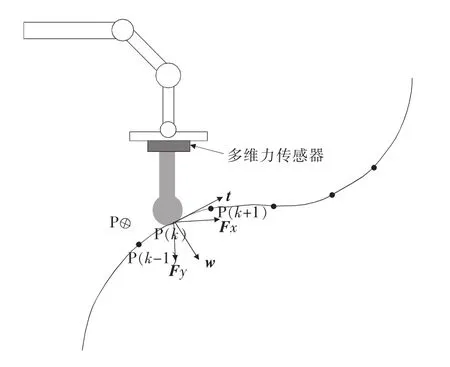
圖3 不確定性環(huán)境下的軌跡模型
w和t可由式(19)得出

由于安裝在末端的力傳感器上工具坐標(biāo)系為動坐標(biāo)系,從而測得的多維力信息需要一定的矩陣變換才能得到未知環(huán)境的信息。

式中:Re——當(dāng)前點(diǎn)的末端的姿態(tài)矩陣;
F′——力傳感器測得的力向量;
F——相對于全局坐標(biāo)系的力向量。
當(dāng)末端操作手運(yùn)動到 P(k)點(diǎn)時,P(k+1)點(diǎn)的位置信息可通過式(21)計(jì)算得到

4 位置控制算法
擬人臂在任務(wù)空間的定位操作是實(shí)現(xiàn)擬人臂各種復(fù)雜運(yùn)動的基礎(chǔ),只有樣機(jī)的位置控制精度達(dá)到要求,軌跡跟蹤、微動等任務(wù)才能快速順利完成。實(shí)際中樣機(jī)模型參數(shù)的準(zhǔn)確性很大程度上影響了末端執(zhí)行器的定位精度,樣機(jī)在加工和裝配過程中,間隙、回差、非垂直連接等因素,加之繩索本身的柔性,都導(dǎo)致系統(tǒng)精度的降低。為了消除各種不確定因素帶來的誤差,采用關(guān)節(jié)角閉環(huán)控制的方式,這樣可以不必對每個誤差源進(jìn)行建模并補(bǔ)償消除,直接通過PID控制進(jìn)行每個關(guān)節(jié)的控制。樣機(jī)由3個關(guān)節(jié)構(gòu)成:2個三自由度的球關(guān)節(jié)和1個一自由度的肘關(guān)節(jié),球關(guān)節(jié)是1個多輸入多輸出的耦合結(jié)構(gòu),底層驅(qū)動由4個伺服電機(jī)完成。伺服電機(jī)的一個缺點(diǎn)是輸入命令為電機(jī)的相對或絕對位置,需要根據(jù)關(guān)節(jié)誤差實(shí)時的改變每個電機(jī)的最終位置,但由于耦合關(guān)節(jié)非線性的因素及繩索彈性的影響,并不能確定電機(jī)的最終位置,這樣傳統(tǒng)的PID控制器不能順利完成,為此提出了一種改進(jìn)的PD算法。
