波輪洗衣機(jī)用永磁同步電機(jī)控制系統(tǒng)
2012-07-23 06:36:52黃騰云姜淑忠李小海
微特電機(jī) 2012年8期
關(guān)鍵詞:磁場
黃騰云,姜淑忠,李小海
(上海交通大學(xué),上海200030)
0引 言
現(xiàn)有的波輪洗衣機(jī)主要用單相電容運(yùn)轉(zhuǎn)異步電動(dòng)機(jī)和單相串勵(lì)換向器電動(dòng)機(jī)作為動(dòng)力,運(yùn)行效率低,洗滌、脫水轉(zhuǎn)速不可調(diào)或調(diào)速效率低,噪聲大,不能滿足高效率、低噪聲以及不同面料衣服的洗滌需求[1]。
永磁同步電動(dòng)機(jī)(以下簡稱PMSM)與單相異步電動(dòng)機(jī)相比具有功率密度大、效率高、噪聲低等優(yōu)點(diǎn),因此PMSM越來越多地用于波輪洗衣機(jī)。由文獻(xiàn)[2]可知,為了產(chǎn)生平滑的轉(zhuǎn)矩以及減小電磁噪聲,需要使相電流與反電動(dòng)勢同相位。對(duì)傳統(tǒng)的開環(huán)的調(diào)頻調(diào)壓 SPWM控制算法,由逆變器供給PMSM的相電壓為與反電動(dòng)勢同相位的正弦波。由于PMSM為感性負(fù)載,相電流會(huì)滯后于相電壓,無法保持定子電流綜合向量超前轉(zhuǎn)子磁極90°電角度,因而傳統(tǒng)的SPWM較難取得平滑電磁轉(zhuǎn)矩。而轉(zhuǎn)子磁場定向控制通過矢量變換將定子電流由靜止的三相坐標(biāo)系的iA、iB、iC變換為與轉(zhuǎn)子磁場同步旋轉(zhuǎn)的兩相坐標(biāo)系的勵(lì)磁分量id和轉(zhuǎn)矩分量iq,這樣就可以保證定子電流的轉(zhuǎn)矩分量超前轉(zhuǎn)子磁場90°,取得平滑的電磁轉(zhuǎn)矩。
本文針對(duì)波輪洗衣機(jī)的負(fù)載特性,設(shè)計(jì)了一種波輪洗衣機(jī)用PMSM矢量控制系統(tǒng)。該系統(tǒng)采用3個(gè)霍爾元件作為轉(zhuǎn)子位置傳感器,采用2個(gè)下橋臂采樣電阻檢測相電流,成本低、效率高、噪聲低。實(shí)驗(yàn)結(jié)果表明,該系統(tǒng)可以很好地滿足波輪洗衣機(jī)在洗滌和脫水狀態(tài)下的要求,具有很好的推廣價(jià)值。
1 PMSM的矢量控制
矢量控制是以產(chǎn)生同樣的旋轉(zhuǎn)磁動(dòng)勢為準(zhǔn)則,將三相坐標(biāo)系上的定子交流電流 iA、iB、iC通過Clarke變換等效成兩相靜止坐標(biāo)系上的交流電流iα和iβ,再通過Park變換等效成同步旋轉(zhuǎn)坐標(biāo)系上的直流電流id和iq[3]。轉(zhuǎn)子磁場定向的矢量控制是使同步旋轉(zhuǎn)坐標(biāo)系的d軸與轉(zhuǎn)子磁鏈ψr保持一致[4],其中磁鏈方程:

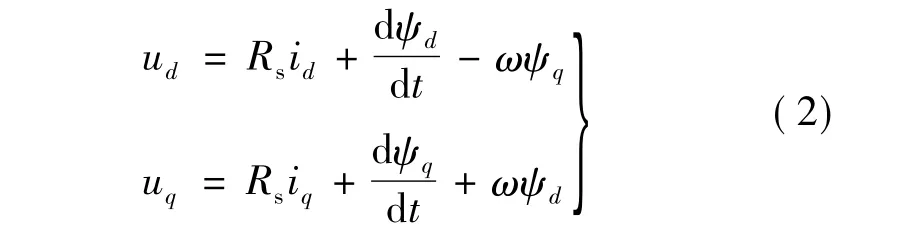
電壓方程:
電磁轉(zhuǎn)矩方程:

對(duì)成本有嚴(yán)格要求的波輪洗衣機(jī)采用的是外轉(zhuǎn)子結(jié)構(gòu)、磁鋼為表貼的永磁同步電動(dòng)機(jī)。因此式(3)可以簡化:

式中:ψd、ψq、ud、uq、id、iq、Ld、Lq分別為 d-q 軸磁鏈、電壓、電流和電感;ψf為永磁體轉(zhuǎn)子產(chǎn)生的磁鏈。
波輪洗衣機(jī)在洗滌狀態(tài),根據(jù)不同的洗衣程序可選擇的轉(zhuǎn)速范圍為200~800 r/min,經(jīng)過減速比為6.5的機(jī)械機(jī)構(gòu)帶動(dòng)波輪旋轉(zhuǎn)。在脫水狀態(tài)有300 r/min、500 r/min、700 r/min、900 r/min 四種轉(zhuǎn)速可選擇,直接帶動(dòng)外筒旋轉(zhuǎn)。根據(jù)波輪洗衣機(jī)的運(yùn)行特性,本文采用的矢量控制系統(tǒng)如圖1所示。
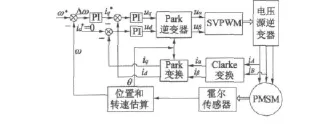
圖1 PMSM矢量控制框圖
波輪洗衣機(jī)在洗滌及脫水狀態(tài)下,PMSM的運(yùn)行轉(zhuǎn)速均小于額定轉(zhuǎn)速,可知PMSM工作在恒轉(zhuǎn)矩運(yùn)行區(qū),因此可以采用id=0的矢量控制方式。由式(4)可知,在該種控制方式下,可以獲得最高的轉(zhuǎn)矩/電流的比值,電動(dòng)機(jī)的銅耗也最小。并且通過磁場定向,達(dá)到了類似他勵(lì)式直流電動(dòng)機(jī)通過控制電樞電流直接控制轉(zhuǎn)矩的目的,這樣通過控制iq就可以直接控制電磁轉(zhuǎn)矩[5]。
2轉(zhuǎn)子位置估算
PMSM轉(zhuǎn)子磁場定向矢量控制需要有準(zhǔn)確的轉(zhuǎn)子磁極的位置,這樣才能將定子電流矢量變換到沿轉(zhuǎn)子磁場定向的d-q軸,這是磁場定向控制的關(guān)鍵所在[6]。為了實(shí)現(xiàn)準(zhǔn)確的磁場定向,因此需要高分辨率的轉(zhuǎn)子位置傳感器,例如光電編碼器、旋轉(zhuǎn)變壓器等。但是這類傳感器使得系統(tǒng)成本增加,并且易受高溫、高濕等惡劣環(huán)境的影響。為此很多文獻(xiàn)提出了無傳感器的轉(zhuǎn)子位置觀測方法,但這些算法在起動(dòng)和低速時(shí)容易出問題,不適合洗衣機(jī)的負(fù)載特性要求。霍爾傳感器具有價(jià)格便宜、運(yùn)行可靠的優(yōu)點(diǎn),近年來被廣泛應(yīng)用于PMSM控制系統(tǒng)[7]。洗衣機(jī)應(yīng)用場合對(duì)轉(zhuǎn)子位置分辨率要求不高,但對(duì)成本有苛刻要求,因此霍爾傳感器廣泛應(yīng)用于家用洗衣機(jī)中。
