汽車防抱死制動系統H∞控制與P ID控制的比較研究
2012-07-19 07:12:48嚴運兵榮銳兵蔡嘯霄
汽車科技 2012年5期
吳 浩,嚴運兵,方 圓,榮銳兵,蔡嘯霄
(武漢科技大學 汽車與交通工程學院,武漢 430081)
汽車在緊急制動過程極易出現很多危險的現象,例如側滑、跑偏、失去轉向操縱能力等,進而導致了相當多的交通事故。這些危險的現象都是由于汽車制動時車輪抱死產生的,因而考慮汽車制動安全性而研制出來的汽車防抱死制動系統就具有重要的作用。汽車防抱死制動系統 (簡稱ABS,即Antilock Braking System)是一種主動安全裝置,能夠防止汽車在制動時車輪完全抱死,從而起到縮短制動距離、增強車輛穩定性和轉向操縱性的作用。
如圖1所示為汽車ABS系統的工作原理。汽車防抱死制動系統通常由傳感器、電控單元(ECU)和執行器(液壓調節器)三部分組成。車輛制動時,電控單元接收來自傳感器的車速和輪速信號,經過運算和處理后向執行器(液壓調節器)發送控制信號,然后執行器會通過調節制動器液壓來實現車輪制動力的動態調節,進而實現防止車輪抱死的功能。
控制方法是ABS的核心技術,掌握控制方法的設計和匹配,對于自主開發ABS和進一步開展汽車主動安全性理論和技術研究有著重要的現實意義[1]。目前,國內外對ABS的控制方法進行了很多研究,其中在實際中應用的較為廣泛是邏輯門限控制,它對于非線性系統是一種有效的控制方法,但是在選擇門限值、車速估計及路面識別上存在困難[1]。也有采用 PID、模糊、滑模變結構等控制方法的[3-5],但一般都通過單一的控制方式來實現,因此往往很難兼顧控制的魯棒性、精度和穩定性。對于ABS這樣一種非線性和參數不確定性的系統,必須要考慮控制器的魯棒性能。因此本文在建立防抱死制動系統數學模型的基礎上,設計了 H∞控制算法,并與基于傳統PID控制的ABS系統進行比較研究。
1 ABS數學模型
本文以單輪車輛系統模型為研究對象,為了便于分析,在研究汽車制動防抱死系統時作了如下簡化:(1)車輪承受的載荷為常數;(2)忽略空氣阻力和滾動阻力的影響。
汽車防抱死制動系統的數學模型由車輛動力學模型、輪胎模型、制動系統模型、滑移率計算模型和控制器模型5部分組成。其中,控制器模型是依據其他4個模型進行設計的。
1.1 車輛動力學模型
本文對車輛動力學模型進行了簡化,采用的車輪動力學模型為單輪車輛模型。因為此模型描述的是制動性能,適合于汽車防抱死制動系統性能的分析。車輛受力分析如圖2所示。
由圖2可得車輛動力學方程:車輛運動方程:
車輪運動方程:
車輛縱向摩擦力:
式中:M為1/4車輛的質量,kg;v為車輛行駛速度,m/s;F 為縱向摩擦力,N;I為車輪的轉動慣量,kg·m2;w為車輪角速度,rad/s;R 為車輪行駛半徑,m;Tb為制動器制動力矩,N·m;μ為縱向附著系數;N為地面支持力,N。
1.2 輪胎模型
輪胎模型是指制動過程中輪胎附著力和其它各種參數之間的函數關系式,通常用輪胎附著系數與各種參數的函數關系式來表示。本文采用比較常用且相對精確的魔術公式來描述輪胎模型[5]。用魔術公式模型來模擬制動時車輪縱向附著系數和車輪滑移率之間的關系為:
式中:μ為縱向附著系數;f相當于車輪在純滾動時附著系數,一般情況下設為0;D、C、B、E都是與路面有關的常數,通過改變這些參數可模擬不同路面的附著系數。本研究擬進行干瀝青路面上的ABS系統的仿真,選取的相關常數為:D=0.85;C=2.4;B=6.0;E=0.9。
1.3 制動系統模型
