超高壓多分裂輸電線路巡檢機器人研制與開發(fā)
2012-08-22 07:34:08曹雷,郭銳,張峰
制造業(yè)自動化 2012年23期
關鍵詞:檢測
曹 雷,郭 銳,張 峰
(1.山東電力集團公司 電力科學研究院,濟南 250002;2.國家電網 電力機器人實驗室,濟南 250001)
0 引言
超高壓輸電線路是高壓電網的重要組成部分,為保證其在運行過程中的安全性和穩(wěn)定性,需要定期開展巡檢工作;由于輸電線路分布點多,遠離城鎮(zhèn),地形復雜,并且導線暴漏在野外,長期風吹雨淋,且受到持續(xù)的機械張力、電氣閃烙和材料老化的影響,容易引起磨損、斷股、腐蝕等損傷,若不及時修復更換,易引起嚴重的事故,造成大面積停電及經濟財產損失。所以,必須對輸電線路進行定期的巡視檢查,隨時掌握和了解輸電線路的安全運行情況,以便及時發(fā)現和消除隱患,預防事故的發(fā)生;目前,傳統(tǒng)的巡檢方法普遍采用人工巡檢,由于輸電線路大部分都分布在野外,穿越高山、河流、高速公路和鐵路等,人工巡檢檢效率低下、勞動強度大、危險系數高,其準確性也難以保證,檢測精度低和可靠性差。利用機器人帶電巡檢和維護超高壓輸電網絡,不但可以減輕工人千里巡線和帶電作業(yè)的勞動強度,而且可提高檢測精度和檢測效率,取代人直接工作在高危險的場合,同時大大減少人力資源,對提高電網自動化作業(yè)水平、保障電網安全運行具有重要意義。在機器人研究領域中,電力機器人屬于典型的特種機器人,其研究應用范圍越來越廣,在國際上形成了獨特的電力機器人應用研究領域,特別是機器人技術在輸電線路檢測等方面的應用研究更是電力機器人研究領域中的熱點。
本文介紹了作者及其所在團隊研制的一種超高壓多分裂輸電線路巡檢機器人。該機器人能在電壓等級220KV以上的二分裂、三分裂、四分裂和六分裂導線上運行,對輸電線路進行自主檢測。機器人本體結構采用四輪臂,同時騎跨兩根導線的方案,遇到防震錘時無需做越障動作,可直接壓過,節(jié)省了越障巡線時間;在遇到間隔棒、懸垂線夾及懸垂絕緣子串時,采用每個輪臂依次越障,逐個跨越障礙物的方式。本機器人在國家電網機器人實驗室內模擬線路上完成了各種越障實驗。
