面向操作的裝備虛擬訓練系統機理建模方法
2012-07-25 11:05:10賈晨星朱元昌邸彥強
計算機工程與設計 2012年3期
賈晨星,朱元昌,邸彥強
(軍械工程學院 光學與電子工程系,河北 石家莊050003)
0 引 言
新型軍械裝備面臨著訓練成本高,受空間、氣候、人員保障等因素制約等問題,基于實裝的傳統方法難以滿足教學訓練的要求[1]。在應用需求和支撐技術的推動下,能實現裝備 “全任務”[2]訓練的裝備虛擬訓練系統 (EVTS)[3]成為新一代教學訓練模式。
裝備虛擬訓練系統為使用戶感覺到 “真實感”,需要解決兩個 “像不像”的問題:①虛擬裝備與實裝的外觀 “像不像”;②能否像操作實裝那樣操作虛擬裝備,即工作原理“像不像”。機理模型[4]是對裝備工作特性和行為的相似描述,是解決第二個問題的關鍵。基于視景仿真、虛擬現實和人機交互等技術的虛擬訓練系統[5-7]雖然可以使用戶體會到身臨其境的沉浸感,但若脫離了機理模型,再真實的虛擬裝備都是孤寂的,沒有生命的。可見,機理模型是裝備虛擬訓練系統的重要組成,不可或缺。
現有裝備虛擬訓練系統中存在機理模型與外觀模型邊界不明確,緊密耦合的問題。另外,國內對裝備操作虛擬訓練的機理建模方法的研究[8-9],大多針對具體仿真任務,只停留在應用技術層面,缺乏深入的理論研究。本文對裝備仿真模型結構進行了分析,介紹了一種面向操作的裝備機理建模方法及其實現工具。
1 裝備仿真模型結構
仿真依據的是相似性原理[10]。根據相似性原理,裝備仿真模型的表現可分為幾何相似和數學相似。幾何相似指形狀、比例的相似,如飛機模型;數學相似根據數學表達式內涵可進一步劃分為特征相似和邏輯相似。前者是對象特征數據方程或參數含義的相似,后者是對獲取的信息進行分析、歸納、綜合、判定、決策直至操作控制方式的相似。因此從特征上,我們可以將裝備仿真模型分為外觀模型和機理模型,如圖1所示。外觀模型是裝備視覺特征的直接映射,機理模型是對裝備動力、機械、電氣等方面工作原理的近似描述[11]。

圖1 緊耦合式仿真模型結構
如圖1所示,虛擬訓練系統將訓練人員的動作采集、信息解釋、數據處理,以及虛擬裝備的響應、顯示等,這樣一個流程集中在一個模型里完成,造成機理模型與外觀模型的緊密耦合,給兩類模型的維護、擴展和重用帶來極大的不便。松耦合式仿真模型結構如圖2所示,外觀模型中只包含虛擬裝備的基本動作行為,機理模型則控制裝備內各部件間的工作邏輯和部件響應。兩類模型通過消息機制[12-13]相互作用。外觀模型將采集到的操作轉化為消息,傳遞給機理模型。機理模型在數據處理后返回仿真數據,驅動外觀模型。
這種外觀模型與機理模型獨立開發的模式,降低了模型開發的難度。開發人員可以根據裝備仿真任務的不同,在外觀模型一定的情況下可實現多種機理控制,對外觀模型和機理模型實現了重用。
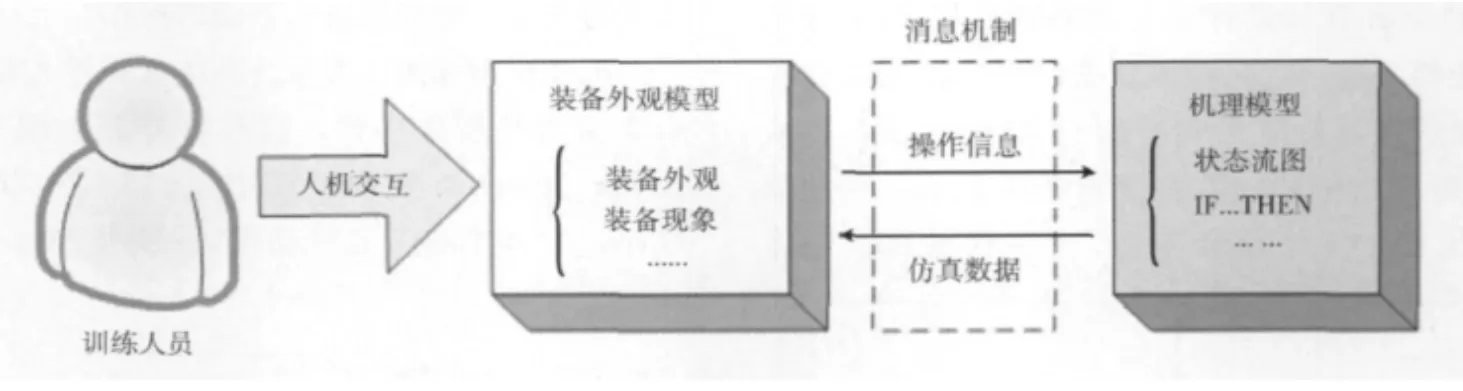
