分布式控制系統精確時鐘同步技術
2012-07-26 04:57:08楊傳順李國華
自動化儀表 2012年4期
楊傳順 袁 建 李國華
(江蘇自動化研究所,江蘇 連云港 222006)
0 引言
隨著分布式控制系統應用范圍的廣泛增長和應用規模的不斷擴大,通過系統網絡特別是控制系統中廣泛應用的以太網傳遞和同步系統內各分散節點的時鐘變得越來越重要。
系統對時鐘的應用主要有兩種:基于絕對時間的應用和基于頻率的應用。絕對時間用于記錄系統內事項發生的次序;頻率用于控制器、執行器以及傳感器的同步采樣、反饋和執行。
基于此,工業界一直在致力于解決以太網定時同步能力不足的問題。1992年推出的基于軟件控制方式的網絡時間協議(network time protocol,NTP),同步精度可以達到200 μs,但是不能滿足測量儀器和工業控制所需的精度。為了提高分布網絡中定時同步的精度,美國工業界成立了網絡精確時鐘同步委員會,于2002年底推出了IEEE 1588標準[1]。該標準的精確時鐘同步協議在時鐘同步方面取得了重大進展,2008年推出了該標準的2.0版,國際電工協會也把此標準納入到了IEC標準中,對應的標準是IEC 61588[2]。
1 IEEE 1588標準
IEEE 1588標準的全稱是網絡測量和控制系統的精確時鐘同步協議(precision time protocol,PTP)。PTP和NTP技術一樣,具有配置容易、收斂快速以及對網絡帶寬和資源消耗少等優點。它的主要原理是通過一個同步信號周期性地對網絡中所有節點的時鐘進行校正,可以使基于以太網的分布式系統時鐘達到高精度同步。
在IEEE 1588標準中,系統內的時鐘分為普通時鐘和邊界時鐘兩種。只有1個PTP通信端口的時鐘是普通時鐘;有2個及以上PTP通信端口的時鐘是邊界時鐘。每個PTP端口的狀態有9種,主要的3種狀態是:主狀態(PTP_MASTER)、從狀態(PTP_SLAVE)和被動狀態(PTP_PASSIVE)。PTP端口處于主狀態的時鐘稱為主時鐘(grandmaster clock,GMC),處于從狀態的時鐘稱為從時鐘,主時鐘負責同步系統內所有的從時鐘。如果PTP端口處于被動狀態,則意味著對應的時鐘不參與時鐘同步。
理論上任何時鐘都能實現主時鐘和從時鐘的功能,但一個系統內只能有一個主時鐘,整個系統中的最優時鐘為主時鐘,它具有最好的穩定性和精確性等。根據各節點的時鐘精度、級別以及通用協調時間(universal time coordinated,UTC)的可追溯性等,系統采用最優主時鐘算法來自動選擇系統內的主時鐘。典型的主從時鐘關系示意圖如圖1所示。
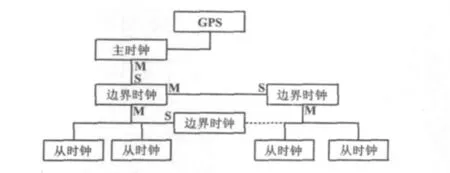
圖1 主從時鐘關系示意圖Fig.1 Relationship between master and slave clocks