制動器模型指制動器力矩與制動系氣液壓力之間的關系模型。為了便于對控制過程的仿真研究,在進行仿真時假設制動器為理想元件,認為其非線性特性較弱并忽略了其滯后帶來的影響。因此,制動器方程為:
1.4 滑移率計算模型
汽車制動時,如果車輪線速度wR低于汽車行駛速度v時,輪胎和路面之間將產生滑移,此時滑移的程度常用滑移率表示,其計算公式為:
2 H∞魯棒控制設計
ABS系統在實際使用時,往往會因為外界的擾動,如汽車質量會因載重量的不同而發生變化,制動器因磨損會使得制動效能下降,輪胎氣壓以及路面條件等因素也經常發生變化,從而使得被控系統存在不確定性。這就需要在考慮不確定性的基礎上,設計出能在一定程度上抑制擾動的魯棒控制器。
2.1 ABS數學模型簡化
借鑒文獻[2]的模型簡化方法,對ABS系統數學模型進行簡化,得到系統狀態方程為:
輸出方程為:
本研究采用的汽車模型基本參數為:設期望滑移率為0.2;制動初始車速為20 m/s;車輪滾動半徑R為0.287 m;單輪汽車質量M為725 kg;車輪轉動慣量 I為 0.405 kg·m2; 制動器效能因數 Kt為 500;重力加速度g為10 m/s2;時間常數Tp為0.5。代入仿真參數,并將式(7)、(8)轉換成傳遞函數形式,得系統的傳遞函數:
2.2 基于混合靈敏度的H∞控制設計
H∞魯棒控制理論是在H∞空間(即Hardy空間)通過某些性能指標的無窮范數優化而獲得具有魯棒性能的控制器的一種理論[7]。混合靈敏度問題是H∞控制的最典型問題之一,應用H∞方法設計系統,為了保證魯棒性和提高系統性能,通常將設計問題轉化為混合靈敏度問題。H∞混合靈敏度控制就是指在頻域內選擇加權函數 W1、W2、W3,使之滿足:
式中:S和T分別為靈敏度函數和補靈敏度函數。
根據ABS系統的標稱模型(式9),進行加權函數的選擇[8-9],并使用 Matlab 中的魯棒工具箱進行仿真實踐,最后選取的加權函數為:W1(s)=100/(s+1);W2=0.00005; W3(s)=s/(s+1000)。 在 MATLAB環境下,對ABS系統的標稱模型進行加權,并使用hinf命令求解H∞控制器,結果為一個四階模型[10-11]:
3 ABS系統動態仿真和結果比較分析
為達到最佳制動效果,一般希望制動過程中滑移率穩定在 0.2附近[12]。 以此為控制目標,在Matlab/Simulink平臺上搭建ABS系統仿真模型,并分別基于H∞控制和PID進行動態仿真,得到單輪車輛模型在干瀝青路面上的ABS系統動態仿真響應過程。圖3為ABS系統的Simulink仿真模型。
圖4和圖5分別給出了采用H∞控制器和PID控制器時,車速、輪速和制動距離的變化曲線。可以看出,無論是PID控制還是H∞控制,ABS系統均能使車速和輪速不斷減小,最后同時減為0,表明當汽車制動停止時車輪才抱死,控制效果都比較好。而且,制動時間和制動距離也比較接近,說明兩種控制方式所獲得的汽車制動性能較為接近,都能使汽車獲得較好的制動性能和操縱穩定性。
圖6和圖7分別給出了在改變系統參數 (汽車載重量和制動器效能因數)時,基于PID控制器和H∞控制器的滑移率變化曲線。從控制系統的快速性角度來看,基于PID控制的滑移率曲線大約需要0.5 s的調節時間才能達到期望值,而基于H∞控制的滑移率曲線從0 s開始就達到了期望值,說明與PID控制相比,H∞控制響應更為迅速;從控制系統的魯棒性角度來看,當使汽車質量M從725 kg增加至1 000 kg或使制動器效能因數Kt從500增加至1 000時,滑移率曲線變化均比較小,基本上都能保持在期望滑移率0.2附近,說明兩種控制方法都能抵抗一定的參數不確定性,魯棒性能都比較好;從控制系統的穩定性角度來看,基于PID控制的滑移率曲線在制動過程末端出現了一定的波動,而基于H∞控制的滑移率曲線從始至終一直比較穩定,說明H∞控制比PID控制穩定性更好。