1 機器人本體
1.1 方案要求
分裂導線與單股導線或者OPGW相比,運行環(huán)境更加復雜,導線上的障礙物更多,如間隔棒、懸垂線夾、防震錘和懸垂絕緣子串等,如圖1(a)~圖1(d)所示。特別是,由于輸電線路的大跨越、導線弧垂等引起的分裂導線間距變化較大,給輸電線路巡檢機器人本體結構設計帶來諸多困難。
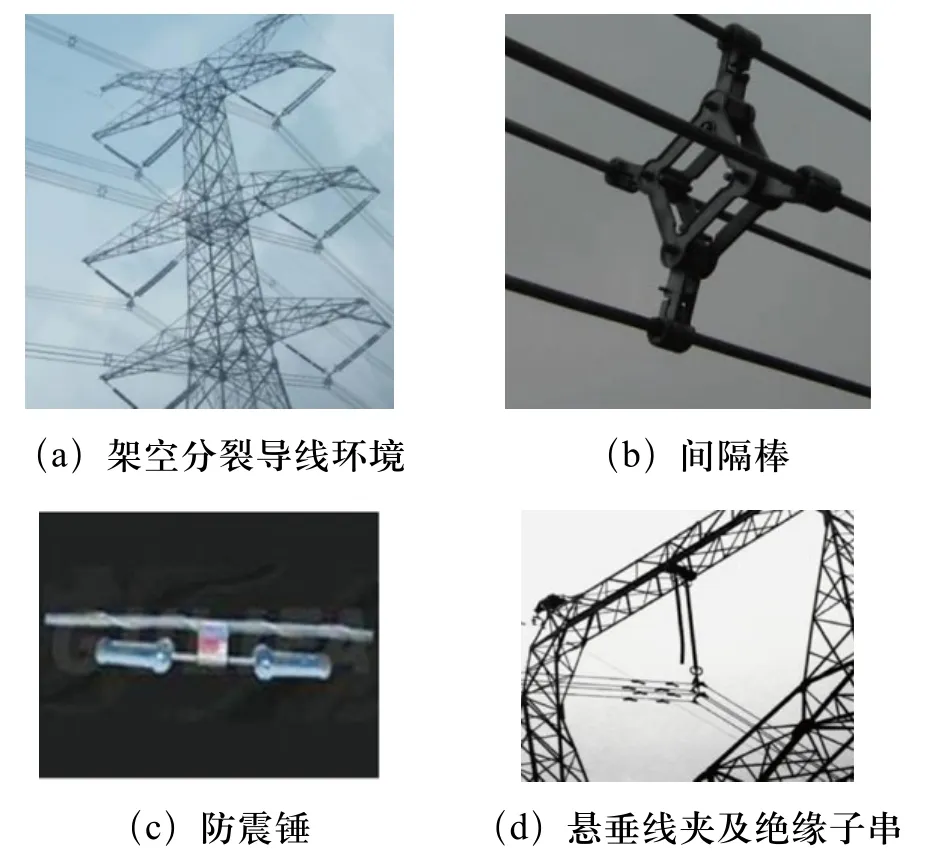
圖1 分裂導線線路環(huán)境
輸電線路巡檢機器人是一個復雜的機電一體化系統(tǒng),涉及機械設計、通信傳輸、遠程控制和多傳感器融合等多領域。但機械結構是機器人的基礎,也是目前制約機器人實用化的最大障礙。多分裂巡檢機器人對機械結構的要求有:1)能夠自主或者人工遙控順利繞過、避讓線路上的各種障礙物;2)各個輪臂關機具有較強的調節(jié)能力,特別是在跨越懸垂絕緣子串時,絕緣子串兩側導線懸垂角度較大;3)具有較強的爬坡能力,最少能爬越30°的斜坡;4)具有自我保護功能,防止在高空作業(yè)發(fā)生風舞跌落;5)可搭載可見光和紅外能檢測設備,最好能在平臺上集成作業(yè)機械臂對導線進行修補、清除異物等作業(yè)。
1.2 巡檢機器人方案
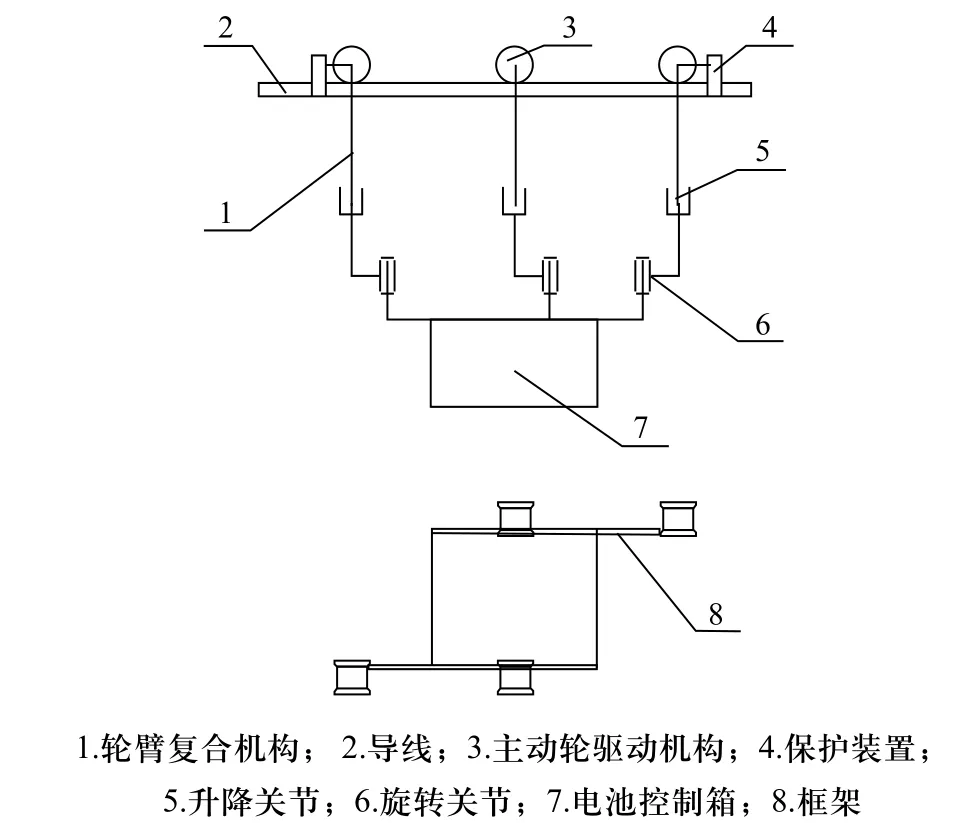
圖2 巡檢機器人結構原理圖
如圖2所示,采用輪臂復合機構的巡檢機器人,具有4個交錯分布的輪臂,每個輪臂具有3個自由度,機器人前后各設置保護裝置,防止線路跌落。其中,如圖3所示,每個輪臂包含主動輪驅動機構、升降關節(jié)和旋轉關節(jié)。
