多參數水質監測儀流路系統設計
2012-07-26 11:04:18溫志渝魏康林陳松柏
自動化儀表 2012年2期
郭 建 溫志渝 魏康林 陳松柏
(新型微納器件與系統技術國防重點學科實驗室1,重慶 400044;微納系統及新材料技術國際研究中心2,重慶 400044)
0 引言
多參數水質監測是現代環境科學技術的重要發展方向之一[1],而對多參數水質監測儀器而言,流路系統的設計是關鍵技術。流路系統必須具有多樣品多試劑順序進樣、流路切換和試樣的精確抽取等功能。現有的流路系統大都采用基于多位閥與注射泵的順序注射流路[2]。該流路雖然具有試樣間多流路通道快速切換和試樣的高精度抽取功能,但注射泵的價格很高,如果采用基于多位閥與注射泵的順序注射流路系統來設計在線水質檢測儀器,就會增加成本,難以滿足產業化的要求[3]。
為此,本文提出一種基于微電子多位閥與微型步進電機蠕動泵的集成化多樣品多試劑順序進樣、順序檢測流路系統。該流路具有小體積、低功耗、低成本的優勢。經反復在線測試,系統滿足快速切換(切換時間≤2 s)和精確進樣(準確度為±2%)的在線水質檢測要求,且流路系統具有高效自動清洗的功能,可以極大程度地降低交叉污染,保證水質檢測精度。
1 流路系統設計
1.1 流路總體設計
針對多個水質參數的檢測,各個參數對應的樣品和反應試劑通過多位閥的切換和經蠕動泵的抽取進入流通檢測池。在流通池內反應平衡后,即通過光譜分析檢測樣品中該參數的含量,然后清洗流路系統(即公共流路和檢測池),并依次進行下一個水質參數的檢測。按照項目要求,系統以氨氮、陰離子表面活性劑、Cr6+(六價鉻)、化學需氧量、Pb2+(鉛離子)、總酚和總磷7個水質參數為檢測對象。
為了實現對7個水質參數進行在線水質監測的要求,設計了以AT89C55單片機為核心控制器的流路控制系統,分別控制多位閥對試樣的流路切換和蠕動泵對試樣的精確抽取。
流路系統如圖1所示。流路系統選擇Valco公司的24位閥,流路通徑為0.6 mm,無死體積,交叉污染小,適合有效的流路切換和高精度進樣[4]。24位閥的各個流路通道(定子)分別與蒸餾水、待檢水樣、空氣以及各個水質參數對應的標準樣品溶液、反應試劑相連通。其中,公共通道(轉子)連接微型步進電機蠕動泵,控制轉子的轉動即可實現各個試樣間的流路切換,各參數對應的反應樣品與試劑通過蠕動泵的精確定量抽取進入流通檢測池。
