基于GPS/DR組合的移動測量系統定位
2012-08-22 08:02:04孫冬凱
科技視界 2012年35期
孫冬凱
(上海同濟大學測繪與地理信息學院 中國 上海 200092)
0 前言
移動測量系統是一種多傳感器集成的數字成圖系統,對于多傳感器集成空間數據采集系統而言最重要的是直接地理坐標參考,確定測量傳感器的坐標,使得移動測量系統成為一種獨立的測成圖系統[1]。全球定位系統(Global Positioning System,GPS)可以進行全球、全天候和實時導航,定位精度相關性小,但是接收機需要觀察4顆以上衛星才能進行定位,在高速運動的情況下,或者城市中受到高大建筑物、隧道等的遮擋時,會造成失鎖。航位推算(Dead-Reckoning,DR)通過一個方向傳感器和一個速度傳感器推算車輛的瞬時位移增量,在用戶初始位置已知的情況下求解出位置信息。能夠不依靠外界信息獨立自主地導航定位,但由于方向傳感器的誤差隨著時間的延長而積累,所以DR不能單獨、長時間的提供定位服務[2]。GPS和DR導航系統各有優缺點,通過卡爾曼濾波的方法建立模型將兩者組合起來,可以彌補兩者單獨定位的許多不足。GPS/DR組合系統可以得到平滑、高采樣率的定位結果,用DR的短時間定位結果輔助GPS結算,避免失鎖等因素對導航帶來的影響,而GPS可以輔助DR的定位結算,避免由于時間帶來的DR累積誤差,從而提高導航定位的精度。
1 GPS/DR組合Kalman濾波模型的建立
Kalman濾波方法是一種對動態系統進行實時數據處理的有效方法,其通過一系列的觀測量,采用相應的濾波算法估計出所需的觀測值。本文采用的GPS/DR組合模型為擴展Kalman濾波模型,主要包括狀態方程和GPS/DR觀測方程。GPS/DR觀測方程中的觀測值包括GPS定位位置解,DR觀測的角速度與距離。
1.1 GPS/DR組合系統狀態方程的建立
建立狀態方程的一個難點是如何描述車輛加速度變化。采用機動載體的“當前”統計模型來描述車輛加速度的統計分布。這種模型的意義在于,當目標現正以某一加速度運動時,它在下一瞬時的加速度取值范圍是有限的,而且只能在“當前”加速度的領域內[3]。
取組合定位系統的狀態向量為 X=[xe,ve,ae,xn,vn,an]T,其中 xe、xn分別為車輛東向和北向的位置分量;ve、vn分別為車輛東向和北向的速度分量;ae、an分別為車輛東向和北向的加速度分量。設采樣周期為T,得到系統離散的狀態方程為:

式中 Xk是系統的 n維狀態向量,Φk,k-1是系統的 n×n維狀態轉移矩陣,Γk,k-1是 n×p 維干擾輸入矩陣,Wk是系統的 p 維隨機干擾向量。
1.2 GPS/DR組合系統觀測方程的建立
將GPS輸出的東向位置信息eobs、北向位置信息nobs、DR輸出的角速度w以及里程計在一個采樣周期內輸出的距離s作為觀測量,得到系統離散的觀測方程為

式中,Zk=[eobs(k) nobs(k) wksk]T
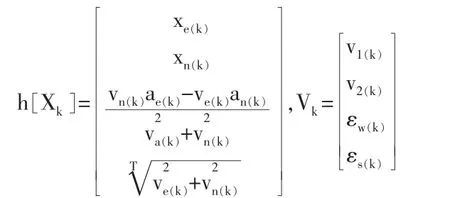
其中v1、v2分別是GPS接收機輸出的東向位置和北向位置的觀測噪聲,可近似為的高斯白噪聲;εw為陀螺的漂移,近似為的高斯白噪聲;εs為里程表的觀測噪聲,近似為(0,σ2s)的高斯白噪聲。
1.3 GPS/DR組合系統Kalman濾波解算
GPS/DR組合系統噪聲滿足Wk和Vk相互獨立,系統過程噪聲方差陣非負定,系統觀測噪聲方差陣正定,則根據擴展Kalman濾波遞推方程和所建立的GPS/DR組合定位系統的狀態方程(式(1))和觀測方程(式(2)),可以得到系統的遞推濾波方程如下[3~6]:

狀態一步預測:一步預測誤差方差陣:濾波增益矩陣:


狀態估計:

估計誤差方差陣:

只要給出初值X0和P0,依據k時刻的觀測值Zk,就可以依據式(3)~式(7)遞推計算得 k 時刻的狀態估計 Xk(k=1,2,…)。
2 實驗分析
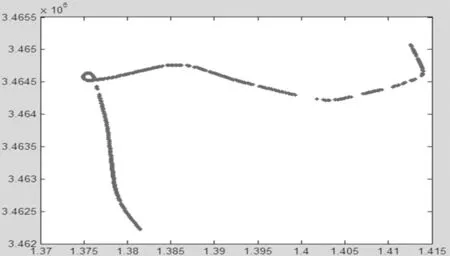
圖1 GPS單獨定位軌跡圖
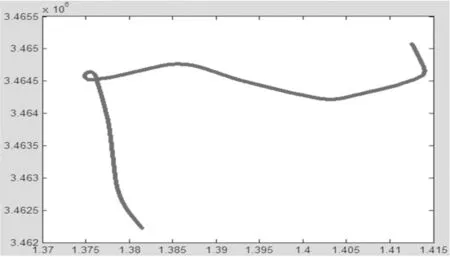
圖2 GPS/DR組合卡爾曼濾波定位軌跡圖
本次車載導航試驗使用的是同濟大學的LD2000型移動測量系統采集的上海高架路實測數據。由于GPS和DR系統的時間系統不同,在進行組合導航定位時,需先進行時間同步,將GPS和DR的時間基準統一為采用GPS接收機的時間。GPS/DR數據進行組合濾波前,先將GPS接收機采集的數據與GPS基站采集的數據進行差分,得到GPS輸出的WGS-84大地坐標,通過高斯投影正算轉換到當地水平坐標系下,即東向、北向坐標。
現已知移動測量系統從坐標點(141252.583,3465078.865)出發,做初速度為零的變加速運動。可取濾波系統的相關參數為:初始狀態向量X0=[141252.583,0,0,3465078.865,0,0]T,初始預測噪聲協方差陣P0=diag[10,1,0.02,10,1,0.02],選取的各方差值為GPS/DR組合數據經過卡爾曼濾波前后的軌跡對比如圖1、2所示。
圖1為GPS數據得到的定位軌跡,由于橋面遮擋等原因,GPS信號會出現短暫的失鎖,導致GPS不能正常工作,造成定位信息的缺失。GPS/DR的組合系統在GPS失鎖時,可以通過DR系統進行車輛的航位推算,補充GPS不能正常工作時的定位信息,并且不會出現誤差的累積。通過兩者的信息的融合,穩定有效的給出了移動測量系統整個數據采集過程的運動軌跡。通過比較,GPS/DR組合定位有效提高了單一系統動態定位的可靠性。
3 總結
本文提出了基于GPS/DR觀測數據的組合定位的Kalman濾波模型,并用改模型對實測數據進行計算。通過與原GPS觀測數據的定位結果對比表明,應用Kalman濾波模型處理GPS/DR數據進行定位,能夠有效的解決因衛星失鎖導致的GPS定位失效以及DR單獨定位誤差累積的問題,提高定位系統的可靠性和準確性,為移動測量系統提供更好的定位服務支持。
[1]于興旺,張小紅,劉經南,等.GPS/DR原始觀測值組合導航定位研究[J].武漢大學學報:信息科學版,2009,02.
[2]楊曉云,何恒,施滸立.車輛GPS/DR組合導航系統研究[J].測繪通報,2007(9).
[3]付夢印,鄧志紅,張繼偉.Kalman濾波理論及其在導航系統中的應用[M].北京:科學出版社,2003.
[4]汪志明,花向紅,陳遠,等.GPS/DR組合Kalman濾波模型及性能分析[J].武漢大學學報:信息科學版,2009,09.
[5]楊元喜.自適應動態導航定位[M].北京:測繪出版社,2006.
[6]劉友文.基于聯邦式Kalman濾波的 GPS/DR組合定位技術[J].機電技術,2010(5).
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
家庭影院技術(2017年9期)2017-09-26 03:41:45