圖2 松耦合式仿真模型結構
2 面向操作的裝備機理建模
2.1 面向操作的裝備虛擬訓練概述
面向操作的裝備虛擬訓練,也叫裝備操作虛擬訓練,是指以培訓裝備使用者掌握裝備操作流程為仿真任務的虛擬操作仿真。虛擬操作仿真是實際操作過程在虛擬環境下的再現或預演,將真實反映與描述裝備、操作人員和維修、檢測工具之間所發生的各種行為和經歷的各種狀態。裝備操作過程實際上是 “人-虛擬裝備-工具/設備”三者之間發生交互作用的過程,其中人是主體,虛擬裝備和工具是客體。作為主體,人將支配和驅動虛擬裝備部件與檢測、維修工具的運動。虛擬裝備和工具作為客體,對人的行為具有一定的約束,亦即人的行為必須服從于裝備結構、裝配特點以及工具使用特點所產生的客觀約束條件。
不論是裝備的戰斗操作還是檢測維修操作,都具有過程邏輯性。所謂過程邏輯性,是指裝備的使用操作嚴格遵守先后順序,錯誤操作將導致裝備損壞。為延長裝備的使用壽命,發揮最佳的作戰效能,操作過程是固定的。這種固定的操作過程就是對主體的客觀約束條件,也是虛擬操作訓練的研究重點。面向操作的機理建模的目的就是根據相似性原理,建立裝備操作過程的抽象表述。
2.2 面向操作的機理建模方法
在裝備固定的操作過程中,每進行一步操作,裝備的工作狀態都會發生變化。因此,對應操作步驟集合,可將裝備的工作過程劃分為可數的工作狀態,把操作事件作為引起工作狀態改變的原因。
隨著不同操作事件的發生,裝備工作狀態間斷的發生變化,呈現出離散事件動態特性;另一方面,裝備內部的一些狀態變量,表現為隨著時間變化而連續變化,體現出連續時間動態系統特征。由此可見,裝備的工作狀態表現為離散控制與系統連續運行的相互作用,即具有混雜性。
狀態圖 (Statecharts)[14-15]是 David Harel于 1987年 提出的一種可視化建模語言,針對傳統有限狀態機的不足,增加了層次、并發、廣播通訊等概念,適用于大型復雜裝備系統的動態操作過程建模。本文基于狀態圖理論,采用將系統連續變量的描述嵌入到描述離散事件的符號系統中的思想,提出了一種針對混雜系統的可視化建模方法,本質在于描述裝備操作過程中不同工作狀態下可進行的操作。
機理模型中包含4個建模元素 〈S,L,T,J〉:S是最基本的建模單元——工作狀態;L是工作狀態遷移標簽;T是工作狀態遷移;J是工作狀態節點,包括分支節點和歷史節點。
工作狀態S包括 〈q,x,f,Inv,as,λ,φ〉7個元素。q和x分別代表工作狀態中的離散變量和連續變量;f是工作狀態中連續變量的演化規則;Inv是工作狀態中連續變量的不變集。當系統處于某個工作狀態Si,若其連續變量xi保持在相應的不變集Inv(Si)內部,即xi∈Inv(Si)時,連續變量xi按照相應演化規則fi進行演化。