PTP的參考體系結構如圖2所示[3],協議層包含3個通信接口:端口接口、時間戳接口和時鐘接口。端口接口用來分配和接收PTP信息。時間戳接口通過對同步報文加蓋時間戳來實現精確時鐘同步,可以根據精度要求決定采用是硬件還是軟件產生的時間戳。時鐘接口能夠對本地時鐘進行讀寫操作,達到絕對時間和頻率與主時鐘的同步。該接口包含了與時鐘同步質量(如精確度、穩定度等)密切相關的控制算法。
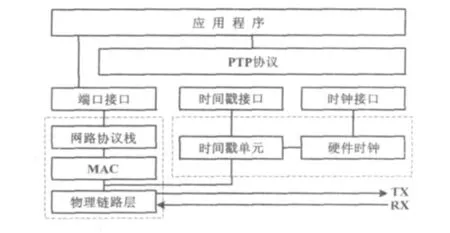
圖2 PTP參考體系結構Fig.2 PTP reference architecture
2 精確時鐘同步協議的算法
精確時鐘同步協議(PTP)采用分層的主從模式進行時鐘同步,同步的基本原理是對發出和接收的報文時間進行記錄,每條報文都有時間戳信息。主時鐘周期性發布時間同步報文,從時鐘根據接收到的同步報文的時間戳信息,計算出主從線路報文傳輸的時間延遲和主從時鐘的時鐘偏移,并相應地調整本地時間,使從時鐘保持與主時鐘一致的頻率與相位。系統據此實現主從時鐘的頻率同步和時間同步。時鐘同步的精度主要依賴于計數器頻率的準確性和鏈路的對稱性[4]。
PTP定義了4種多點傳送的報文:同步報文、跟隨報文、延遲請求報文和延遲應答報文。這些報文的交互順序如圖3所示,收到的信息回應與時鐘當前的狀態有關。
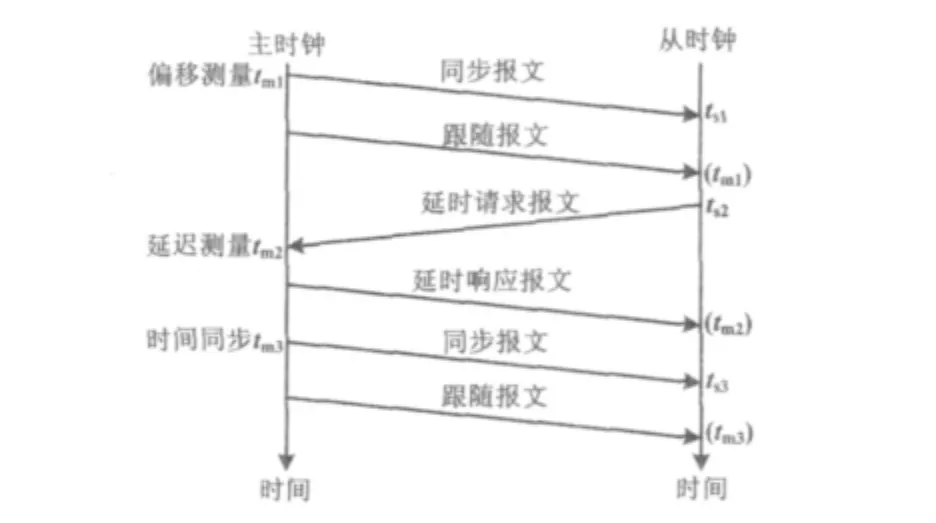
圖3 偏移和延遲的測量Fig.3 Measurement of time offset and delay
2.1 偏移和延遲測量
為了描述分布式控制系統的時鐘同步問題,我們以一個主時鐘和一個從時鐘的同步過程為例,其具體算法說明如下。
①主時鐘按照定義的間隔時間(缺省是2 s)周期性地向從時鐘發送“同步報文”,這個報文的時間戳是主時鐘打上的預計發送時間。該報文在接收端由從時鐘記錄下接收時間ts1。PTP支持由硬件輔助在物理層或接近物理層的位置檢測和記錄時間戳,以便提高同步時鐘的精度。
②主時鐘向從時鐘發送“跟隨報文”,此報文包含先前的同步報文準確的發送時間tm1。
假設系統的網絡延遲時間為tDelay,從時鐘和主時鐘的偏移時間為tOffset,則:

③從時鐘向主時鐘發送“延時請求報文”(延時請求報文的間隔是獨立設置的),報文發送后由從時鐘記下準確的發送時間ts2,在主時鐘端記錄準確的接收時間tm2。
④主時鐘向從時鐘返回一個“延時響應報文”,此報文包含先前的“延時請求報文”的準確接收時間tm2,從時鐘利用這個接收時間和由它記錄的發送時間ts2,可以得到:

根據網絡鏈路的對稱性,由式(1)和式(2)可以計算出報文傳輸的平均延遲時間:

⑤重復步驟①,由主時鐘發送新的同步報文,可以在從時鐘端得到新的同步報文的接收時間ts3。
⑥重復步驟②,由主時鐘發送新的跟隨報文,可以得到新的同步報文的準確發送時間tm3。
則主從時鐘的偏移為:

根據求出的偏移tOffset和延遲tDelay,如果目前的從時鐘時間為tsOld,則可以計算出目前應該同步到的新的從時鐘時間tsNew:

據此,在接下來的一個同步周期內,就可以實現從時鐘和主時鐘的同步。以上是整個時鐘同步過程的具體步驟。
