一種發電機功角實時測量裝置的實現
2012-07-26 11:04:14徐化東
自動化儀表 2012年2期
徐化東 黃 琦 井 實
(電子科技大學自動化工程學院,四川 成都 611731)
0 引言
發電機功角是反映電力系統穩定的重要參數之一,實時精確地獲取發電機功角是實現電力系統監視和控制的關鍵。
發電機功角測量通常有計算法和直接測量法兩種。計算法在電機穩態運行時具有較高的測量精度,但在電機暫態運行時存在精度不高和算法復雜等缺點[1]。傳統的直接測量法可以得到電機暫態和穩態運行時的功角,但存在誤差大和對環境要求高等缺點[2]。
本文在發電機絕對內電勢角定義的基礎上[3],利用改進的測量法,設計了發電機功角實時測量裝置。該裝置采用DSP+CPLD控制結構,通過測量發電機機端的電壓、電流,鍵相脈沖與GPS矢量的夾角(鍵相脈沖相角),得到發電機功角。DSP和CPLD芯片計算能力強大,兩個芯片分工協作,使裝置可以實現發電機暫態和穩態運行時功角的實時測量,且測量精度高。
1 發電機功角測量原理
由于GPS秒脈沖信號與國際標準時間同步誤差小于1 μs[4],因此,通常以 GPS 作為發電機功角測量系統中的標準時間。當使用GPS作為標準時間時,絕對內電勢角就是內電勢相量與GPS參考矢量之間的夾角。
發電機功角測量原理如圖1所示,鍵相脈沖矢量與發電機內電勢相量存在恒定的初始角度θ。鍵相脈沖與GPS矢量的夾角為φi(i為測量次數),則絕對內電勢角Φi=φi+θ。
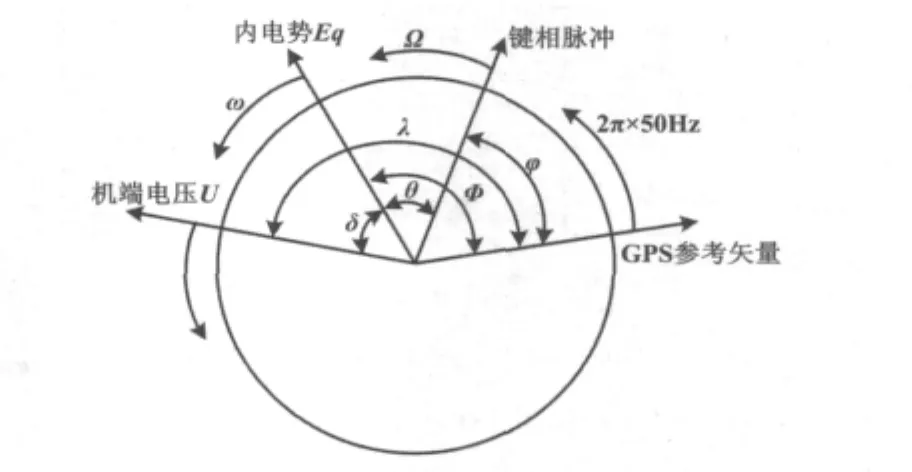
圖1 發電機功角測量原理圖Fig.1 The measuring principle of power angle of generator
對于初始角θ的整定,文獻[2]提出了過零檢測法,但這種方法要求精確地判斷零位,實現難度較大。本文的整定方法是:在電機穩態運行時,功角δ0是固定不變的,機端電壓向量與GPS矢量之間的夾角λ0通過對機端電壓信號處理得到,鍵相脈沖矢量與GPS矢量的夾角φ0可以直接測量得到,則初始角θ=λ0-φ0-δ0。由此可得到發電機實時功角為 δi=λi-Φi。
2 裝置硬件電路設計