如果連續變量超出不變集Inv(Si),則將發生工作狀態遷移;as是工作狀態內部的動作,包括進入動作Entry、保持動作During、退出動作Exit;λ是層次函數,定義狀態及其子狀態的關系;φ是工作狀態的類型,分別為 {BASIC,OR,AND}。若某工作狀態Si中有子狀態,即λ(Si)≠Φ,且狀態類型φ(Si)=OR,則當系統進入狀態Si時,它僅能處于Si的某一個子狀態。若λ(Si)≠Φ且φ(Si)=AND,則當系統進入狀態Si時,它同時處于Si的每一個子狀態。若λ(Si)=Φ,則φ(Si)=BASIC。
狀態遷移標簽L用于標明引起工作狀態遷移的操作事件e、使能條件c和遷移動作at。狀態遷移T用于標示工作狀態間的遷移方向,它包括源狀態、目標狀態和標簽三元素 (注:源狀態和標簽可為空缺)。如圖3所示,從“工作狀態A”到 “工作狀態B”的狀態遷移TA-B,它的源狀態是 “工作狀態A”,目標狀態是 “工作狀態B”。遷移標簽為E[C]/A,表示當系統處于 “工作狀態A”時發生事件E,若滿足使能條件C,則狀態遷移,同時有遷移動作A。

圖3 狀態遷移
考慮到裝備系統機理模型復雜,在此僅以某型高炮武器系統的幾個操作步驟為例,對上述建模方法進行講解。
訓練科目的操作流程:①車長打開總電源,總電源指示燈亮;②駕駛員腳踩油門或者手拉油門操縱桿,使發動機轉速達到1800r/min以上;③車長打開電站開關;④炮手打開火控開關,同時車長打開炮塔開關。兩個操作為異步并行關系,完成后進入下面的操作。
機理模型如圖4所示。系統首先進入初始化狀態 (initial)并等待操作事件。當有打開總電源開關事件 (open power switch)發生,工作狀態遷移至駕駛員狀態(driver),并伴隨有遷移動作——總電源燈亮 (light1on)。

圖4 機理模型
工作狀態Driver的類型為OR,包含3個互斥子狀態。進入工作狀態Driver后,首先處于默認初始子狀態PowerOn。當腳踩油門操作事件 (step accelerator pedal)發生,且滿足 “總電源開 (power on)”使能條件時,狀態遷移至子狀態SubState1。當處于子狀態SubState1時,有保持動作 (During)油門加速指示燈亮 (light2on)。手拉油門操作桿事件 (pull accelerator pole)的響應原理與其類似,不再贅述。應當注意的是,兩個操作事件是互斥事件,即當其中一個事件發生后,狀態遷移至對應的目的狀態,另一個事件在之后將不能產生狀態遷移。
不論系統處于狀態Driver的任何一個子狀態,如果發生關閉總電源事件 (close power switch),系統將退出狀態Driver并遷移至初始化狀態 (Initial)。當系統因為打開電源開關事件 (OpenPowerSwitch)再次進入工作狀態Driver時,通過狀態中的歷史節點H,系統直接進入之前退出狀態Driver時的活動子狀態。
