基于動態稱重的高速公路超載車輛檢測系統★
2012-07-30 05:46:22曾江河
山西建筑 2012年9期
曾江河
(廣州市公路管理局工程研究所,廣東廣州 510420)
0 引言
超載運輸現象在我國十分普遍,不僅對公路、橋梁等造成非正常損壞,而且極易引發交通事故,危及人民生命和財產安全。因此,對公路超載運輸治理刻不容緩。
目前,國內治理超載問題的主要手段包括:靜態稱重或低速動態稱重、計重收費等,其中靜態稱重是在高速公路上設置超載檢測站,利用靜態稱重設備或低速稱重設備對超載車輛進行檢測,針對檢測結果進行處治;計重收費是車輛通過收費站出口時按照實際載重進行階梯式收費。基于靜態稱重和計重收費的超載治理方法過程復雜、檢測工作量大,由于對超載車輛的檢測時間較長,容易引發高速公路在超載檢測站的交通擁堵現象;另一方面現有的很多高速公路在建設期沒有預留用地建設超載檢測站,也沒有多余的空地安置超載貨物,人員配備也比較缺乏。這些問題在短時間內無法解決,因此迫切需要一種新的超載治理模式。
動態稱重系統WIM(Weigh-In-Motion)作為一種新的稱重技術,在國外得到了廣泛采用[2,3],WIM 的定義為:針對行進中的車輛,測量其動態輪胎壓力,以估計靜止車輛的重量的技術[4]。WIM系統包括一系列感應器和數據采集分析裝置,感應器檢測車輛到達以及相應的動態輪胎壓力,利用采集的數據進行分析以估計車輛重量、速度、軸距和車型。WIM的優點是稱重過程中不需要車輛停止。然而,WIM也有缺點,主要為:
1)與靜態稱重相比,WIM稱重不夠精確,根據美國的研究結果,WIM的稱重誤差在6%左右;
2)WIM容易受電磁干擾尤其在雷擊天氣中[5]。
本文在分析高速公路超載檢測系統功能需求的基礎上,以提高檢測效率、減少滯留車輛延誤時間為重點,運用動態預檢測手段,設計了一個高速公路超載車輛動態檢測系統,針對系統運行模式和關鍵參數進行了探討。
1 高速公路超載車輛檢測系統需求分析
1.1 高速公路超載問題特征
由于我國公路收費制度存在部分漏洞和缺陷,加之我國公路運輸市場的不規范、惡性競爭等原因,二、三級公路上超載運輸已成普遍現象。在高速公路,超載現象也時有發生,引發原因包括:不同地區(省份)關于超載標準不一致,部分收費入口缺乏計重設備,貨車在服務區配載等。
與普通公路相比,高速公路的超載后果更嚴重,高速公路運行速度高、車流量大,超載車輛一旦發生交通事故或壓垮結構物,將導致嚴重的交通安全問題和事故隱患。同時,在高速公路上如何識別超載車輛也變得極為關鍵,如果治超站點對每輛貨車進行測重,不僅加大治超工作人員勞動強度,而且測重車輛排隊將影響高速公路交通流運行,因此,治理高速公路超載問題顯得尤為重要。
1.2 高速公路超載檢測系統用戶需求
高速公路超載治理涉及多個部門,要設計多方聯動、合理的超載管理系統,首先必須明確其用戶需求。高速公路治超系統用戶包括:路政、收費站、交警、駕駛員、特殊貨物處理專家,各用戶需求如表1所示。
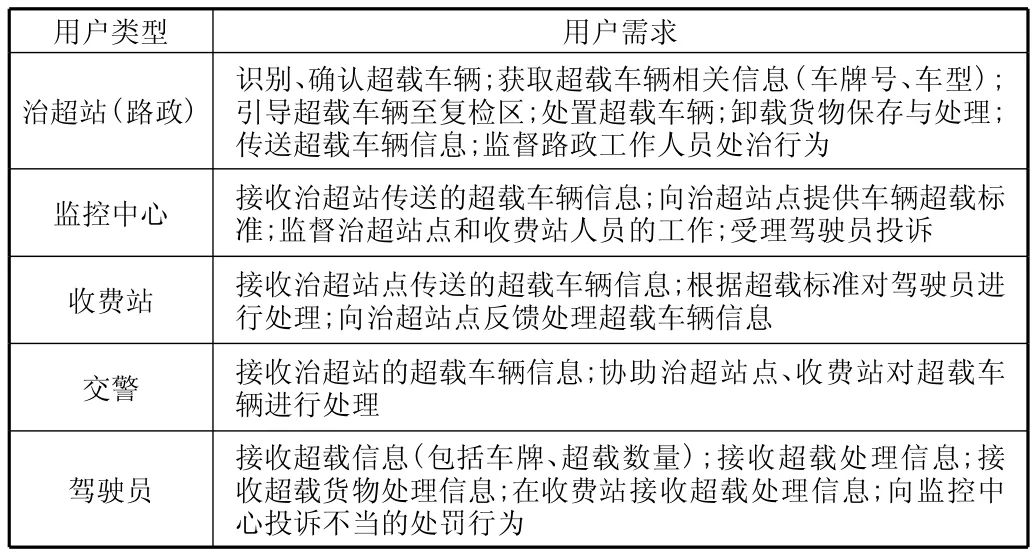
表1 高速公路超載檢測系統用戶需求
1.3 超載檢測系統功能需求
基于以上不同用戶的需求分析,本系統主要功能設定為:
1)高速動態“初檢”:車輛通過動態檢測區時無需減速或停車,系統能較準確地獲得車輛載重信息,并對超載車輛進行“初識別”。2)靜態“精檢”:系統對進入靜態檢測區(“復檢區”)的車輛進行精檢,確定其真實載重和超載與否。3)超載車輛信息識別:動態檢測系統判定貨車存在超載嫌疑后,系統能實時、準確讀取嫌疑車輛的車牌號碼,并將車牌號傳送至治超站控制器。4)超載信息發布:治超站控制器將“初檢”結果為“超載”信息,由動態信息板VMS向駕駛員發布;并將該信息發送給路政人員;當超載車輛拒絕停車進入“精檢區”強行闖關時,控制器將信息發送給前方治超站點或收費站。5)超載車輛誘導:結合VMS和路政人員向超載車輛提供超載信息,并引導其進入“復檢區”。6)超載貨物中轉:治超站針對超載車輛,提供卸載場地并保管。
2 超載車輛動態檢測系統方案
2.1 系統工作原理及流程
1)車頭接近感應線圈,系統自動觸發感應線圈和高速動態稱重器,對車輛進行稱重,同時車牌識別器被觸發,抓拍當前車輛圖像,將抓拍圖像傳送至控制計算機,提取車輛信息包括:軸重、軸型、速度、重量等數據。
2)車尾通過收尾感應線圈時,系統將采集的車輛信息和數據進行分析和比對,得出稱重結果,同時判斷車輛是否超載。