測量裝置硬件電路包括電流電壓互感器、模擬低通濾波器、鍵相脈沖采集電路、加法器、CPLD芯片EPM1270T144及其外圍電路、A/D轉換芯片ADS7864和DSP芯片TMS320F2812最小系統。電路硬件結構如圖2所示。
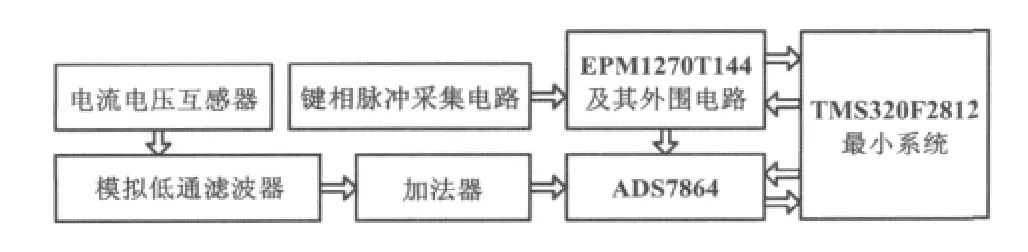
圖2 硬件結構框圖Fig.2 The scheme of hardware structure
2.1 低通濾波器設計
在測量中裝置只需要基波信號,因此,濾波器選擇為低通濾波器。濾波器指標為f=10fc,幅度衰減大于30 dB,通帶內電壓放大倍數 Au=2,截止頻率 fc=100 Hz。為滿足幅度衰減并保證電路性能穩定,濾波器電路選擇二階壓控電壓源低通濾波電路形式[5]。根據通帶內電壓放大倍數和截止頻率的指標要求,濾波電路電容、電阻值分別整定為 C1=C2=0.1 μF,R1=11.256 kΩ、R2=22.508 kΩ、R3=R4=67.528 kΩ。
2.2 裝置數字電路設計
數字電路部分包括CPLD芯片EPM1270T144及其外圍電路、A/D轉換芯片 ADS7864和 DSP芯片TMS320F2812最小系統。數字電路結構如圖3所示。
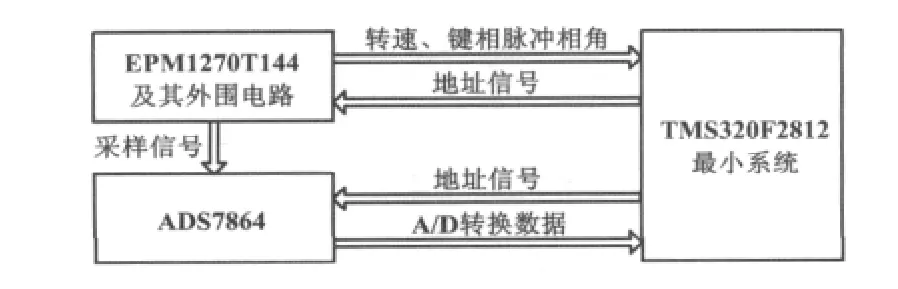
圖3 數字電路結構框圖Fig.3 The scheme of digital circuit structure
CPLD優點突出[6],其外圍電路由有源晶振、電源模塊和復位模塊構成。CPLD的主要工作是:根據接收到的GPS信號,為ADS7864提供多通道同步采樣信號;接收鍵相脈沖信號,計算發電機的轉速、鍵相脈沖相角,并將計算結果傳給DSP。通過CPLD輸出同步觸發采集信號,可以實現不同地點的發電機實時功角和轉速的同步采集。本文使用了Altera公司生產的CPLD芯片EPM1270T144。
TMS320F2812最小系統的具體工作是:接收ADS7864傳輸的模數轉換結果,判斷發電機是否處于穩態運行,在電機穩態運行時,整定初始位置角;接收CPLD傳輸的轉速、鍵相脈沖相角等信息;計算本文需要的發電機功角。
3 裝置軟件設計
測量裝置軟件設計主要是計算發電機轉速和鍵相脈沖相角,實現相量測量算法(包括傅里葉變換和傅里葉修正算法)、相位補償和絕對內電勢角測量算法等數據處理過程以及發電機功角計算。軟件流程如圖4所示。