本系統(tǒng)采用3個(gè)鎖存型霍爾提供轉(zhuǎn)子位置信號(hào),三個(gè)霍爾元件的安裝位置兩兩互差120°電角度。當(dāng)霍爾元件在S極上時(shí),它的輸出為高電平,否則,輸出為低電平。PMSM連續(xù)旋轉(zhuǎn)時(shí),三個(gè)霍爾元件的輸出信號(hào)如圖2所示。由圖2可知,霍爾信號(hào)為三相相隔120°電角度的方波,且各有180°的有效角度,這些信號(hào)把360°電角度分為6個(gè)60°電角度的霍爾扇區(qū)。也就是說每一個(gè)電周期,三個(gè)霍爾元件的分辨率為6個(gè)脈沖,對(duì)矢量控制直接用這6個(gè)狀態(tài)來取得轉(zhuǎn)子的位置是不夠的,因此需要估算轉(zhuǎn)子的位置和轉(zhuǎn)速。
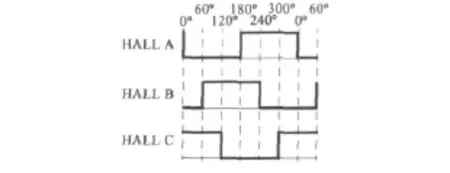
圖2 三相霍爾信號(hào)
假設(shè)兩個(gè)相鄰的霍爾狀態(tài)所間隔的時(shí)間為t,微處理器可通過定時(shí)器捕捉功能來記錄下這個(gè)值,因而可知電機(jī)的平均電角速度:

Capponi根據(jù)泰勒展開式提出了轉(zhuǎn)子位置和速度觀測的算法,有零階算法和一階算法[8],即:
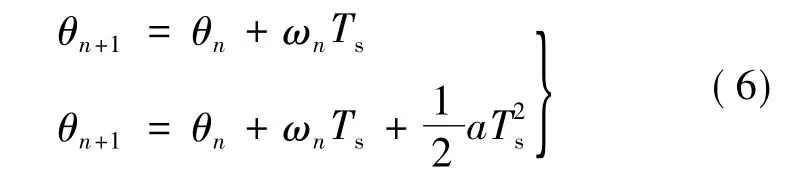
式中:θn為當(dāng)前計(jì)算得到的轉(zhuǎn)子位置角度,Ts為采樣時(shí)間即一個(gè)載波周期,a為平均加速度,即:
在通過上述算法得到PMSM的轉(zhuǎn)子角度后,單片機(jī)還需要判斷所得到的角度是否在預(yù)期的范圍之內(nèi)。例如,估算出來的轉(zhuǎn)子角度應(yīng)滿足30°≤θn+1≤90°,如果得到 θn+1< 30°或 θn+1> 90°,則將修正為θn+1=30°或θn+1=90°。并且單片機(jī)在每進(jìn)入一個(gè)新的霍爾扇區(qū)時(shí)進(jìn)行一次轉(zhuǎn)子位置校正,以消除誤差的累積。
上述算法隨著階數(shù)的增加,轉(zhuǎn)子位置的誤差必然會(huì)降低,但是會(huì)給單片機(jī)增加負(fù)擔(dān)。而在波輪洗衣機(jī)應(yīng)用場合,系統(tǒng)對(duì)轉(zhuǎn)子位置的精度要求不是很高,因此可以采用零階算法。
3電流檢測
矢量控制的相電流檢測通常是采用霍爾電流傳感器,但該傳感器成本較高。為了節(jié)約成本,人們提出了基于采樣電阻的電流檢測方法,此類方法有以下兩種[9]。
一種為單電阻采樣方法。該方法是通過采樣直流母線上采樣電阻上的電壓,然后根據(jù)SVPWM輸出的狀態(tài)重構(gòu)出三相定子電流。由于這種方法涉及的算法較復(fù)雜,所以本系統(tǒng)采用另外一種電流檢測方法。