底層電機(jī)控制采用了一種可以在電機(jī)運(yùn)動中改變目標(biāo)位置的技術(shù),如圖4所示,這種技術(shù)避免了電機(jī)不同運(yùn)動之間的停頓(圖5),使運(yùn)動速度更加平滑。這種技術(shù)是首先給定電機(jī)一個虛擬目標(biāo)位置點(diǎn),在沒有到達(dá)這個位置點(diǎn)的過程中,實(shí)時監(jiān)測關(guān)節(jié)處編碼器的反饋值,通過解耦計(jì)算實(shí)時地修正這個虛擬目標(biāo)點(diǎn),采樣時間為10ms,這樣在一個運(yùn)動過程中,一般為幾百毫秒到幾秒,足以把個各種誤差消除到理想范圍內(nèi),之后的實(shí)驗(yàn)也表明算法的有效性。
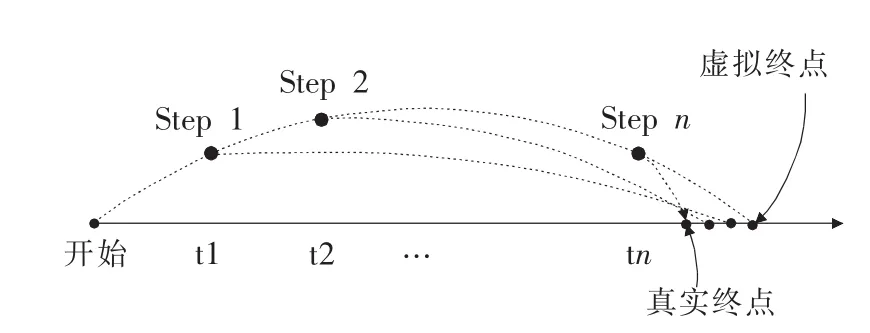
圖4 改進(jìn)的PD算法示意圖
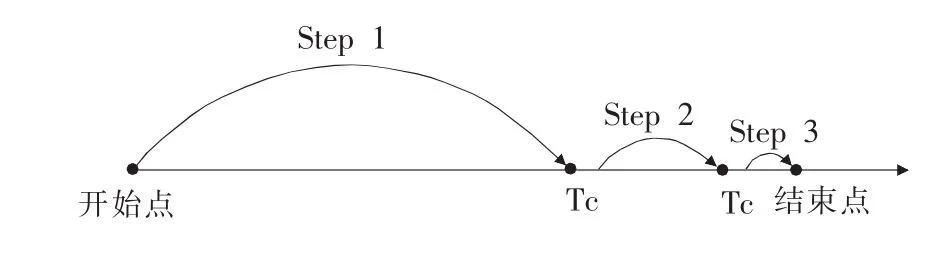
圖5 傳統(tǒng)的控制算法示意圖
5 實(shí) 驗(yàn)
為了得到較好的控制效果,運(yùn)用類似于生物驅(qū)動機(jī)制的分級控制系統(tǒng)作為控制器,分級控制系統(tǒng)框圖如圖6所示。
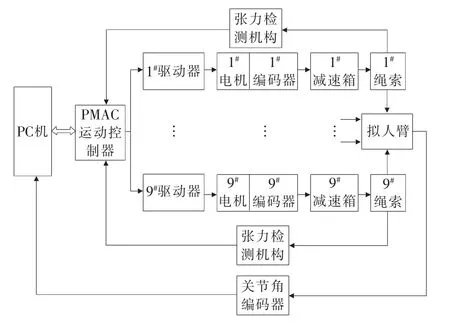
圖6 控制系統(tǒng)整體框圖
本文在樣機(jī)控制系統(tǒng)的基礎(chǔ)上進(jìn)行實(shí)驗(yàn)來驗(yàn)證算法的正確性:
實(shí)驗(yàn)一:擬人臂各個關(guān)節(jié)從初始位置運(yùn)動到給定的角度,設(shè)定值如下:肩關(guān)節(jié)的歐拉角Z_1、Y_1、X_1 分別為 10°、15°、20°,肘關(guān)節(jié)角度 M 為 60°,腕關(guān)節(jié)的歐拉角為 15°、15°、15°,運(yùn)動過程中實(shí)時監(jiān)測關(guān)節(jié)角的角度值并繪制成曲線,如圖7,圖8,圖9所示,可見機(jī)器人各關(guān)節(jié)定位精度均達(dá)到碼盤的分辨率0.18°以內(nèi),采用上面閉環(huán)控制算法得到的精度是滿足系統(tǒng)要求的。
