
船載測控設備測角精度標定方法
2012-08-21 01:32:56王益忠葉玲玲
艦船科學技術 2012年11期
王益忠,葉玲玲
(中國衛星海上測控部,江蘇 江陰 214431)
0 引言
測控設備測角精度標定技術一直是航天測量船重點研究方向之一。目前,航天測量船測控設備進行測角精度標定主要采用塢內標校、海上校飛、碼頭有塔標校、海上施放信標球驗證等一系列程序來完成。縱觀整個測控設備標校過程可以發現:海上測角精度標定是影響整個測控系統測量精度的關鍵環節。目前測量船主要采取海上施放信標球來進行測控設備的任務前角度標定,其過程一方面依賴于測控光學設備測量精度和海上氣象條件限制,多次任務測試表明應用施放信標球標定光電偏差結果隨機誤差較大;另一方面該方法并不包含船姿船位測量誤差引起的測控設備測角誤差。因此,研究測控設備新的海上測角精度標定方法非常必要。
1 船載GPS探空標校系統
1.1 船載GPS探空系統
氣象探測設備是測量船重要設備之一,其測量的高空氣象數據是電磁波折射修正、電波傳輸時延修正以及低仰角大氣折射修正的重要參數。目前,測量船裝備使用了GPS高空探測系統[1]。該系統由氣球攜帶的GPS數字探空儀和船載接收處理設備2部分組成,利用GPS衛星信號實時測定探空氣球自由上升過程的飛行軌跡,由此計算出氣球飛行過程的速度矢量,從而得到任意高度的風矢量。此外,在探空儀中配置了各類溫、濕、壓傳感器,可以測出不同高度的溫度、壓力、相對濕度等氣象參數。設備組成如圖1所示[1]。
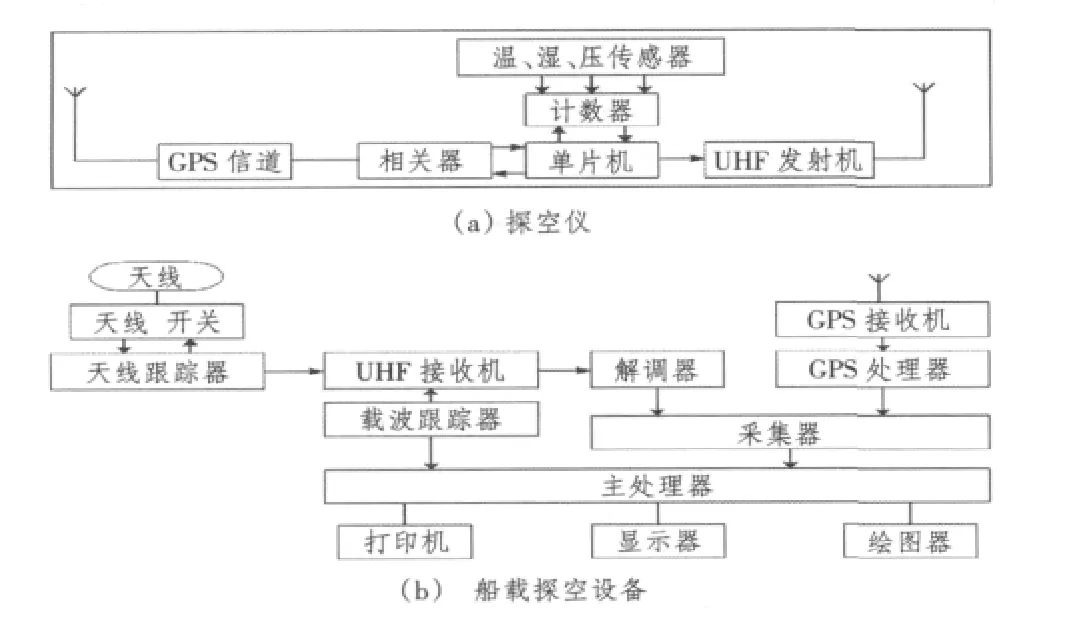
圖1 GPS高空氣象探測設備組成Fig.1 GPS sounding equipment composition
探空儀中的溫、濕、壓傳感器測量得到的溫度、壓力、相對濕度等信息經處理成數字數據與氣球攜帶的GPS接收機得到的數據一起經單片機合成編碼后通過UHF發射機送回地面。船上GPS接收機接收GPS衛星的導航信息 (星歷、歷書等),該信息與UHF接收的數據一起送入主處理機進行氣球位置及其飛行軌跡的解算,得到不同高度的溫、濕、壓和風速等數據。
1.2 船載GPS探空標校系統