機器人采用前后交錯分布的4個輪臂,在越障和作業(yè)過程中,任意抬起某個臂,或者直接驅動輪壓過防震錘時,機器人本體也不會發(fā)生傾覆,保證了其安全性;輪臂的長度和自由度數對機器人重量、體積影響較大,多分裂導線間距比較大,4個輪臂都騎跨在最下方兩根導線上,有效減小了輪臂的長度,增加其穩(wěn)定性;每個輪臂除了驅動輪之外都包含上下移動和左右旋轉2個自由度,用最少的自由度完成越障動作。每個輪臂機構都為驅動輪,為機器人提供足夠的爬坡能力,同時也防止前或者后輪阻力過大,造成整個機器人本體位姿發(fā)生傾斜。
1.3 巡檢機器人總體結構
根據分裂導線和障礙物的特點以及對機器人方案的分析,通過對原型樣機的反復試驗改進,最終設計出適用于超高壓分裂導線的巡檢機器人,其總體結構如圖3所示。
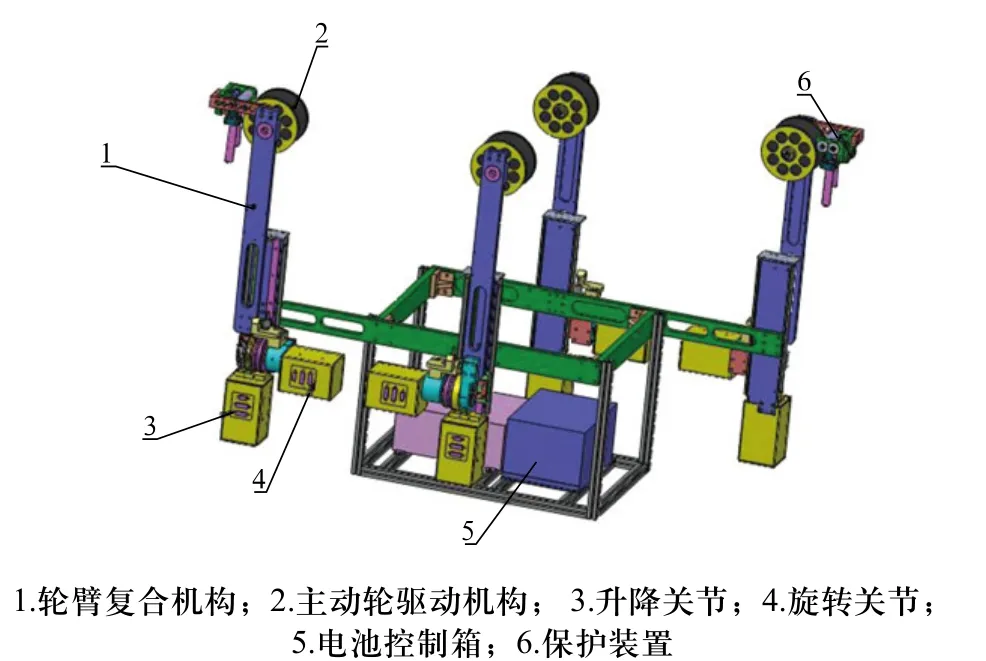
圖3 巡檢機器人總體結構
2 巡檢機器人工作過程
巡檢機器人完成一次巡檢任務的具體工作過程如圖4所示。
首先在地面對機器人整體上電,機器人完成自檢后將機器人吊裝到分裂導線下方兩根導線上(上線時機器人處于帶電狀態(tài));然后地面監(jiān)控計算機發(fā)出控制命令,機器人本體接收到運行命令開始自主巡線,驅動;行走過程中,可見光和紅外監(jiān)控設備對線路進行拍攝,將圖像通過無線設備實時傳輸到地面工作基站,地面工作基站對線路的情況進行判斷并記錄故障情況,決定是否對線路實施維護;同時激光傳感器等不斷檢測前方障礙物的情況。當機器人檢測到前方有防振錘時,機器人無需做任何調整,直接壓過。當檢測到懸垂線夾和間隔棒時,機器人停止行走,進行調整,調整步驟如下。
1)前端保護裝置打開,前臂上舉直至驅動輪脫線,然后旋轉關節(jié)動作,帶動前輪擺開;
2)剩余線上三個驅動輪前進,當前臂越過障礙物時機器人停止前進,然后前臂做與1)相反動作,前臂驅動輪復位并且前端保護裝置閉合;
3)前輪復位后中間兩個臂同時抬起并擺開,剩余線上兩個驅動輪前進,帶動中間兩臂越過障礙物后停止,然后兩臂復位;
4)后端保護裝置打開,后臂做與1)相同的動作,越過障礙物。