實(shí)驗(yàn)二:使機(jī)器人在X_Y平面內(nèi)繪制一條規(guī)劃好的曲線,曲線跟蹤算法采用的是自學(xué)習(xí)算法,結(jié)果如圖10所示,可以看出機(jī)械臂對于空間規(guī)劃的曲線具有很高的跟蹤能力,位置精度較高[8]。
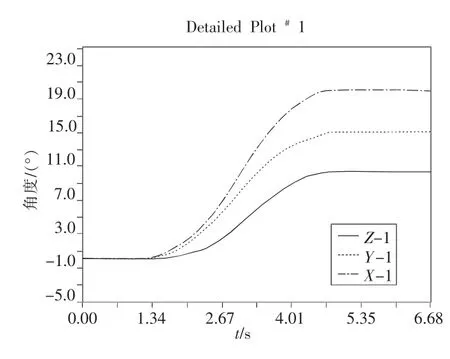
圖7 肩關(guān)節(jié)角度響應(yīng)曲線
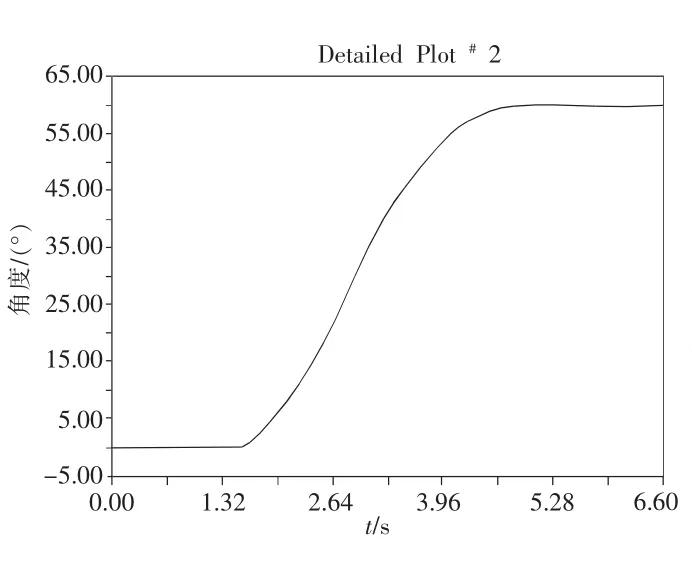
圖8 肘關(guān)節(jié)角度響應(yīng)曲線
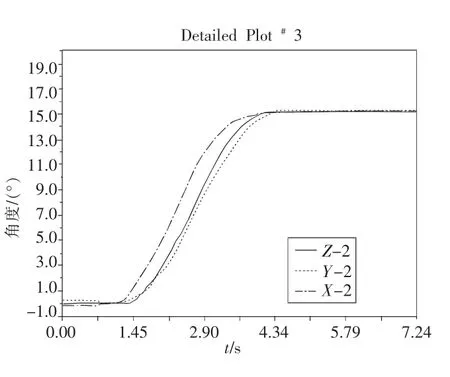
圖9 腕關(guān)節(jié)角度響應(yīng)曲線
6 仿真
采用式(22)計(jì)算力傳感器信號:

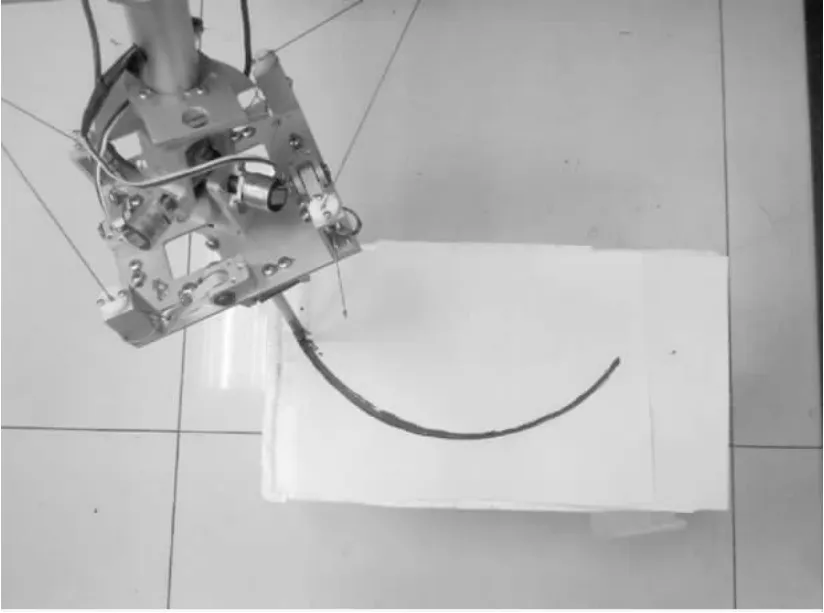
圖10 圓弧軌跡
其中noise為傳感器噪聲,為與工具末端與環(huán)境z坐標(biāo)的差值,設(shè)定環(huán)境剛度為Km=40N/mm,反饋力增益矩陣:積分矩陣取環(huán)境作用力Fd設(shè)定為Fd=[0 0 10]N,采用阻抗模型進(jìn)行控制仿真得到圖11與圖12中的曲線。
從圖12中的力響應(yīng)曲線可以看出,阻抗控制算法能快速地實(shí)現(xiàn)力跟蹤并且具有較高的跟蹤精度,Z方向上的位置在參考位置的基礎(chǔ)上產(chǎn)生一定的偏差來滿足接觸力控制的要求,通過位置和力之間的這種動態(tài)關(guān)系調(diào)節(jié),實(shí)現(xiàn)了系統(tǒng)的力/位混合控制。
7 結(jié)束語
(1)在一種具有關(guān)節(jié)角反饋的繩驅(qū)動擬人臂樣機(jī)的基礎(chǔ)上,利用關(guān)節(jié)角反饋信息提出一種適合耦合球關(guān)節(jié)的閉環(huán)控制算法,克服了繩驅(qū)動技術(shù)多種誤差源不能建模的問題,提高了整機(jī)的運(yùn)動精度。