1.2.1 標校原理
船載GPS探空標校系統采用“硬比較法”進行船載測控設備標校。所謂“硬比較法”就是選用精度高的測量設備作為標準設備,被鑒定設備與標準設備同時測量相同目標,然后按被鑒定設備的被鑒定元素比較二者的測量結果,通過統計方法計算被鑒定設備的系統誤差和隨機誤差。船載測控設備GPS探空標校系統基本原理如下:
1)利用GPS高空探測設備跟蹤探空氣球獲取氣球的高精度定位,實時錄取標校點 (氣球)的經緯度、高程數據,形成標校點GPS高空位置數據文件A,記錄格式為 (時間、經度、緯度、高度);
2)通過測量船船姿船位系統實時記錄測控天線的大地坐標文件B,記錄格式為 (時間、經度、緯度、高度);
3)船載測控設備跟蹤信標球,實時錄取測量數據文件C,記錄格式為 (北京時間、距離、方位角、俯仰角);
針對數據文件A和B,通過坐標變換、靜態解算、時空統一,求出測量船測控天線與標校點之間的相對空間數據文件D(北京時間、距離、方位角、俯仰角)。對文件C和文件D的距離、角度數據進行統計處理,即可獲得船載測控系統誤差。假設基于GPS定位數據文件A和B數據精確可靠,則該系統完全可以作為船載測控設備測角精度標定依據。
1.2.2 系統組成
船載GPS探空標校系統在保持原有各系統的基礎上只需將船載測控設備信標球置于GPS探空儀氣球上即可。船載GPS探空系統跟蹤探空儀上的UHF天線,接收解算探空儀GPS位置數據;船載測控天線跟蹤信標球,記錄天線角度距離數據;船姿船位系統實時解算記錄測控天線的大地坐標文件;船載GPS探空標校系統組成原理如圖2所示。
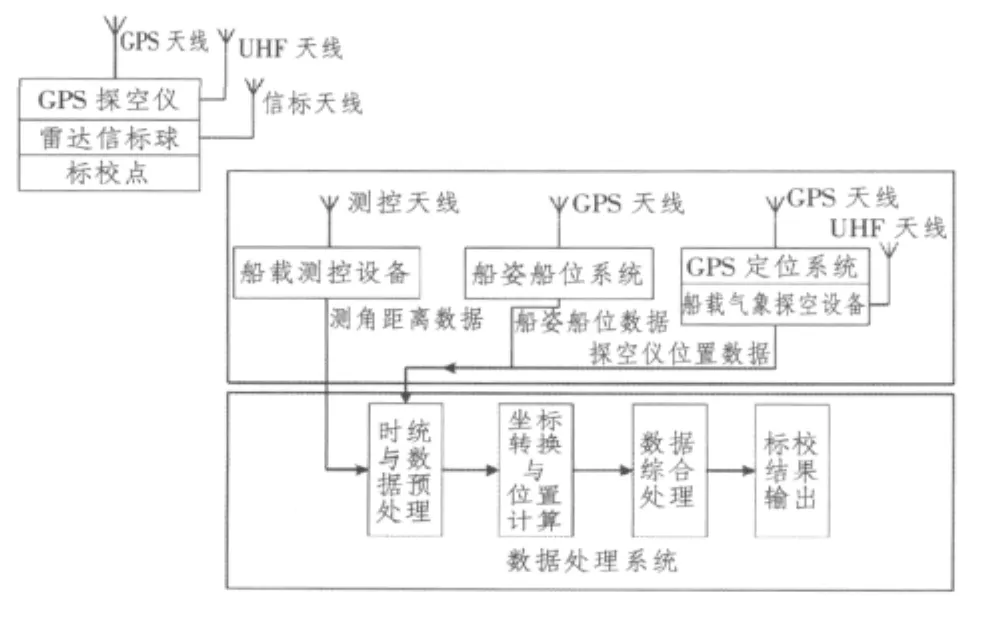
圖2 船載GPS探空標校系統組成原理Fig.2 Shipboard GPS sounding calibration system composition principle
1.2.3 數據處理流程
船載GPS探空標校系統數據處理流程見圖3。
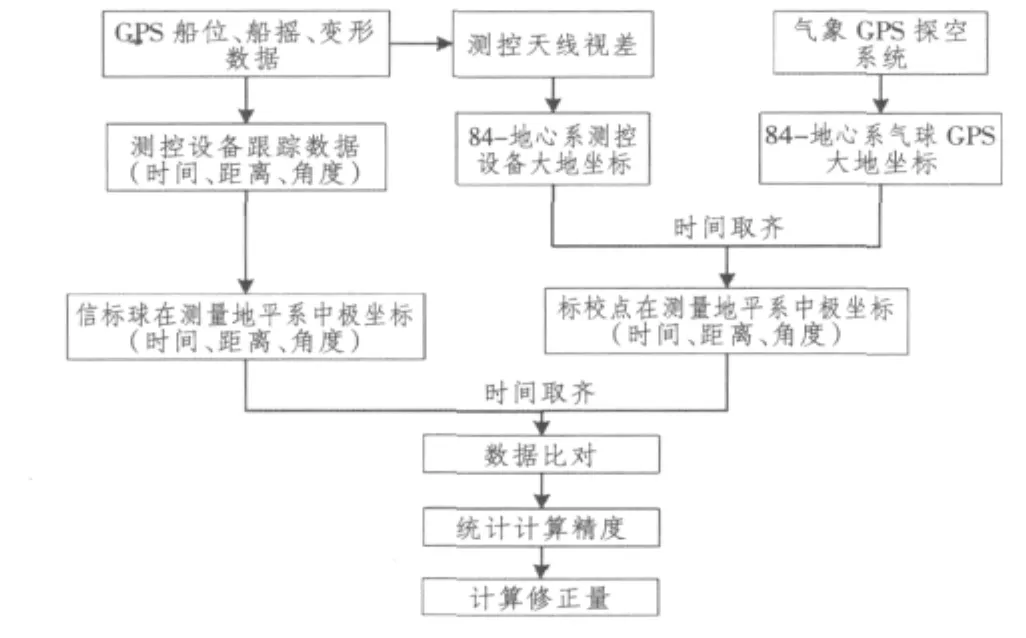