表1給出了兩種控制算法的性能對比分析,通過比較發現,相對于傳統的PID控制而言,H∞控制能明顯縮短ABS工作的調節時間,且具有更加優秀的穩定性,兩者都能使ABS系統具備抵抗系統不確定性的能力,即具有較好的魯棒性能,H∞控制唯一不足的是存在一定的穩態誤差。因此,總體而言H∞控制的控制效果優于PID控制。
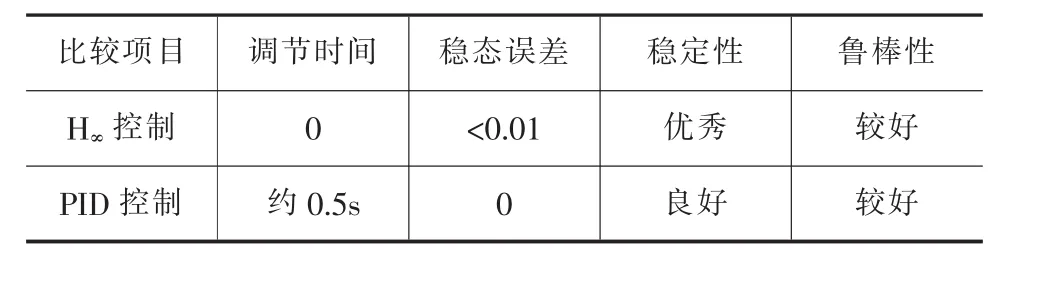
表1 兩種控制算法各項性能對比分析
4 結束語
相對于傳統PID控制的ABS系統而言,本文設計的基于H∞控制的ABS系統能使車輪滑移率有效的控制在期望值附近,且響應迅速、具有較好的魯棒性和穩定性,整體的控制效果優于PID控制,因此可以為實際的ABS控制系統開發提供理論借鑒。本文只是在單輪模型的基礎上研究,還不能很好的反映整車的情況;為了得到系統數學模型,本文進行了一些簡化 (如忽略液壓系統的滯后),這與實際的ABS系統也有一定差別,因此在本研究的基礎上可以建立更為準確的ABS系統模型(如兩輪模型或四輪模型),以得到更加合理的仿真結果。
[1]宋健,李永.汽車防抱死制動系統控制方法的研究進展[J].公路交通科技,2002,19(6):140-145.
[2]張顯庫.汽車防抱死制動系統的魯棒控制[J].重慶工學院學報(自然科學版),2008,22(7):1-5.
[3]程軍.汽車防抱死制動系統的理論與實踐[M].北京;北京理工大學出版社,1999.
[4]陳炯,王會義,宋健.基于滑移率和減速度的ABS模糊控制仿真研究[J].汽車工程,2006,28(2);148-151.
[5]Pacejka,H.B.and Bakker.E.The Magic Formula Tyre Model.In Pro.1st International Colloquium on Tyre Models for Vehicle Dynamics Analysis,Deft,Netherlands,1991.
[6]冷雪,李文娟,王旭東,等.汽車防抱死制動系統三種控制算法制動性能比較 [J].自動化技術與應用,2009,28(2):74-77,89.
[7]梅生偉,申鐵龍,劉康志.現代魯棒控制理論與應用(第二版)[M].北京:清華大學出版社,2008.
[8]吳旭東,解學書.H∞魯棒控制中加權陣選擇[J].清華大學學報(自然科學版),1997,37(1):27-30.
[9]趙慧,姜洪洲,韓俊偉,等.H∞混合靈敏度控制在液壓伺服系統中的應用 [J].中國機械工程,2002 (2),13(3):195-197.
[10]薛定宇.控制系統計算機輔助設計:MATLAB語言與應用[M].北京:清華大學出版社,2006.
[11]D.-W.Gu,P.Hr.Petkov and M.M.Konstantinov.Robust Control Design with MATLAB [M].Springer,1st Edition,2005.
[12]余志生.汽車理論 (第五版)[M].北京:機械工業出版社,2009.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
作文大王·低年級(2016年4期)2016-04-18 00:24:37