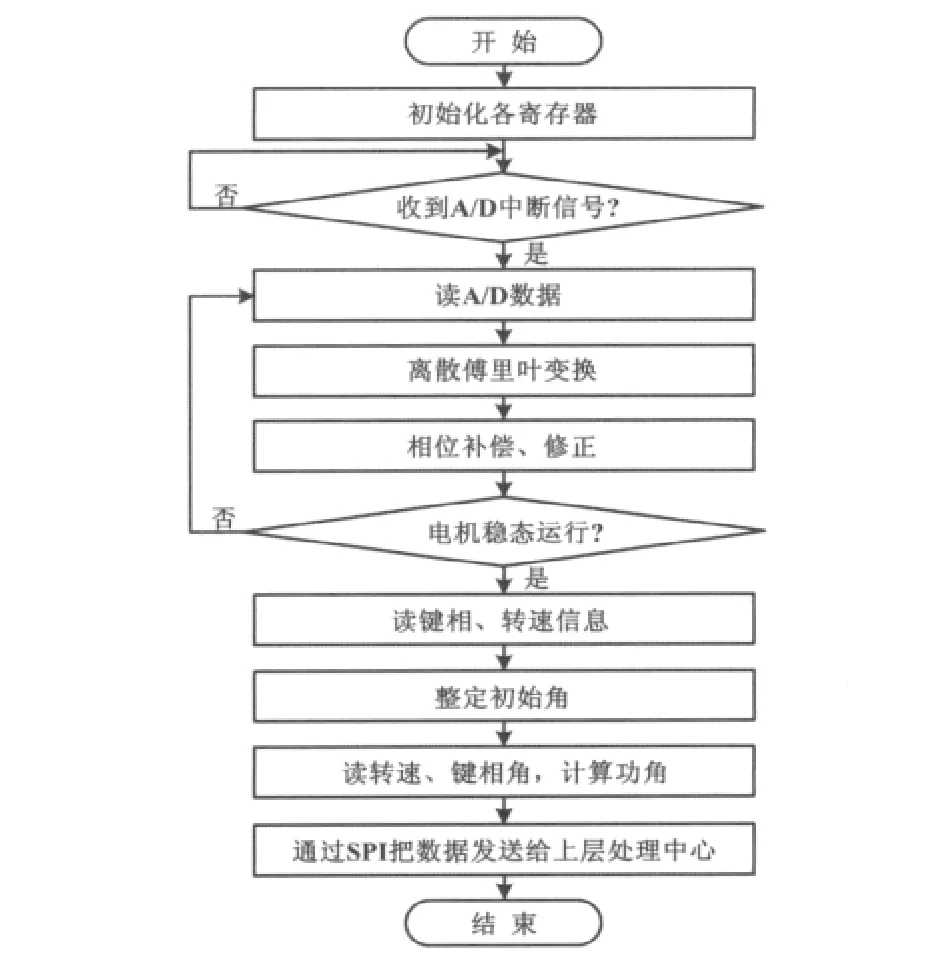
圖4 軟件流程圖Fig.4 Flowchart of software
相量測量算法主要有過零檢測法和離散傅里葉變換(discrete Fouriet transformer,DFT)法。DFT法可以準確地求出信號中的基波分量,且具有較好的濾波效果。因此,本文利用DFT法求取基波信號相量。根據《電力系統實時動態監測系統技術規范》的規定,裝置在設計中采用96點的傅里葉變換。對于變換點數是非2N的傅里葉變換,本文采用Winograd快速傅里葉變換(Winograd FFT)。該算法是 S.Winograd于1976年提出的。Winograd快速傅里葉算法實現過程如下。
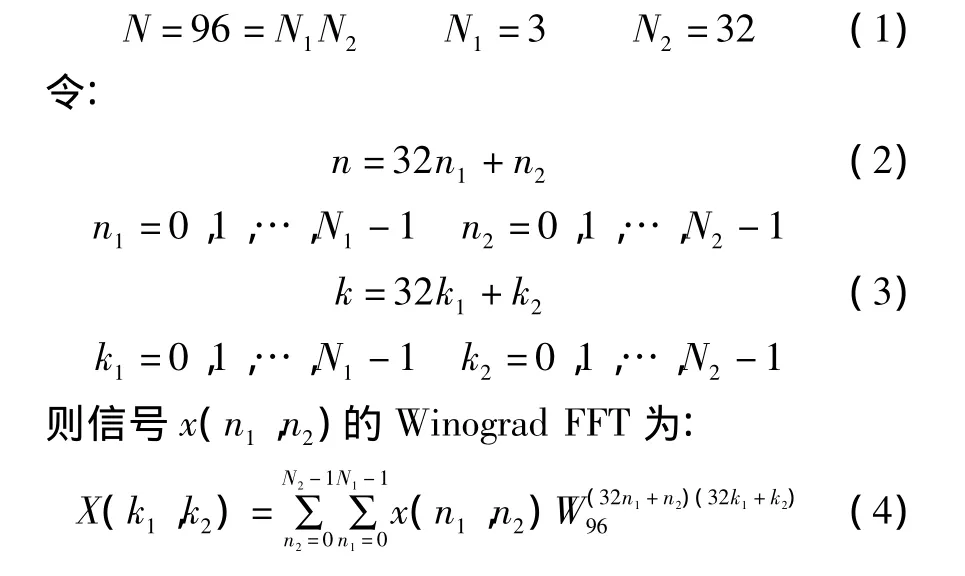
選擇不同的 k1、k2數值,就可以求出 X(0)、X(1)、…、X(95)。在式(4)中,總共要進行3456次復數乘,小于直接計算DFT需要的9216次復數乘,有助于實時性的實現。在測量裝置的設計中,采樣頻率是4800 Hz。因此,Winograd FFT頻率分辨率為50 Hz。若X(0)表示直流分量,則X(1)表示基波分量。利用X(1)就可以求出基波信號的幅值和相角等信息。裝置在軟件設計中只計算X(1),減少了計算時間,保證了實時測量。
為驗證算法的準確性,本文在Matlab中對算法進行了驗證,并將計算結果與Matlab中自帶的FFT函數進行了比較。
對信號y(t)=31cos(100πt+0.1)進行96點采樣,得到數組Y(N)。Winograd快速傅里葉算法計算結果和Matlab中FFT計算結果如表1所示。
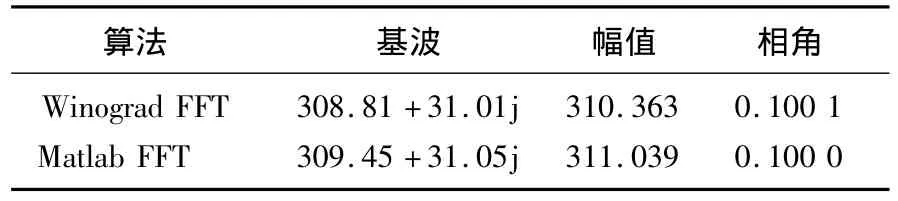
表1 計算結果對比Tab.1 The comparison of calculation results
由表1可以看出,測量裝置運用的Winograd FFT可以較為精確地計算基波信號的幅值和相角。為了消除或減小由于非整數倍采樣所造成的DFT計算誤差,需要對DFT算法進行修正,以提高測量的精度。由于裝置在設計中使用的是模擬濾波器,信號相位存在滯后現象,在得到基波相位后必須進行補償,以得到實際的相位。濾波器相頻特性曲線如圖5所示。