圖3 船載GPS探空標校系統數據處理流程Fig.3 Shipboard GPS sounding calibration system data processing flow chart
2 數學模型及精度分析
2.1 船載測控設備與標校點的位置數據計算
2.1.1 大地坐標系轉換到地心坐標系
船載測控設備和標校點測量[2]得到的大地坐標(λ,L,H)數據需換算成地心坐標系的直角坐標(Xe,Ye,Ze)進行。地心坐標系的原點在地心,Xe和Ye軸互相垂直并固定在赤道平面上,Ze軸與地球自轉軸重合,由地心向外指向格林威治子午圈與赤道的交點,各坐標軸與地球固定連接。轉換公式為
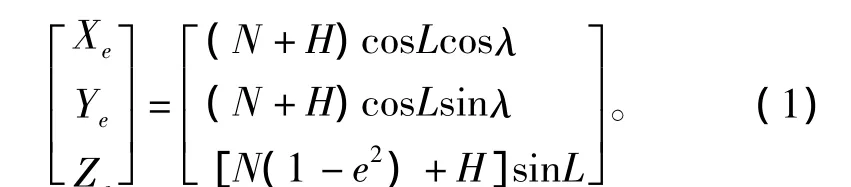
式中:H為高程數據;N=a/(1-e2sinL)1/2;a為地球的長半軸;e2為第一偏心率的平方;GPS系統采用WGS-84坐標系,其中:a=6378.137,e2=0.00669437999013。
2.1.2 地心坐標系轉換到地平坐標系
地平坐標系的原點在測量設備三軸中心,X軸為正東方向,Y軸為正北方向,Z軸垂直于XOY平面。標校點在測量地平坐標系中的位置(X,Y,Z)為

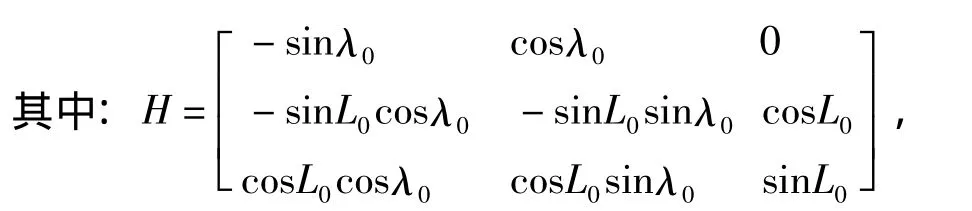
(λ0,L0)為測量設備三軸中心的大地經緯度。
2.1.3 測量地平系中標校點的極坐標計算
利用下列公式計算標校點位置在船載測控天線測量地平坐標系中的極坐標位置數據(D,A,E)。
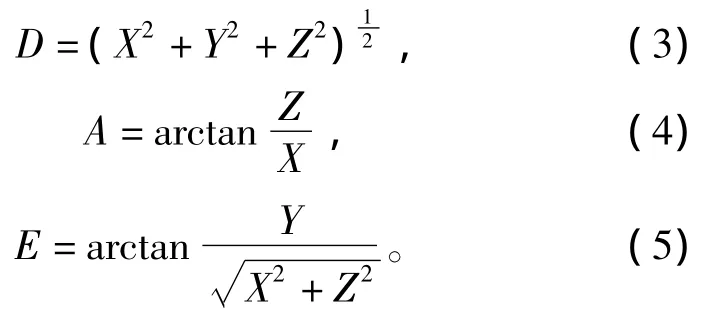
式中:D為距離;A為方位角;E為俯仰角。
2.2 標校數據統計處理
設{Dgi},{Agi},{Egi}分別為第 i(i=1,2,…,N)時刻利用GPS探空系統與船位系統測量數據計算得到的角度值和距離值;{Dri},{Ari},{Eri}分別為第i(i=1,2,…,N)時刻船載測控設備測量得到的角度值和距離值。對遠距離測量數據可以根據需要進行分段計算,每段數據的樣本數量N設為300~500,數據比較誤差的數理統計方法如下:

2.3 精度分析
通過上述分析可以看出,影響該測角精度標定的主要因素如下:
1)測量船姿態誤差帶來的測量設備三軸中心換算誤差;
2)GPS定位儀與信標球位置不一致誤差;
3)GPS探空儀和船載衛導接收機定位誤差。
上述3種誤差中,測量船姿態測量設備使用了慣導系統,精度很高,因素1)影響很小,可以忽略;其次信標球和探空儀位置誤差很小,因素2)也可以忽略。根據GPS探空系統的初步設計指標,GPS定位精度為水平誤差小于3 m,垂直誤差小于6 m。針對20 km高空目標,斜距達60~80 km,該角度誤差為十幾秒級,滿足σ標準/σ被鑒>3~10,滿足測量船測控設備海上標校要求。
3 結語
本文提出利用船載GPS探空儀搭建船載測控設備GPS探空標校系統,為船載測控設備海上測角精度標定提供了一種新方法。測量船海上測角精度標定技術一直是測量船關鍵技術之一,該系統的研究應用必將為測量船提高測控精度發揮巨大作用。隨著我國二代導航系統建設加快,利用二代導航定位系統代替GPS定位系統將逐步成為可能,標校精度將會得到進一步提高;同時該技術在陸基測控系統同樣適用,且借助GPS差分系統標校精度更高。
[1]江文達.航天測量船[M].北京:國防工業出版社,2002.298-300.
[2]鐘德安.航天測量船測控通信設備標校與校飛技術[M].北京:國防工業出版社,2002.205 -208.
[3]劉高峰,劉建.基于GPS定位系統的艦船雷達標定系統研究[J].艦船科學技術,2006,28(6):100 -102.LIU Gao-feng,LIU Jian.Research on shipborne radar calibration system based on GPS positioning system[J].Ship Science and Technology,2006,28(6):100 -102.
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:26:08
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
工業設計(2016年12期)2016-04-16 02:52:00