另外一種為雙電阻采樣方法。該方法是通過采樣逆變電路的下橋臂任意兩個(gè)電阻,再根據(jù)定子電流三相的矢量和為零,來推算出第三相的電流值,如圖3所示。在下橋臂導(dǎo)通時(shí)檢測采樣電阻壓降,也就是在SVPWM控制策略中零矢量作用時(shí)進(jìn)行采樣,這樣就可以檢測出定子相電流。該方法必須保證有足夠長的時(shí)間來完成這兩路電流的采樣,以及需要在零矢量作用時(shí)間的中間時(shí)刻開始采樣,以得到準(zhǔn)確的相電流信息。
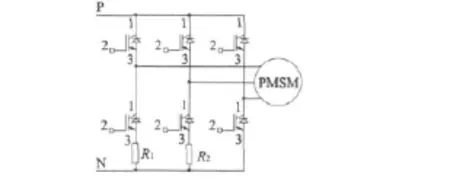
圖3 雙電阻電流采樣電路
4實(shí)驗(yàn)結(jié)果及結(jié)論
控制驅(qū)動(dòng)系統(tǒng)由整流電路、驅(qū)動(dòng)電路、逆變電路、控制電路和PMSM構(gòu)成,如圖4所示。用戶通過操作顯示面板設(shè)定洗衣程序,上位機(jī)R8C/24根據(jù)洗衣程序檢測水位、洗滌上蓋,控制排水閥、進(jìn)水閥,通過通信給下位機(jī)78K0R/Ix3發(fā)送運(yùn)轉(zhuǎn)及轉(zhuǎn)速命令。
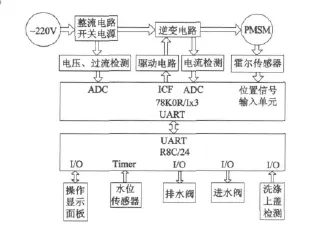
圖4 系統(tǒng)構(gòu)成框圖
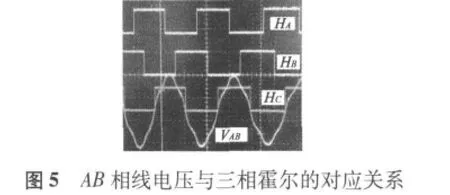
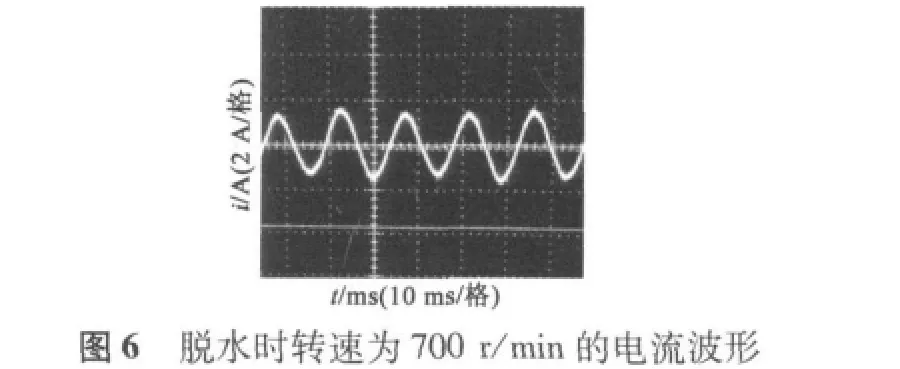
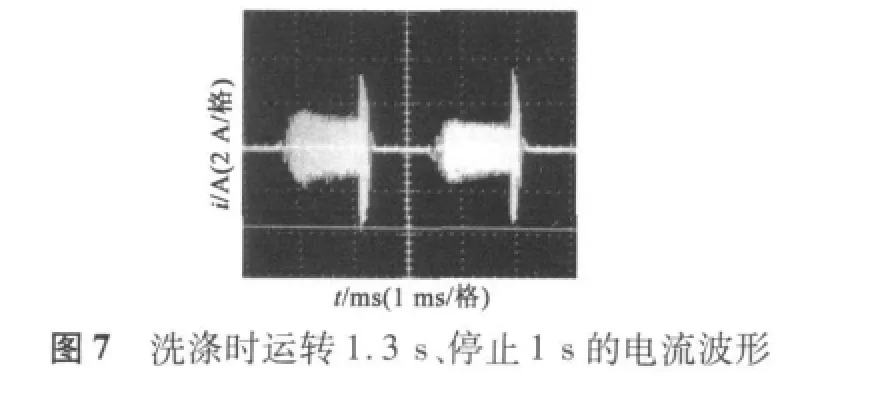
系統(tǒng)所用電機(jī)為一臺(tái)12極、功率180 W、采用外轉(zhuǎn)子結(jié)構(gòu)且磁鋼為表貼的PMSM。圖5為三相霍爾信號(hào)與AB相線電壓的對(duì)應(yīng)關(guān)系。圖6為在脫水狀態(tài)轉(zhuǎn)速為700 r/min時(shí),其中一相的電流波形。圖7為在洗滌狀態(tài)下運(yùn)行1.3 s、停止1 s其中一相的電流波形,從波形可以看出,該控制系統(tǒng)在洗滌和脫水兩種狀態(tài)都能達(dá)到較好的控制效果,滿足洗衣機(jī)控制驅(qū)動(dòng)系統(tǒng)高效率、低噪聲、低成本的要求。該方法可應(yīng)用到其他低成本的交流電機(jī)矢量控制的調(diào)速系統(tǒng)中。
[1] 李福和.洗衣機(jī)變頻控制系統(tǒng)的開發(fā)應(yīng)用[C]//中國家用電器技術(shù)大會(huì)論文集.2001:336-340.
[2] Todd D Batzel,Kwang Y Lee.Commutation torque ripple minimization for permanent magnet synchronous machines with Hall effect position feedback[J].IEEE Transactions on Energy Conversion,1998,13(3):257-262.