發動機轉速Speed是狀態Driver的連續變量,有不變集Inv(State2)=[0,1800)。當發動機轉速高于1800r/min時,系統狀態遷移至State1。當發生打開電站開關事件 (open PowerStation switch)后,系統遷移至工作狀態Parallel Operation。
工作狀態Parallel Operation的類型為AND,包含兩個并行的子狀態ArtillerMan和Conductor。系統狀態遷移至狀態Parallel Operation后,兩個子狀態中的默認初始狀態Wait_1和Wait_2被激活,等待各自的遷移事件的發生。打開火控開關事件 (open fire control switch)和打開炮塔開關事件 (open artillery turret switch)互為并行事件,發生先后互不影響。當兩個事件均已發生,則滿足下一遷移的使能條件 [Fire Ready &Turret Ready],系統狀態從Parallel Operation遷移至后續的工作狀態。
2.3 實現方法
面向操作的裝備機理模型雖然可以詳盡的表述裝備的工作原理,但是為了進一步對裝備系統仿真,需要將此圖形化模型轉換為能夠被計算機所識別的形式。
Matlab/Stateflow作為Statecharts的一個建模工具,已經得到了學術界廣泛的認可。Stateflow中的狀態 (State)對應工作狀態S,每個狀態中同樣包含3種動作 (entry,during,exit)。轉移 (Transition)和默認轉移 (Default Transition)對應狀態遷移T,歷史節點 (history junction)和連接節點 (connective junction)對應工作狀態節點J。Stateflow中的轉移標簽 (transition label)由4部分組成,分別為事件 (event)、條件 (condition)、條件動作 (condition action)和轉移動作 (transition action)[16]。
用Stateflow對圖4模型進行轉化,建立如圖5所示的仿真模型。這個仿真模型既可以在Matlab/Simulink中進行可視化仿真,也可以通過Stateflow Coder將其轉化為計算機程序代碼,如C、C++等。
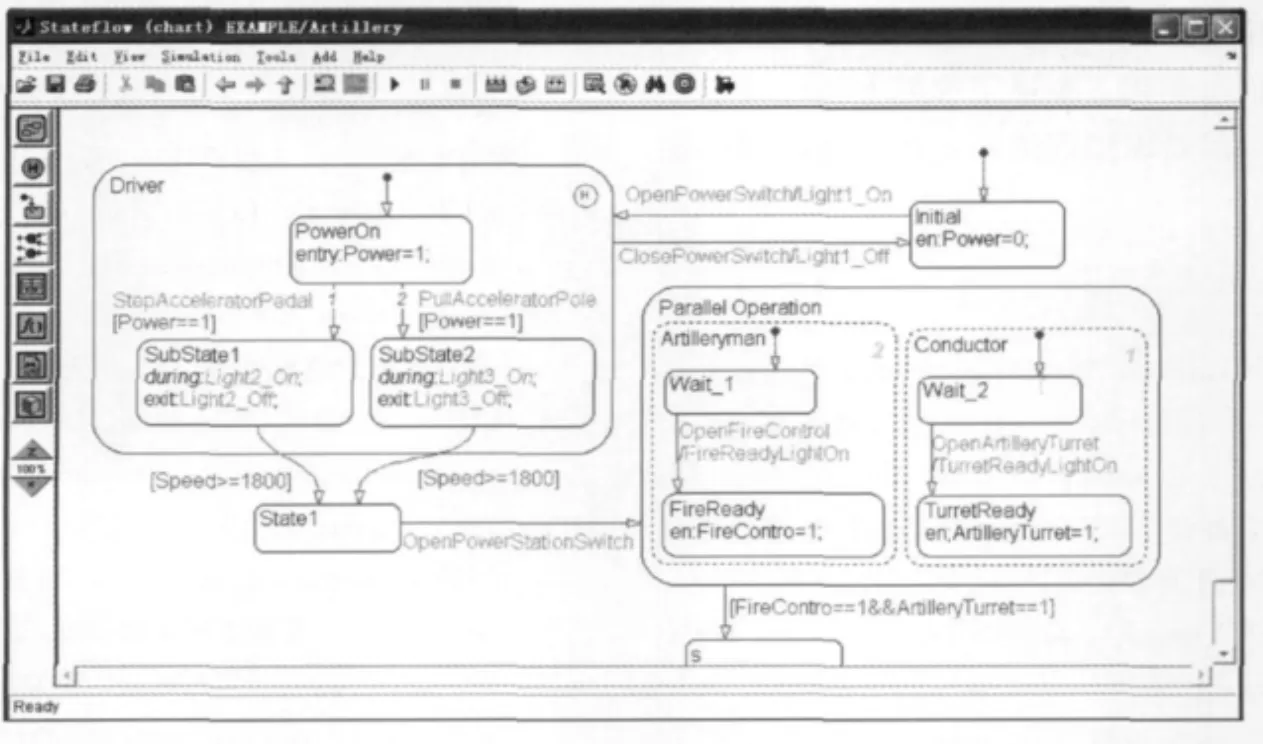
圖5 Stateflow仿真模型
3 應用驗證
“某型高炮虛擬操作訓練系統”采用上述面向操作機理建模方法,并結合目前先進的虛擬現實技術和分布交互式仿真技術構建了一個具有沉浸感的,支持多人協同訓練的桌面式虛擬訓練系統。受訓者通過鼠標、鍵盤和操縱桿等人機交互設備,在虛擬訓練系統中進行戰斗操作和故障檢測維修等訓練科目,掌握基本理論,熟練操作程序,累積操作經驗,大大縮短了訓練時間、提高了訓練質量和效益。