在實際的分布式應用中,同步報文和跟隨報文的發送是按照定義的時間間隔周期性發送的,延遲請求報文和延遲應答報文發送間隔可以是不規則的,其測量間隔時間(缺省值是4~60 s之間的隨機值)比偏移值測量間隔時間要大[5],這樣做可以減輕網絡尤其是終端設備的負荷。
2.2 速率校正
IEEE 1588采用時間分布機制和時間調度概念,系統內的從時鐘設備可使用普通振蕩器,通過軟件調度與主時鐘保持同步。
速率校正通過測量每個報文從主時鐘開始與到達從時鐘之間的差異,計算出從時鐘頻率相對于主時鐘頻率的一個基本比值來校正頻率差。由于報文延時偏差可能很明顯,有可能使任何單一的速率測量有很大的不精確性,因此,可以利用平均路徑延時測量來檢測短時報文,并使用這些報文檢測從時鐘對主時鐘的頻率偏移[6]。
為避免從時鐘的抖動和振蕩,維持時鐘的單調性,精確時鐘同步協議(PTP)沒有立即用前面得到的時鐘偏差直接調整本地時鐘,而是把對PTP節點本地時鐘的校正處理看作一個鎖相環,通過一個環路濾波器轉換為一個對可變頻率振蕩器的控制量來控制振蕩器的振蕩頻率,從而間接調整系統的從時鐘[7]。
3 報文時間戳的生成
PTP可以由軟件記錄報文的發送時間戳和接收時間戳,也可以由硬件記錄。如圖4所示,PTP支持在物理鏈路層A、驅動程序層B和應用軟件層C處檢測和記錄報文發送和接收的時間戳。越靠近物理鏈路層,同步精度越高;越靠近應用軟件層,同步精度越低。早期的網絡時間協議(NTP)是只有軟件控制的同步協議,只在應用軟件層打上時間戳,因此同步的精度不高;而PTP為了提高系統的時鐘同步精度,既使用軟件,也使用硬件和軟件配合,能獲得更精確的定時同步。PTP支持硬件輔助在物理鏈路層檢測和記錄報文的時間,從而把報文從驅動程序到應用軟件處理的不確定時間延遲排除在系統精度的分析之外[8]。
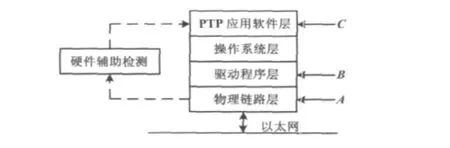
圖4 報文時間戳的檢測和記錄Fig.4 Detection and record of message timestamp
目前已有多種芯片和微控制器支持PTP時間戳硬件實現,常見的有美國國家半導體的DP83640芯片、Silicon Labs公司生產的Si5315芯片和飛思卡爾的ColdFire MPU等,也可以采用FPGA設計實現。當采用硬件輔助檢測和記錄PTP報文的時間戳時,即在以太網物理層(PHY)中放置這些器件,一旦線路上有PTP包,即被這些器件讀取[9]。因此,支持PTP時間戳的硬件功能實現是保證時間同步精度的關鍵器件。采用此設計方法的一個優點是僅需替換掉以太網物理層并增加IEEE 1588 PTP軟件,便可將這種解決方案添加到已有的產品設計中,從而避免轉換到新的處理器系列或開發輔助FPGA的復雜過程。
采用DP83640芯片實現以太網時鐘同步的系統結構圖如圖5所示。
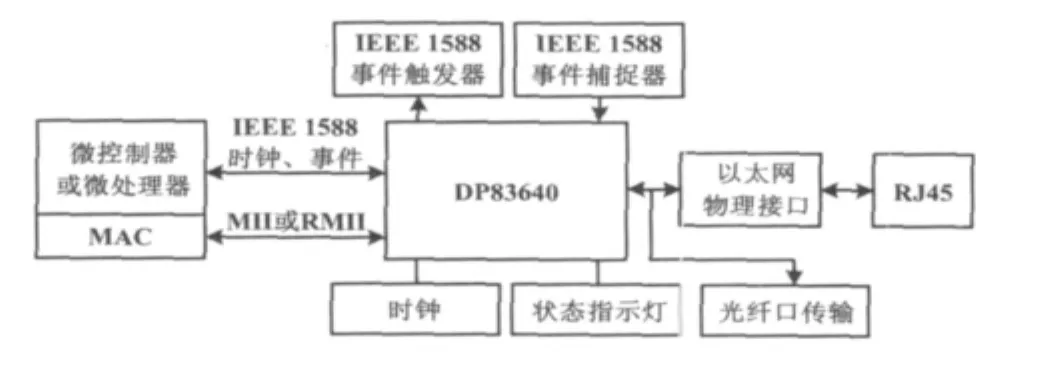
圖5 系統結構圖Fig.5 Structure of the system