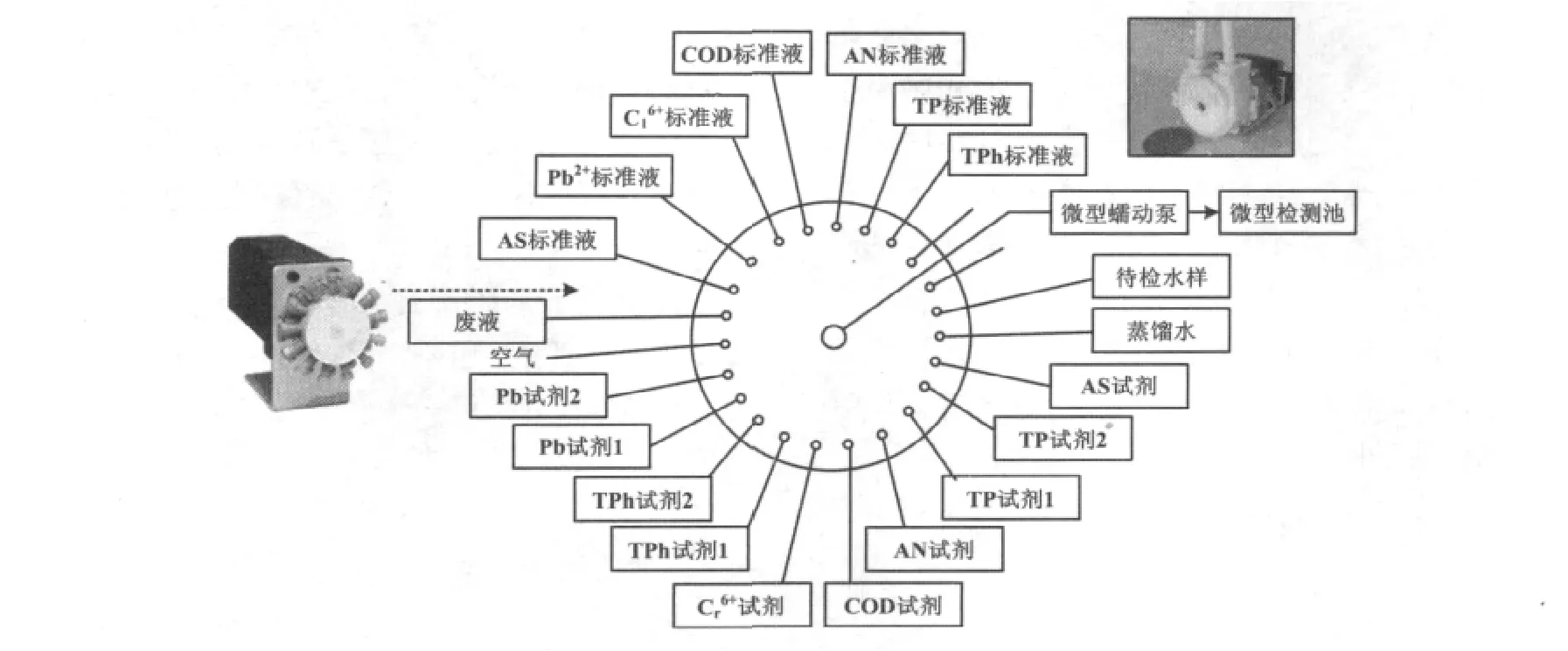
圖1 流路系統框圖Fig.1 Block diagram of flow path system
1.2 流路切換模塊設計
24位多位閥具有多通道選擇切換的功能,其轉子可相對定子準確地以任意15倍數的角度在正、反向旋轉。閥的公共通道與轉子連通,轉子在步進電機的帶動下正反轉動,即可與閥上的各定子連通,從而使蠕動泵通過公共通道抽取不同的試樣,實現流路切換功能[5]。多位閥的工作原理示意圖如圖2所示。
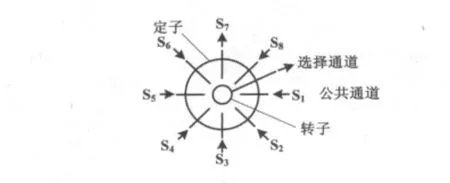
圖2 多位閥工作原理Fig.2 The working principle of multi-position valve
針對Valco公司的24位閥驅動器的控制,本文設計了基于AT89C55單片機的多位閥自動控制系統。系統通過8位BCD碼來實現多位閥公共口(轉子)與其他各通道(定子)連接的流路切換控制。
單片機的P0口通過上拉電阻直接與多位閥控制器的IN口相連,把轉子的轉動命令(即所需要轉到的位置)發送給多位閥驅動器。
單片機的P2.0口與多位閥驅動器的DIR命令端口連接,可以向驅動器發送控制多位閥的轉向命令,使其以最短途徑轉到指定位置。如果轉到位置與現在位置之差小于12位,則多位閥正轉到指定位置;如果轉到位置與現在位置之差大于12位,則多位閥反轉到指定位置。
單片機的P1口與多位閥的OUT口連接,讀出轉子現在的位置,從而判定多位閥的走位是否正確,如果不正確,則通過ERROR發送中斷。單片機的P2.1端口用來給驅動器HOME端口發送復位信號[6]。多位閥控制模塊如圖3所示。
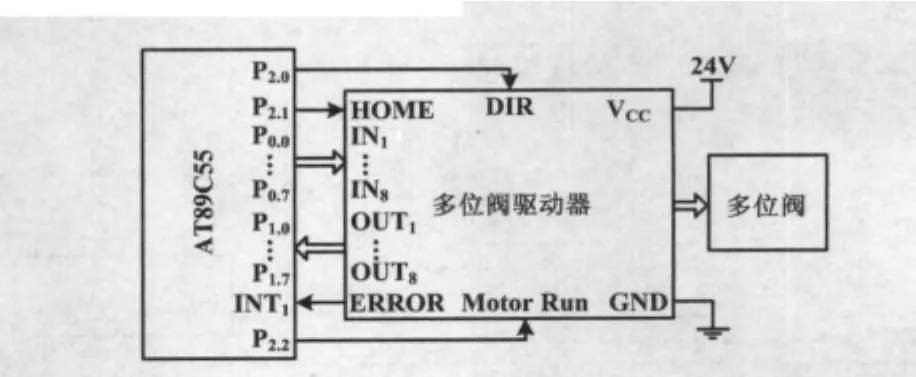
圖3 多位閥控制模塊Fig.3 Multi-position valve control module
1.3 進樣模塊設計
微型步進電機蠕動泵采用的是高精密兩相步進電機驅動,步進電機是將電脈沖信號轉變為角位移或線位移的開環控制元步進電機件。在非超載的情況下,電機的轉速和停止的位置只取決于脈沖信號的頻率和脈沖數,而不受負載變化的影響;可以通過控制脈沖個數來控制角位移量,從而達到準確定位的目的;同時,可通過控制脈沖頻率來控制電機轉動的速度和加速度,以達到調速的目的。