(2)結(jié)合多維力傳感器提出了一種基于阻抗控制的力控制算法,并在此基礎(chǔ)上進(jìn)行了仿真實(shí)驗(yàn),驗(yàn)證了阻抗模型的正確性。
(3)對機(jī)器人的兩種不同的任務(wù)環(huán)境進(jìn)行分析,并利用多維力傳感器對環(huán)境信息進(jìn)行估計(jì)與建模,在此基礎(chǔ)上對所要實(shí)施的任務(wù)進(jìn)行了軌跡規(guī)劃。
(4)采用基于PC+PMAC分級控制器系統(tǒng)實(shí)現(xiàn)控制系統(tǒng),有效利用了PC資源豐富、開發(fā)調(diào)試和運(yùn)動控制器實(shí)時運(yùn)算能力強(qiáng)的優(yōu)點(diǎn),同時系統(tǒng)具有很好的開放性和可擴(kuò)展性。
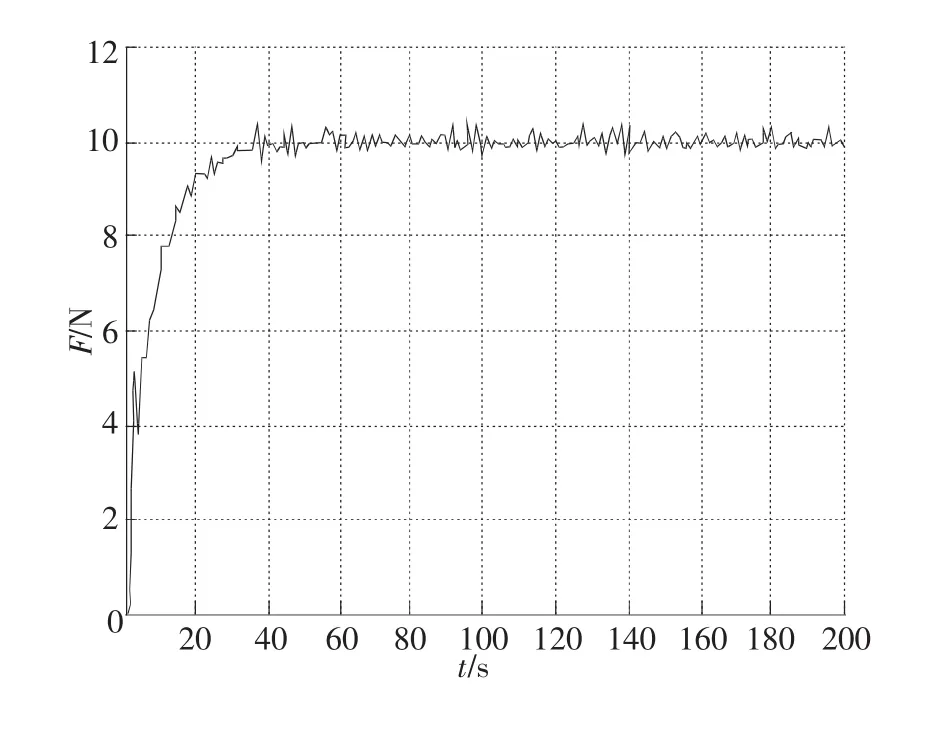
圖11 接觸力響應(yīng)曲線
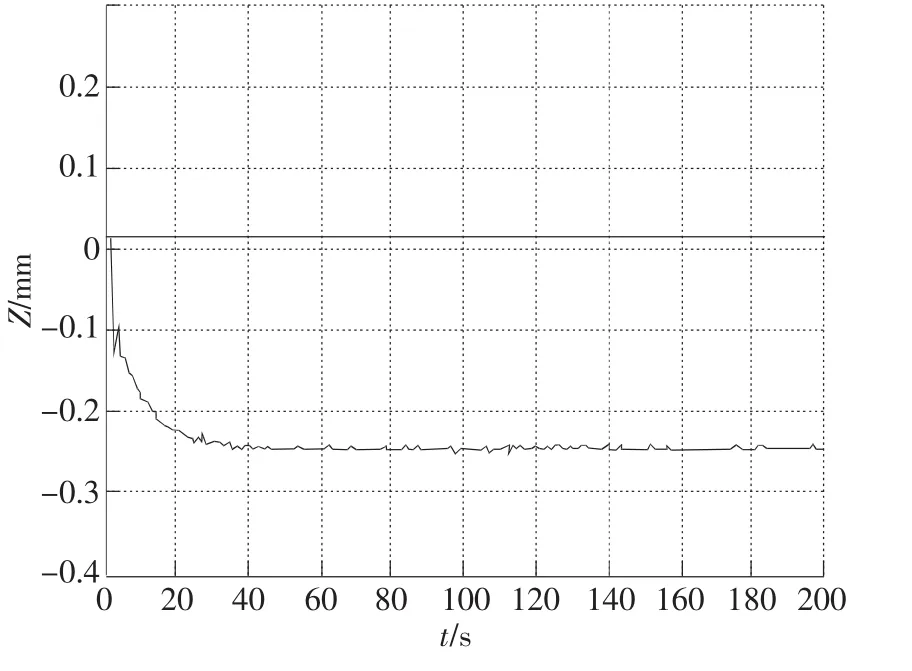
圖12 Z方向位置響應(yīng)曲線
[1]陳泉柱.繩驅(qū)動擬人臂機(jī)器人的機(jī)構(gòu)設(shè)計(jì)與運(yùn)動學(xué)研究[D].北京:北京航空航天大學(xué),2006.
[2]王洪光,趙明揚(yáng),郭立新,等.一種柔索驅(qū)動并聯(lián)機(jī)構(gòu)及其運(yùn)動學(xué)分析[J].機(jī)器人,2002,24(7):634-636.
[3]Hogan N.Impedance control,an approach to manipulation[C]∥American Control Conference.1984:304-314.
[4]John J.Craig,贠超.機(jī)器人學(xué)導(dǎo)論[M].3版.北京:機(jī)械工業(yè)出版社,2006:136-150.