當采用PTP時,本地時鐘相對于主時鐘的同步時鐘精度可由PTP的標準差(或稱均方差)表示,PTP的標準差基于Allan標準差,Allan標準差σy(τ)的估計如式(6)所示:

式中:xk、xk+1、xk+2為對應時間 tk、tk+ τ、tk+2τ的樣本測量值;τ為樣本測量的時間間隔;N為樣本總數。Allan標準差是對時基振蕩器頻率變化的二階統計,PTP標準差則是對測量時鐘和本地參考時鐘的偏差統計,PTP方差定義為:

由式(6)和式(7)可得PTP的標準差無偏估計的計算如式(8)所示:

式中:xk、xk+1、xk+2為對應時間 tk、tk+ τ、tk+2τ的測量值;τ為樣本測量的時間間隔;N為樣本總數。
測試系統時鐘同步精度的方法有多種,最常用的是通過示波器觀察秒脈沖信號(pulse per second,PPS)的波形[10]。
為了使測試的精度能夠滿足實際的工程應用,對不同情況下的以太網網絡負載分別進行了相應的測試,測試系統的組成如圖6所示。
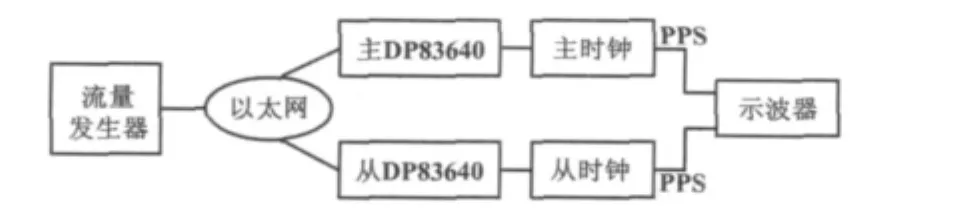
圖6 同步精度測試系統的組成Fig.6 Compositions of the test system for synchronization accuracy
設置主時鐘和從時鐘在某一頻率點產生一個時鐘輸出,然后比較這兩路時鐘信號。采用秒脈沖測量是由于秒脈沖信號一般從數字輸出中產生,雖然會對同步結果增添額外的誤差,但是附加的誤差僅會影響數字輸入和輸出,而不是同步時鐘本身,因此不會包括在同步測量中[11]。時鐘同步精度秒脈沖測試結果如表1所示。
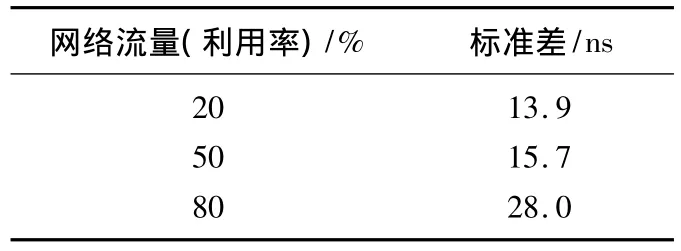
表1 測試結果Tab.1 Test result
由表1可知,當網絡負載在80%時,從時鐘和主時鐘的同步精度在28.0 ns的標準差內,完全能夠滿足分布式控制系統的時鐘需求。
4 結束語
隨著分布式測量和控制系統控制節點規模的不斷增大,節點間的距離分散化和數據傳輸的網絡化,使節點間的時鐘同步變得愈加重要。依靠傳統的專用線纜的方式同步系統時鐘,只會增加系統的復雜性、降低系統的可靠性。
IEEE 1588精確時鐘同步協議的出現,為分布式測控系統的時鐘同步提供了一種切實可行的途徑。由于PTP的應用建立在系統的通信網絡(不局限于以太網)上[12],不需要為時鐘的傳遞布置特別的網絡,只需在原有網絡上添加時鐘同步報文。這些報文只占用少許的網絡資源,它們和控制數據包或其他信息包共享網絡,具有較低的網絡開銷,在不需要太多資源的情況下,就能實現微秒級的高精度時鐘同步[13]。
IEEE 1588標準的精確時鐘協議,代表了控制網絡時鐘同步技術發展的新趨勢,值得進一步的研究和應用推廣。
[1]IEEE Instrumentation and Measurement Society.IEEE Std 1588-2008 IEEE standard for a precision clock synchronization protocol for networked measurement and control systems[S].New York,NY 10016-5997,IEEE-SA Standards Board,2008.