電機的驅動電壓為12 V,最大流量22 mL/min,在連續運轉的情況下,電機的壽命為5000 h。電機采用全新的電流控制技術實現電流的精確控制,其有效降低了輸出力矩脈動、提高了細分精度;并且可以將電機的損耗降低25%,達到減小電機溫升的效果。
AT89C55單片機與微型步進電機蠕動泵的驅動板的連接圖如圖4所示。
圖4中,RST為復位控制,EN為使能控制,DIR為方向控制,STEP為脈沖個數及頻率控制。編寫控制程序,單片機通過P2.6端口向蠕動泵驅動模塊的STEP端口發送精確脈沖信號。通過改變脈沖信號的頻率來更改蠕動泵的進樣速度,在需要系統清洗的時候使用最快速度,需要精確進樣的時候使用正常速度,以保證進樣精度。通過改變脈沖個數控制蠕動泵抽取所需的溶液量,反復進行試驗,直到微型蠕動泵的進樣誤差在1%以內[7]。單片機的 P2.5端口控制蠕動泵驅動板的DIR端口,可改變蠕動泵的旋轉方向,實現對儀器中導管的反沖清洗,減小各試劑間的交叉污染。
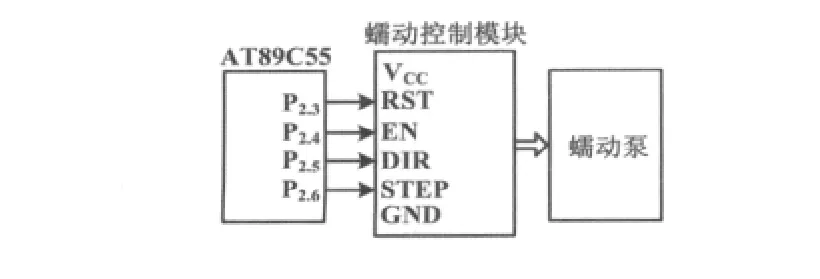
圖4 蠕動泵控制模塊Fig.4 Peristaltic pump control module
2 流路系統軟件設計
系統流路控制流程如圖5所示。
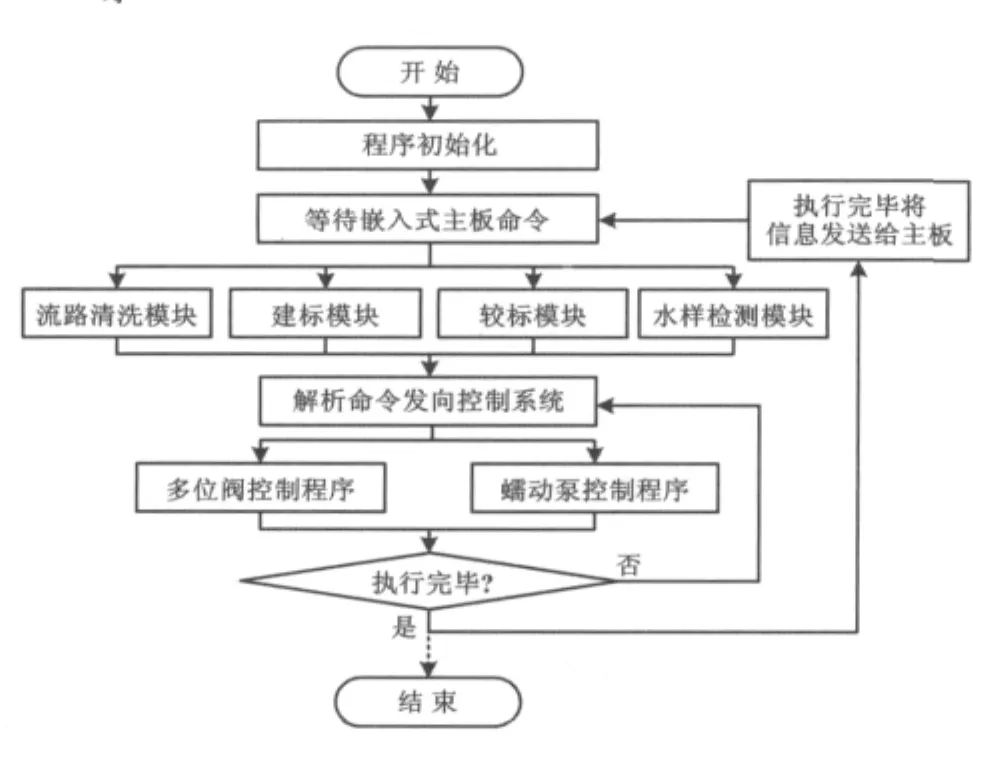
圖5 流路軟件流程圖Fig.5 The flowchart of flow path software
單片機控制軟件主要包括系統流路清洗模塊、系統建標模塊、系統較標模塊和系統檢測模塊。各模塊又由多位閥控制函數和蠕動泵控制函數組合而成[7]。
①流路清洗程序模塊主要是清洗流路系統中的管道和樣品檢測室。
②系統建標模塊是引進各種標準液和試劑到檢測室,以建立濃度與吸光度的標準曲線。
③系統較標模塊是引進已知濃度溶液和相應試劑到檢測室,以檢驗標準曲線的準確性。
④系統檢測模塊是引進待檢水和相應試劑到檢測室檢測。
程序通過串口與嵌入式系統進行通信,嵌入式系統發送各種指令使流路系統執行相應的工作,實現了流路的全自動化。該程序設置方便、靈活,控制指令可任意調用;程序穩定可靠,能保證進樣的精度和測試效果。