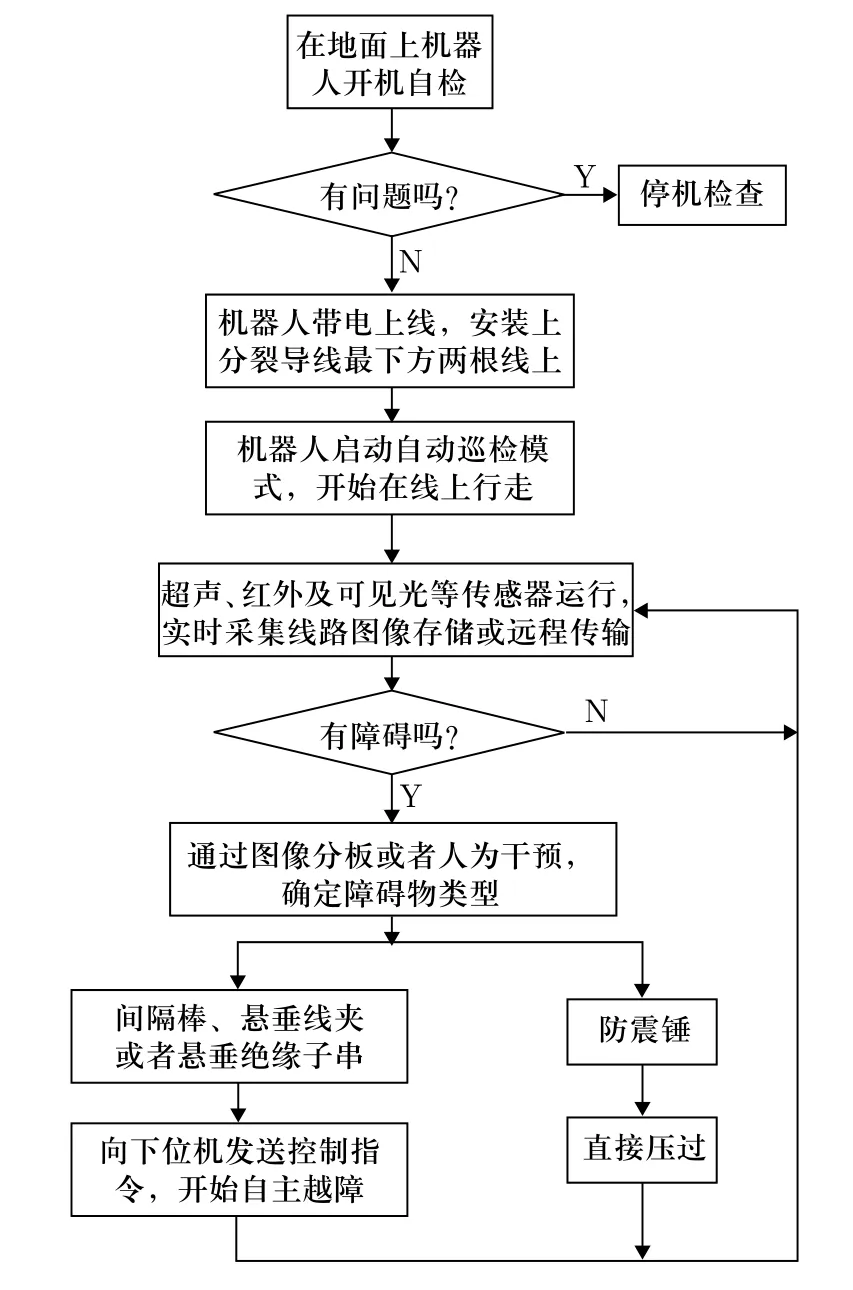
圖4 巡檢機器人工作流程圖
3 自主越障實驗
實驗室搭建的500KV四分裂導線模擬實驗環(huán)境,線上具有防震錘、懸垂線夾和懸垂絕緣子串等典型障礙物。如圖5所示為巡檢機器人在實驗線路上自主越障的情形,以間隔棒為例。

圖5 巡檢機器人在實驗線路上自主越障
實驗表明,機器人:1)能自主越障和巡檢。可直接壓過防震錘,自主避讓間隔棒、線夾和絕緣子串等障礙物;2)能在多分裂導線上運行。具有騎跨兩根導線運行的能力,前后交錯分布的四個輪臂分跨兩根導線,運行更穩(wěn)定; 3)安全可靠性高。分跨導線的特點保證了機器人在越障時至少有兩個驅動輪騎跨在兩個導線上,并且機器人前后個設計有保護裝置。
4 結論
本文研制的高壓輸電線路巡檢機器人采用前后交錯分布的4個輪臂結構,能夠有效避讓間隔棒、絕緣子等常規(guī)線路障礙物,具有自我保護能力,安全可靠性更高;同時在實驗室多次進行越障實驗,驗證了機構設計的合理性和可行性;該機器人左右兩個輪臂分跨兩個分裂導線,姿態(tài)穩(wěn)定性更好,跨越障礙能力更強。由于巡檢機器人上一個復雜的系統(tǒng),其一直處于高電壓、強電磁場、障礙物多以及野外強風造成的風舞等環(huán)境中,要達到實用化、可靠性高還需進步一研究,主要包括:1)對機器人機械結構進一步優(yōu)化,減輕其重量和體積,更便于其上線;2)解決機器人能源問題,可在線更換電池或者進行在線取電;3)提高機器人的自主越障能力,基于電磁場檢測、多傳感器與視覺伺服、線路結構參數數據庫與GPS的環(huán)境信息融合、分層決策與規(guī)劃的自動導航系統(tǒng)以提高機器人的智能化水平,進一步增加系統(tǒng)運行的穩(wěn)定性、可靠性與靈活性。
[1] 周風余, 吳愛國, 李貽斌, 等. 高壓架空輸電線路自動巡檢機器人的研制[J]. 電力系統(tǒng)自動化, 2004(23), 89-91.
[2] 吳功平, 肖曉暉, 郭應龍, 等. 架空高壓輸電線自動爬行機器人的研制[J]. 中國機械工程, 2006(3): 237-240.
[3] Sawada J, Kusumoto K, Munakata T. A Mobile Robot for Inspection of Power Transmission Lines[J]. IEEE Trans on Power Delivery, 1991, 6(1): 309 -315.
[4] J. P. Bellerive, “Performance of porcelain insulators: forty years of experience at Hydro-Quebec,” Canadian Electrical Association,Transmission Section, Spring Meeting,Montreal, Canada, 1990.
[5] L. Tang, L. J. Fang, H. G. Wang. Development of an inspection robot control system for 500kV extra2high voltage power transmission lines[J]. The Society of Instrument and Control Engineers Annual Conference.Tokyo, Japan: SICE, 2004. 329-334.
[6] 陳中偉, 肖華, 吳功平. 高壓巡檢機器人電磁傳感器導航方法[J]. 傳感器與微系統(tǒng), 2006, 25(9): 33-39.
[7] 龔振邦, 汪勤愨, 陳振華, 等. 機器人機械設計[M]. 北京:電子工業(yè)出版社, 1995.
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48