[5]Fusaomi Nagata, Tetsuo Hase,Zenku Haga,et al.Watanabe CAD/CAM based position/force controller for a mold polishing robot[J].Mechatronics,2007(17):207-216.
[6]喬兵,吳洪濤,朱建英,等.面向位控機(jī)器人的力/位混合控制[J].機(jī)器人,1999,21(7):7.
[7]Yu K G,Kieffer J.Robotic force velocity control for followingunknown contours,ofgranularmaterials[J].Control Engineering Practice,1999(7):1249-1256.
[8]Burdet E,Rey L,Codourey A.A trivial and efficient learning method for motion and force control[J].Engineering Applications of Artificial Intelligence,2001(14):487-496.
猜你喜歡
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學(xué)學(xué)報(自然科學(xué)版)(2021年1期)2021-06-09 08:43:00
中國生殖健康(2020年6期)2020-02-01 06:28:50
新世紀(jì)智能(英語備考)(2019年12期)2020-01-13 06:07:18
瘋狂英語·新策略(2019年9期)2019-10-17 01:51:34
中國生殖健康(2019年11期)2019-01-07 01:28:02
中國生殖健康(2018年6期)2018-11-06 07:09:28
濰坊學(xué)院學(xué)報(2017年2期)2017-04-20 08:44:31
中國環(huán)境監(jiān)察(2016年5期)2016-10-24 05:25:52
中國商論(2016年33期)2016-03-01 01:59:38