本文設計的該流路的各個入口可重新組合實現流路的二次開發,并用于測量其他不同的各種指標,加上良好的通信接口,可大大擴展該流路系統的應用范圍。
3 試驗
3.1 抽取精度試驗
根據測量參數的標準溶液和反應試劑的進樣要求,流路系統需要能夠精確抽取測試所需的體積為0.3、0.6、0.9、1.2、1.5、3(單位:mL),為此,進行了流路系統抽取試驗。對各體積進行5次重復抽取的試驗數據表如表1所示。本試驗是通過高精度的電子天平讀取數據,讀取的準確度高、誤差小。
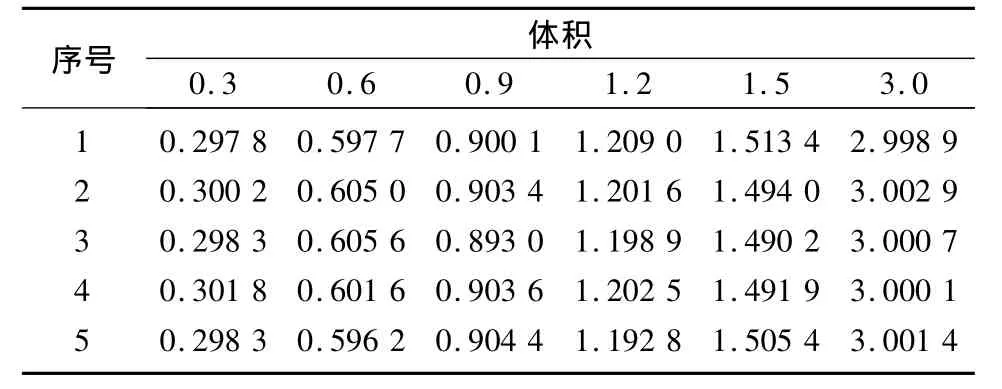
表1 精度抽取試驗數據Tab.1 The experimental data of extracting precision mL
從表1的測試數據可以看出,各次測量與理論值(期望值)的相對誤差的絕對值小于2%(包括測量均值的偏差為0.6%),證明準確度很高,即流路系統具有很高的進樣準確度;其次,相對均值的誤差呈現出非常標準的隨機性,方差為 0.01,測量精密度很高[8],證明流路系統具有很好的重現性。
3.2 標準溶液測試試驗
為驗證流路系統的流路切換和試樣的精確抽取的功能,用多參數水質檢測儀對COD建標進行了試驗,分別測試總磷濃度為 0、0.05、0.1、0.15(單位:mg/L)的標準液的吸光度。試驗采用雙波長測試法[9],主波長為620 nm,參考波長為500 nm,則吸光度與濃度的直線方程為:

式中:A620、A500為待測物在620 nm、500 nm處的吸光度;K為靈敏度;C為待測物濃度;B為光程,水質檢測儀的光程為2 cm。
由多參數水質監測儀測量作出的標準曲線如圖6所示。
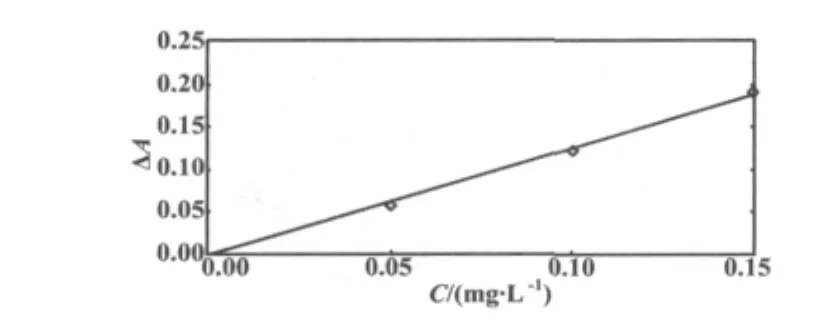
圖6 總磷的標準曲線Fig.6 The standard curve of TP
由式(1)得出ΔA=1.2565C,直線擬合的相關系數R2=0.9967,達到了檢測要求,說明該流路能夠穩定準確地實現流路切換、精確進樣和系統清洗等功能。
4 結束語
為滿足多參數水質監測儀測試7種參數的要求,本文設計了基于微電子多位閥和微型步進電機蠕動泵的集成化多樣品多試劑順序進樣和順序檢測流路系統。該流路系統進樣體積小、精度高,試劑間的交叉污染小,可節約試劑和減少廢液。