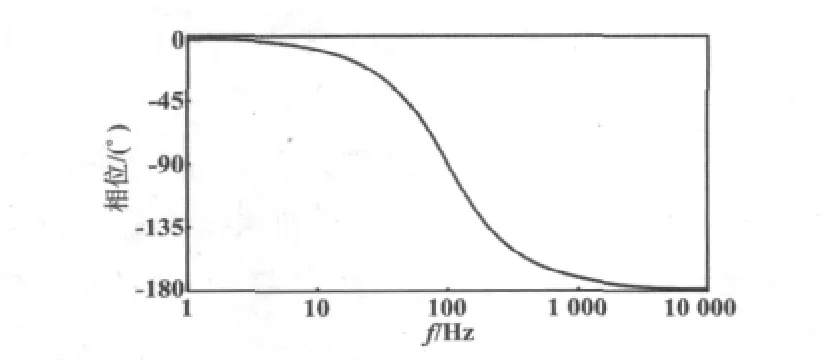
圖5 相頻特性曲線Fig.5 The phase-frequency curve
從圖5可以看出,在48~54 Hz頻率段,相頻特性曲線近似為直線,對這個頻率段進行一次曲線擬合得到的相位與頻率函數為:

4 測量結果與分析
設計完成后,該裝置在實驗室的WDT-ПC型電力系統綜合自動化實驗臺上進行了測試,首先進行精度測試。在發電機穩態運行時,對由裝置測量得到的功角與用計算法得到的功角進行比較并取差,差值作為誤差來檢驗裝置測量的準確性。裝置測量功角誤差曲線如圖6所示。
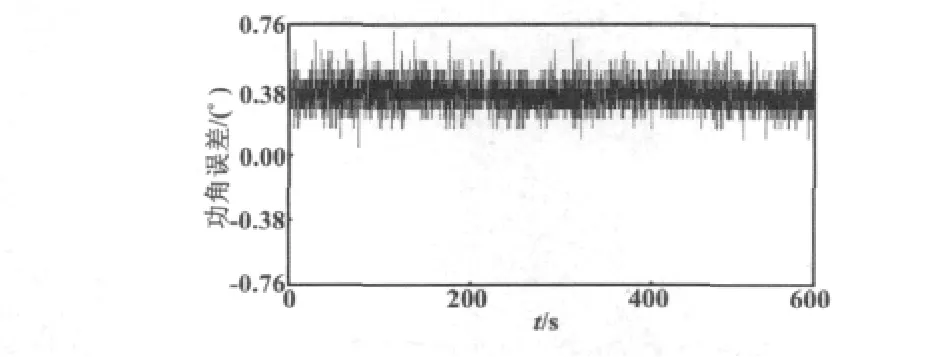
圖6 測量裝置功角誤差曲線Fig.6 The error curve of measurement device for power angle
從圖6可以看出,在電機穩態運行時,裝置測量功角與計算法功角最大差小于0.7°,說明測量裝置滿足設計要求。由于裝置作為實驗室電力系統廣域測量研究平臺的一部分研究內容,最終要實現的是多臺發電機的同步測量,因此,本文將兩臺裝置在同一實驗臺上進行同步測試。裝置功角測試同步誤差曲線如圖7所示。
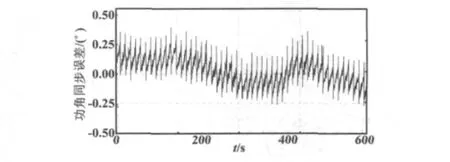
圖7 同步誤差曲線Fig.7 The synchronous error curve
在采用同步采樣晶振誤差為10×10-6時,最大同步功角誤差小于0.4°,可以滿足電力系統廣域測量的要求[7-8]。
裝置實驗室測試完成后,在四川省電力試驗院進行了應用測試。運用實時數字仿真儀(real-time digital simulator,RTDS)建模,構建四川省大規模電網仿真平臺,對模擬的太白某發電廠監測點進行功角測試,得到的實時功角測試曲線如圖8所示。
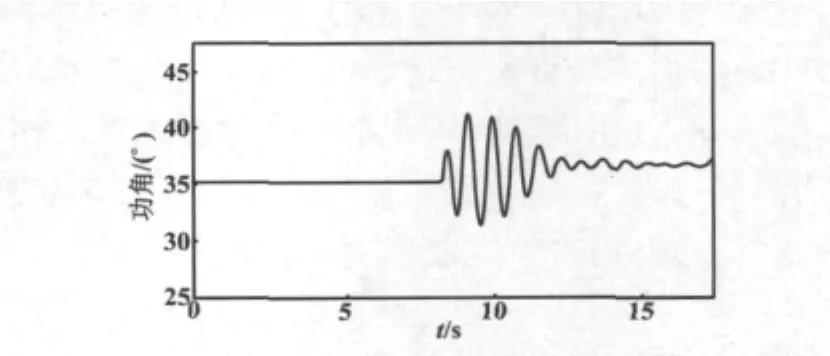
圖8 實時功角測試曲線Fig.8 The real-time test curve of power angle