[2]International Electrotechnical Commission.IEC 61588-2009 Precision clock synchronization protocol for networked measurement and control systems[S].IEC under Licence from IEEE,ISBN2-8316-1026-3,2009.
[3]Mahmood A,Gaderer G.Timestamping for IEEE 1588 based clock synchronization in wireless LAN[C]//ISPCS 2009 International IEEE Symposium on Precision Clock Synchronization for Measurement,Control and Communication.Italy,2009:63-68.
[4]Rodrigues S.IEEE 1588 and synchronous Ethernet in telecom[C]//ISPCS 2007 International IEEE Symposium on Precision Clock Synchronization forMeasurement,Controland Communication.Gaderer,2007:138-142.
[5]魏豐,孫文杰.IEEE 1588協議時鐘同步報文的精確時間標記方法研究[J].儀器儀表學報,2009(1):162-169.
[6]王颋,王平,向敏.EPA網絡控制系統時鐘同步主時鐘控制算法研究[J].系統仿真學報,2009(1):146-151,156.
[7]朱寶,楊順昆.實時分布式仿真測試平臺時鐘同步算法[J].計算機工程,2010(24):231-232,235.
[8]王波,呂俊偉,于振濤.基于D-S的時鐘同步競爭安全算法[J].電訊技術,2011(1):61-67.
[9]李學橋,陳園,梁爽.基于IEEE1588協議的精確時鐘同步算法改進[J].計算機工程與科學,2011(2):42-45.
[10]章涵,馮冬芹,褚健.基于透明傳輸的數控系統時鐘同步算法[J].計算機集成制造系統,2010(4):873-877.
[11]魯立,馮冬芹,褚健,等.傳輸時延和時鐘同步對以太網控制系統的影響[J].控制理論與應用,2010(6):793-798.
[12]于會游,周春暉,許希斌,等.分組通信網絡時鐘同步研究及性能仿真[J].計算機仿真,2009(5):173-178.
[13]蔡君,范馨月,周非.分組網絡時鐘同步算法的研究[J].電信科學,2010(S2):227-231.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