系統完全由微機控制,不同的分析過程不需改變流路體系結構,實現了流路系統的全自動化控制。該流路系統特別適合于對流路要求較多、可靠性和自動化要求較高的過程分析。
[1]王奎蘭,吳清平,鄧金花,等.水質快速分析技術現狀及發展趨勢[J].現代儀器,2005(5):54-56.
[2]周娜,趙燕,謝振位,等.順序注射及其在環境監測中的應用進展[J].現代科學儀器,2005(6):21 -27.
[3]Abulkibash A M.Sequential injection spectrophotometric determination of cyanide[J].Flow Injection Anal,2007,24(1):17 -21.
[4]魏彥林,馬惠昌.十六孔閥的功能組合及其在流動注射分析中的應用[J].分析儀器,2004(3):34 -40.
[5]成俊杰,于靖軍,孫明磊,等.新型順序注射分析系統的研制[J].軍民兩用技術與產品,2007(11):47-48.
[6]張友德,趙志英,涂時亮.單片微型機原理、應用與試驗[M].上海:復旦大學出版社,2003.
[7]Wang X,Huang K Z,Xu B,et al.Design for step motor control system of automatic biochemistry analyzer[C]//8th International Conference on Electronic Measurementand Instruments, ICEMI,2007:1607 -1612.
[8]楊虎,劉瓊蓀,鐘波.數理統計[M].北京:高等教育出版社,2004.
[9]費學寧.現代水質監測分析技術[M].北京:化學工業出版社,2005.
猜你喜歡
環境(2023年5期)2023-06-30 01:20:01
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
當代水產(2019年1期)2019-05-16 02:42:04
海峽科技與產業(2016年3期)2016-05-17 04:32:12
電子設計工程(2015年15期)2015-02-27 12:07:30