系統的開發基于當前主流虛擬現實軟件Virtools和三維建模軟件3DMAX,并采取了機理模型與外觀模型獨立開發的設計思想。外觀模型中只包含虛擬部件的基本動作行為,如指示燈的亮滅,車門的開關動作等。機理模型負責控制虛擬裝備的操作過程和裝備外觀模型的響應。如圖6所示,整個系統用一個完備的機理模型,部署在獨立的節點上,由同一個機理模型完成對外觀模型的控制。機理模型與外觀模型的之間的消息交互通過中間件HLA/RTI完成。虛擬訓練系統運行畫面如圖7所示。

圖6 機理模型與外觀模型分布交互
4 結束語
本文提出的機理模型與外觀模型獨立開發的設計思想,解決了既有裝備虛擬訓練系統中機理模型與外觀模型緊密耦合的現象,降低了系統開發的難度,實現了模型的重用。面向操作的裝備機理建模方法基于圖形化、層次化的建模形式,具備標準的語義、語法,可以完備的描述大型混雜系統的動態操作過程,實現了 “一張圖頂百句話”的效果。基于該機理建模方法開發的 “某型高炮虛擬訓練系統”,已推廣至軍事院校教學訓練使用,驗證了建模方法的可行性和實用性。希望本文可以對虛擬訓練系統的發展起到一定的促進作用。

圖7 某高炮虛擬訓練系統仿真畫面
[1]TAN Jishuai,HAO Jianping,WANG Songshan.A summary of equipment virtual training system’s research and development[J].Ordnance Industry Automation,2007,26 (5):6-7 (in Chinese).[譚繼帥,郝建平,王松山.裝備虛擬維修訓練研究與發展綜述 [J].兵工自動化,2007,26 (5):6-7.]
[2]ZHU Yuanchang,DI Yanqiang,QUAN Houde,et al.Simulation training system of general radar equipment and key technology [J].Journal of System Simulation,2005,17 (11):2633-2637(in Chinese).[朱元昌,邸彥強,全厚德,等.通用雷達裝備模擬訓練系統及其關鍵技術研究 [J].系統仿真學報,2005,17 (11):2633-2637.]
[3]ZHAO Jingcheng.Design and practice of virtual simulation training system [M].Beijing:National Defense Industry Press,2008:19-20(in Chinese).[趙經成.虛擬仿真訓練系統設計與實踐 [M].北京:國防工業出版社,2008:19-20.]