[3] 陳伯時(shí).電力拖動(dòng)自動(dòng)控制系統(tǒng)[M].北京:機(jī)械工業(yè)出版社,2003.
[4] 謝寶昌,任永德.電機(jī)的DSP控制技術(shù)及其應(yīng)用[M].北京:北京航空航天大學(xué)出版社,2005.
[5] 高靜,楊貴杰,蘇建勇.高性能低成本滾筒洗衣機(jī)用PMSM矢量控制系統(tǒng)[J].微特電機(jī),2010(10):34-38.
[6] 王成元,周美文,郭慶鼎.矢量控制交流伺服驅(qū)動(dòng)電動(dòng)機(jī)[M].北京:機(jī)械工業(yè)出版社,1995.
[7] Batzel T D,Lee K Y.Slotless permanent magnet synchronous motor operation without a high resolution rotor angle sensor[J].IEEE Trans on Energy Conversion,2000,15(4):366-371.
[8] Giulii Capponi F,De Donato G,Del Ferraro L.Brushless AC Drive Using An Axial Flux Synchronous Motor With Low Resolution Position Sensors[C]//Proc.of IEEE 35th Annual Power Electronics Specialists Conference.2004:2287-2292.
[9] Parasiliti F,Petrella R,Tursini M.Low Cost Phase Current Sensing in DSP Based AC Drives[C]//ISIE.1999:1284-1289.
猜你喜歡
當(dāng)代陜西(2022年6期)2022-04-19 12:11:54
數(shù)學(xué)物理學(xué)報(bào)(2022年1期)2022-03-16 06:14:50
娃娃樂園·綜合智能(2021年12期)2022-01-18 05:46:42
華人時(shí)刊(2020年13期)2020-09-25 08:21:42
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2020年1期)2020-02-20 13:22:30
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2017年3期)2017-05-04 07:15:09
中學(xué)生數(shù)理化·高二版(2016年12期)2017-02-28 10:08:42
電子制作(2016年1期)2016-11-07 08:42:44
Coco薇(2016年1期)2016-01-11 16:53:24
西華師范大學(xué)學(xué)報(bào)(自然科學(xué)版)(2015年3期)2015-02-27 15:31:23