RTDS設置發電機組在運行一段時間后發生故障,功角出現振蕩,而從圖8所示的功角曲線可以看出,裝置測量功角在某段時間出現振蕩,與RTDS設置結果相同。因此,裝置可以用于電力系統中發電機功角的實時測量。
5 結束語
本文基于發電機絕對內電勢角的測量方法,采用DSP+CPLD結構,設計了一種實時發電機功角測量裝置。該裝置采用改進的直接測量法,不需要過零檢測,可以精確地實現發電機功角的實時測量。測試結果表明,本文設計的功角測量裝置,測量精度較高、同步效果好,且現場抗干擾能力強,可以實現發電機功角和轉速的實時測量,滿足廣域測量系統的測量要求,為電力系統監控提供了參考。
[1]梁振光.發電機功角的實時計算方法[J].繼電器,2004,32(1):12-14.
[2]嚴登俊,鞠平,吳鋒,等.基于GPS時鐘信號的發電機功角實時測量方法[J].電力系統自動化,2002,26(8):38 -40.
[3]張昀,蔣映霞.同步發電機絕對內電勢角測量方法研究[J].四川電力技術,2006,29(3):36 -38.
[4]耿池勇,高厚磊,劉炳旭,等.基于同步相量測量技術的功角監測系統[J].電力系統及其自動化學報,2003,15(3):17 -19.
[5]駱新全,吳小泉,李行星.電子電路與系統實驗[M].北京:中國廣播電視出版社,2009:176-178.
[6]張永偉,尹項根,李彥武,等.CPLD在斷路器在線監測數據采集系統中的應用研究[J].電力自動化設備,2003,23(4):34 -37.
[7]許樹楷,謝小榮,辛耀中.基于同步相量測量技術的廣域測量系統應用現狀及發展前景[J].電網技術,2005,29(2):44 -49.
[8]張勝.同步相量測量標準化的有關問題討論[J].電力系統自動化,2007,31(2):91-93.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:25:42
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
大電機技術(2017年3期)2017-06-05 09:36:02
軍事文摘(2016年16期)2016-09-13 06:15:49
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