3)如果當前車輛超載,系統將超載信息發送給系統服務器,系統啟動超載車輛誘導系統,引導車輛進入復檢區進行復檢稱重;如果車牌識別器無法識別車輛信息,如:車牌遮擋、污損,車牌識別器也將該信息傳送給服務器,中心控制器啟動前方路側攝像機對車輛拍照,并將結果提交治超站控制中心,工作人員依據路側攝像機傳回圖像對可疑車輛進行攔截。
4)車輛進入復檢區,靜態稱重系統對車輛進行精確稱重。若車輛確定為超載,系統通知工作人員對超載車輛進行處理,并引導車輛進入超載貨物中轉區或接受其他處理措施;若車輛未超載,系統放行。
5)針對超載車輛逃逸未進入復檢區,系統將該車輛信息列入黑名單,并將該車輛信息發送至上游治超點、收費站和監控中心。
系統工作原理如圖1所示。
2.2 系統結構
系統組成主要包括:感應線圈、稱重傳感器、車牌識別器、誘導系統、信息傳輸設備和計算機系統。感應線圈檢測車輛到達;稱重傳感器對車輛動態稱重;車牌識別器采集車輛信息;誘導系統引導疑似超載車輛進入復檢區,信息傳輸設備對逃逸車輛信息進行傳輸;中心計算機對采集數據進行處理。

2.3 車輛超載閾值設定
本系統的關鍵是動態測重和超載判別,而超載閾值是影響系統性能的重點,如果閾值設定過高則導致可能超載車輛未識別,設定過低則增加誤判率而增大復檢工作量。設定閾值的方法主要包括:
1)如果系統處于理想環境,考慮檢測器精度,確定系統誤差值;
2)如果系統處于非理想環境,考慮人為因素和外界條件影響,確定浮動誤差值;
3)結合系統誤差和浮動誤差,確定最終超載閾值。
在本研究中,考慮了人為影響、外界環境,假設本系統在不大于80 km/h的綜合誤差在6%以內,超載系統的閾值設定為當前檢測車輛的核定軸載噸位×1.06。當然,超載閾值并非固定,要根據系統所處的外部環境,調整超載閾值,以確保系統檢測的準確性。
3 結語
針對高速公路超載問題特征,設計了“動態預檢+靜態復檢”的超載治理系統,針對各用戶(治超站、收費部門、監控中心、交警和駕駛員等)進行了用戶需求分析,擬定了系統功能,并對系統原理和結構進行了設計,針對系統的關鍵參數超載閾值進行了研究。動態稱重系統不僅能最大可能檢測到超載車輛,而且能避免因每車必查而導致的交通擁堵現象,也減少執法人員勞動強度和危險性。高速公路超載治理應該是多部門合作完成,需要針對超載問題制定相應的機制,保障治理效果。
[1]路成章,王文龍.超載運輸對社會的危害[J].公路交通科技,2004(5):49-50.
[2]Bernard Jacob,Eugene J.O’Brien,W.Newton.Assessment of the accuracy and classification of weigh-in-motion systems.Part 2:European specification[J].International Journal of Heavy Vehicle Systems,2000,7(2):153-168.
[3]Bob Peters,Chris Koniditsiotis.WEIGH-IN-MOTION TECHNOLOGY[M].Austroads Incorporated,Sydney NSW Australia,2000.
[4]Patrick J.Szary,Ali Maher.Implementation of Weigh-In-Motion(WIM)Systems[R].Center for Advanced Infrastructure &Transportation(CAIT),Rutgers,The State University,FHWANJ-2009-001,2009.
[5]Rob Bushman,Andrew J.Pratt.Weigh In Motion Technology-E-conomics and Performance[C].NATMEC’98,Charlotte,North Carolina,1998.
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中華手工(2017年2期)2017-06-06 23:00:31
中國交通信息化(2016年9期)2016-06-06 07:42:10
海峽科技與產業(2016年3期)2016-05-17 04:32:12
中外會展(2014年4期)2014-11-27 07:46:46
小說月刊(2014年4期)2014-04-23 08:52:20
河南科技(2014年18期)2014-02-27 14:15:06
祝您健康(1987年3期)1987-12-30 09:52:32