[4]WANG Xingren,WEN Chuanyuan,LI Bohu,et al.Development of china’s system model and simulation technology [J].Journal of System Simulation,2009,21 (21):6683-6688 (in Chinese).[王行仁,文傳源,李伯虎,等.我國系統建模與仿真技術的發展 [J].系統仿真學報,2009,21 (21):6683-6688.]
[5]LI Dan,YANG Sixin,YANG Yuhang.Helicopter maintenance training simulation system [J].Computer Engineering and Design,2009,30 (5):1212-1215 (in Chinese). [李丹,楊四新,楊宇航.直升機維修訓練仿真系統 [J].計算機工程與設計,2009,30 (5):1212-1215.]
[6]WANG Shuxin,YU Shilin,NING Haiqiang,et al.Development of the simulated training system for main power equipment used in warships [J].Ship & Ocean Engineering,2008,37(4):28-30 (in Chinese).[王術新,余世林,寧海強,等.船艇主動力裝備模擬訓練系統的開發與研制 [J].船海工程,2008,37 (4):28-30.]
[7]HE Jiawu,LAI Yukun.Development of weapon equipment virtual maintenance training system [J].Science of Technology,2010,28 (24):71-74 (in Chinese). [何嘉武,賴煜坤.武器裝備虛擬維修系統設計與實現 [J].科技導報,2010,28(24):71-74.]
[8]LIU Yaozhou,LIU Yanhong,ZHAO Hongwu.Application of operation response model in virtual operation training system [J].Computer Engineering,2006,32 (3):267-269 (in Chinese). [劉耀周,劉延宏,趙宏武.操作響應模型在虛擬操作訓練系統中的應用 [J].計算機工程,2006,32 (3):267-269.]
[9]ZHU Luofeng,SUN Youzhao.Research and realization on operating response model of virtual maintenance training system[J].Aircraft Design,2009,29 (1):75-80 (in Chinese).[朱羅鋒,孫有朝.虛擬維修訓練系統VMTS操作響應模型研究與實現 [J].飛機設計,2009,29 (1):75-80.]
[10]GUO Qisheng,DONG Zhiming,LI Liang,et al.System modeling and simulation [M].Beijing:National Defense Industry Press,2007(in Chinese).[郭齊勝,董志明,李亮,等.系統建模與仿真 [M].北京:國防工業出版社,2007.]
[11]LIU Ying,ZHU Yuanchang,DI Yanqiang.Complex equipment modeling method for virtual training system [J].Journal of Ordnance Engineering College,2008,20 (3):4-7 (in Chinese).[劉穎,朱元昌,邸彥強,等.虛擬訓練系統復雜裝備建模方法研究 [J].軍械工程學院學報,2008,20 (3):4-7.]
[12]PENG Hong,ZHAO Xibin,YONG Jianping,et al.Heterogeneous system integration solution based on message mechanism [J].Application Research of Computers,2005,22(8):43-46 (in Chinese).[彭竑,趙曦濱,雍建平,等.基于消息機制的異構系統集成方案 [J].計算機應用研究,2005,22 (8):43-46.]
[13]FAN Mingliang,ZHANG Lina.Design and application of the workflow simulation modeling based on message driving mechanism [J].Computer Development & Applications,2011,24 (1):60-62 (in Chinese). [范明亮,張麗娜.基于消息驅動機制的工作流仿真模型的設計與應用 [J].電腦開發與應用,2011,24 (1):60-62.]
[14]Eshuis,Rik.Reconciling statecharts semantics [J].Science of Computer Programming,2009,74 (3):65-99.
[15]Sekerinski,Emil.Verifying statecharts with state Invariants [C].United State:Proceeding of the IEEE International Conference on Engineering of Complex Computer Systems,2008:7-14.
[16]ZHANG Wei.Stateflow:Logical system modeling [M].Xi’an:Publisher of Xi’an University of Electronic and Technology,2007:24-25 (in Chinese). [張威.Stateflow邏輯系統建模[M].西安:西安電子科技大學出版社,2007:24-25.]
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19