一種基于3-UPS并聯機構的六維控制器運動學分析
2012-07-23 00:35:26宮金良張彥斐
山東理工大學學報(自然科學版) 2012年1期
肖 霄,宮金良,張彥斐
(山東理工大學機械工程學院,山東淄博255091)
在用戶與計算機的交互過程中,鼠標是典型的二維控制器,通過它可以實現對計算機系統的各種操作,但是對于三維空間來說,它們并不太合適,因為三維空間中物體具有6個自由度,目前很難找出比較直觀的辦法把鼠標的平面運動映射成三維空間運動[1-3].然而隨著科學技術的迅猛發展,對能夠實現多自由度移動或轉動控制的多維控制器需求越來越廣泛,如虛擬現實技術、遙操作技術、計算機輔助設計、計算機三維動畫設計以及數據可視化等,這些領域都需要一個多維控制設備來有效實現三維空間中物體的多自由度控制[4-5].基于文獻[6] 提出的六維控制器設計方案,本文著重對其機械本體3-UPS并聯機構進行運動學分析,從而為該六維控制器結構參數優化設計以及控制電路設計提供必要的理論依據.圖1所示為3-UPS并聯機構三維模型,它由動平臺、靜平臺以及3個相同的UPS支鏈構成,其中虎克鉸U由繞垂直于靜平臺平面的軸線和平行于靜平臺平面的軸線轉動的兩個轉動副構成,且兩軸線交于一點.圖2給出了3-UPS并聯機構的結構簡圖.
3-UPS并聯機構的運動學分析包括兩個方面:一方面是在已知機構幾何參數和關節變量的情況下求解動平臺相對于參考坐標系的位置和姿態,稱為3-UPS并聯機構的運動學正解;另一方面是在已知機構幾何參數以及動平臺相對于參考坐標系位置和姿態的情況下求解達到該位置和姿態時所需的關節變量,稱為3-UPS并聯機構的運動學反解[7].動平臺的位置求解較為簡單,而姿態求解較為復雜.通常用旋轉矩陣、RPY角和歐拉角等來描述機器人末端姿態,由于采用旋轉矩陣描述動平臺姿態時需要9個參數,而采用RPY角和歐拉角描述只需要3個參數,同時歐拉角的所有轉動都是相對于動坐標系描述的[8],這在計算機編程實現六維控制器虛擬控制時極為方便,因此本文將采用歐拉角來描述動平臺相對于參考坐標系的姿態.
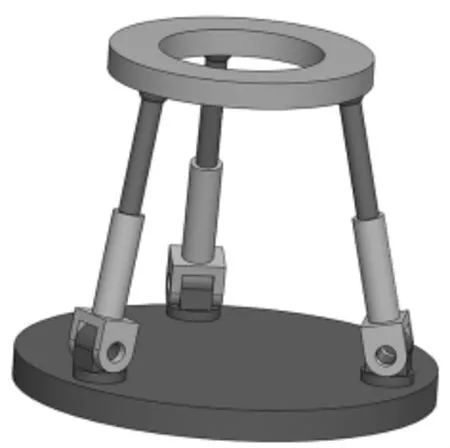
圖1 3-UPS并聯機構三維模型

圖2 3-UPS并聯機構結構簡圖
1 3-UPS并聯機構運動學正解
如圖2機構簡圖所示,其中Ai(i=1,2,3)為構成虎克鉸U兩轉動副中心軸線的交點,Bi(i=1,2,3)為球鉸S的中心點,且A1、A2、A3及B1、B2、B3所圍成的三角形均為等邊三角形,設兩等邊三角形中心點分別為O1和O2,Bi0(i=1,2,3)為Bi在A1、A2、A3所確定平面上投影,li(i=1,2,3)為Ai、Bi兩點間距離,αi(i=1,2,3)為AiBi在A1、A2、A3所確定平面上投影與AiO1所夾銳角,βi(i=1,2,3)為AiBi與A1、A2、A3所確定平面的夾角.為了便于分析計算,分別建立了如圖2所示靜坐標系O1X1Y1Z1及動坐標系O2X2Y2Z2,其中確立O1、O2分別為靜、動坐標系原點,沿A1A2、B1B2方向為X軸方向,沿O1A3、O2B3方向為Y軸方向,過平臺中心點且垂直于平臺平面方向為Z軸方向.設Bi(i=1,2,3)在靜坐標系中坐標為(xi,yi,zi),O2點坐標為(x,y,z).
設等邊三角形A1A2A3邊長為a,則A1、A2、A3在坐標系O1X1Y1Z1中坐標分別為:(-a/2,/6,0),(a/2,-/6,0),(0/3,0).又AiBi(i=1,2,3)在A1、A2、A3所確定平面上投影為AiBi0,且有‖AiBi0‖=licosβi,則由O1Bi0=(O1Ai+AiBi0)(i=1,2,3)可知B10、B20、B30在坐標系OX1Y1Z1中坐標分別為

因為‖BiBi0‖=lisinβi(i=1,2,3),即zi=lisinβi,則O2點坐標為

由機器人運動學知識可知,當用Z-Y-X歐拉角描述動坐標系時有

進一步,由式(3)可以逆解得到α、β、γ為

其中:

式(2)和式(4)即為3-UPS并聯機構運動學正解.顯然,當已知機構結構參數和關節變量時便可確定動平臺的位置和姿態,當給定各關節變量變化范圍時,便可求得動平臺相對于參考坐標系的運動范圍,也即六維控制器的工作空間,它是六維控制器操作性能評價指標之一.
2 3-UPS并聯機構運動學反解
在求解3-UPS并聯機構運動學反解時,動平臺中心點坐標(x,y,z)以及α、β、γ為已知變量,而機構關節變量αi、βi、li為待求未知量.由坐標變換公式可知靜坐標系O1X1Y1Z1中點與動坐標系O2X2Y2Z2中及存在以下關系:

設等邊三角形B1B2B3邊長為b,則B1、B2、B3在動坐標系O2X2Y2Z2中坐標分別為:(-b/2,-,(b/2,-,(0
將坐標代入(5)式可得B1、B2、B3在靜坐標系O1X1Y1Z1中坐標(xi,yi,zi)(i=1,2,3).
因為li=‖AiBi‖(i=1,2,3),則

進一步,由zi=lisinβi可得

又由AiBi0(i=1,2,3)與X1軸夾角與其在X1軸上投影關系可以求解得到:

(6)、(7)、(8)三式即為3-UPS并聯機構運動學反解,當已知動平臺相對于參考坐標系的位姿時,便可確定各個運動關節的變量大小.由于六維控制器各關節變量通過安裝在虎克鉸U兩轉動副和移動副P處的傳感器獲得,因此3-UPS并聯機構運動學反解對傳感器量程及分辨率的選擇具有很大的指導意義.
3 MATLAB仿真實例

圖3 沿X軸移動15mm

圖4 沿Y軸移動15mm
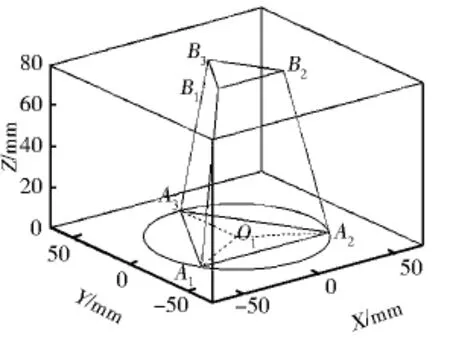
圖5 沿Z軸移動15mm
表1給出了3種不同機構位形時,根據運動學反解計算的對應關節變量.將關節變量重新代入正解計算公式,得到表2的位形參數.結果表明:與已知位形參數相比,誤差均小于10-5,驗證了機構正反解的正確性.
表1 a=時機構反解

表1 a=時機構反解
[x,y,z;α,β,γ] [α1,α2,α3,β1,β2,β3,l1,l2,l3] [0,0,70;0,0,0] [0.000,0.000,0.000,71.075,71.075,71.075,74.000,74.000,74.000] [15,0,70;0,0,0] [11.462,-34.264,32.005,61.667,79.225,67.986,79.527,71.256,75.505] [0,15,70;0,0,0] [-22.411,-22.411,0.000,64.045,64.045,82.674,77.852,77.852,70.576]
表2 a=時機構正解及誤差

表2 a=時機構正解及誤差
[__________________________________x,y,z;α,β,γ] δ_______[0.000,-1.184×10-15,70.000;0.000,0.000,0.000] ≤10-15[15.000,-2.768×10-5,70.000;-1.936×10-5,7.298×10-6,-7.093×10-6] ≤10-15[____________________0.000,15.000,70.000;0.000,-4.505×10-6] ≤10-6
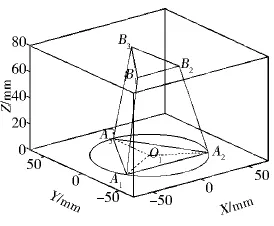
圖6 繞X軸轉動15°
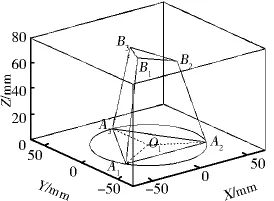
圖7 繞Y軸轉動15°

圖8 繞Z軸轉動15°
4 結束語
本文對六維控制器主體機構3-UPS并聯機構進行了運動學分析,求出了其運動學正反解.通過運動學正解一方面可以求解機構工作空間,進而確定六維控制器可操作范圍及操作靈活性,另一方面可以用于上位機虛擬環境中物體的控制,因此運動學正解的正確性尤為重要.為了驗證正解的可靠性,本文采用MATLAB軟件對機構進行了運動學仿真,仿真結果顯示所求正反解是完全正確的.3-UPS并聯機構的運動學分析為六維控制器結構參數優化設計以及控制電路的設計提供了理論依據.
[1] 梁秀波,張順,李啟雷,等.運動傳感驅動的3D直觀手勢交互[J] .計算機輔助設計與圖形學學報,2010,22(3):521-526.
[2] Huang C R,Chen C S,Chung P C.Tangible photorealistic virtual museum[J] .IEEE Computer Graphics and Applications,2005,25(1):15-17.
[3] 劉春,徐菁.一種數據手套交互控制模塊的設計與應用[J] .計算機仿真,2009,26(3):251-255.
[4] 宮金良,張彥斐,周玉林,等.一種新型六維鼠標在虛擬現實技術中的應用[J] .傳感器技術,2005,24(9):82-84.
[5] 趙現朝,高峰.并聯機構的六維鼠標研制開發[J] .機械設計,2003,20(6):15-17.
[6] 宮金良,張彥斐,魏修亭.六維位置姿態傳感器:中國,ZL200710114742.7[P] .2009-8-19.
[7] Hunt K H.Kinematic geometry of mechanisms[M] .New York:Oxford University Press,1978.
[8] 劉辛軍,吳超,汪勁松,等.[PP] S類并聯機器人機構姿態描述方法[J] .機械工程學報,2008,44(10):19-23.