助航燈具光強測試系統研究
2012-08-27 13:13:22侯啟真徐春紅
電光與控制 2012年2期
關鍵詞:系統
侯啟真, 徐春紅
(中國民航大學航空自動化學院,天津 300300)
0 引言
機場目視助航燈光的主要作用是為飛行員提供跑道方向、位置和距離信息,是保障飛機在夜間、低能見度或者其他惡劣氣象條件下,進行正常起飛、著陸、滑行的關鍵設施之一,在飛機安全起降過程中起著舉足輕重的作用。而燈具光強是保障其有效發揮作用的關鍵,準確測量燈具出射光強的空間分布是國內外各機場的普遍需求。目前,國內外很多學者致力于研究等值線在不用領域的應用,并提出了各種繪制等值線的方法[1-3]。本文基于助航燈具光源的特殊性,提出了一種基于線陣CCD的光強快速檢測系統,采用改進的Delaunay三角剖分線算法獲得等光強曲線,以準確地反映燈具光強的空間分布。通過對等光強曲線的分析,找出問題存在的原因,為系統維護提供科學依據與方法,同時也可依據判據給出燈具合格與否的結論。本文提出的這種檢測助航燈具光強空間分布的方法,可直接應用于機場助航燈具的維護,對其量化檢測分析有重要的意義。
1 檢測系統原理
1.1 系統結構
如圖1所示,該檢測系統由6部分構成:照度傳感器部分、信號預處理和采集部分、信號傳輸部分、數據處理部分、系統控制部分和照度傳感器驅動機構。

圖1 系統硬件框圖Fig.1 Block diagram of system hardware
系統利用經均化處理過的毛玻璃和透鏡組成光學系統,將橫向測量范圍內光束投射到CCD成像面上,使CCD同時實現一行光強數據的采集,通過步進電機驅動[4],可使 CCD 縱向以標準距離(每步移動0.02 mm,由選擇的步進電機參數和測量精度決定)移動,從而實現光強的二維測量。該系統選用的照度傳感器為線陣CCD ILX521A,CCD正常工作所需的驅動脈沖由STC89C52RC單片機產生,CCD最大飽和量輸出電壓值為3 V,而A/D芯片輸入信號的電壓范圍為0~10 V,為此系統首先利用三極管射級放大器對CCD輸出信號放大后,再經A/D芯片和USB接口芯片來實現數據的高速采集和數據的實時傳輸,最后利用Matlab軟件繪制出燈具的等光強曲線。
1.2 光強值的計算
系統光路如圖2所示(圖為正視圖,CCD水平放置,θ角度對應毛玻璃上光斑水平方向的光強,對應圖3中x坐標方向),為使CCD能夠完整地接收到燈具向外輻射的光線,首先將燈具的出射光投射到一片經過均化處理的毛玻璃上,形成光斑,然后再經過透鏡組和濾 光 片 將 該 光 斑 成 像 在 CCD 光 敏 面 上[5-8]。CCDILX521A的頻譜響應范圍為400~1000 nm,為模擬飛行員的可視光譜,系統選用了紫外/紅外截止濾光片(波長在 300~380 nm間的紫外線通過率 T<0.001%,波長在750~900 nm間的紅外線通過率T<2%,440~660 nm頻譜段可見光的透過率約為90%)對CCD響應頻譜進行校正,使其光譜響應曲線符合CIE視見函數曲線。
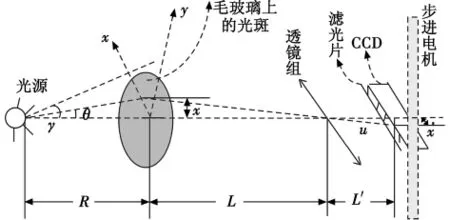
圖2 光源的光強與照度關系示意圖Fig.2 The relationship between light intensity and illumination
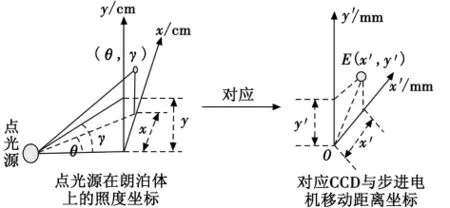
圖3 對應的空間坐標關系圖Fig.3 The corresponding space coordinate system
毛玻璃經過均勻處理可視為朗泊輻射體,燈具到光接收面的距離遠大于其出口尺寸可視為點光源[9],它在極坐標(θ,γ)方向的照度為[10]

設朗泊輻射體的透射率為ξ,散射系數為η,則其光出射度為

其表面發光亮度為

設系統的入射光瞳為μ,則其軸上像點的照度為

其中:δ為透鏡的透過率;β為透鏡的垂軸放大率。
以CCD光敏面長度方向作為水平坐標x′,步進電機移動方向為垂直坐標 y′,建立坐標系 x′oy′,見圖3。系統選用兩相混合式步進電機,步距角為1.8°,即電機運動200步為一周。
在(x′,y′)點,設 CCD 輸出電流信號 i(x′,y′),光敏面的照度 E(x′,y′),t代表兩次取樣的間隔時間,輸出電壓值 U(x′,y′),則在正常工作范圍內有

式中:K 為比例常數;Q=E(x′,y′)t為曝光量,單位為lx.s。線陣CCD電路的電阻值為常數Ri=350 Ω。則

根據系統光學系統設計,CCD表面加一濾光片,則透過CCD感光面照度與光源在濾光片處照度關系為

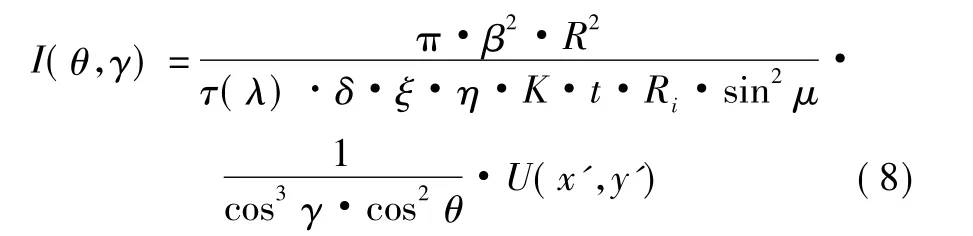
τ(λ)為濾光片光譜透過率。可得朗泊輻射體(θ,γ)方向光強值與測量值 U(x′,y′)的關系為
由圖2幾何關系可得
由式(9)、式(10)可得

則,

由圖3的幾何關系可得

則,
由式(8)、式(12)、式(14)得
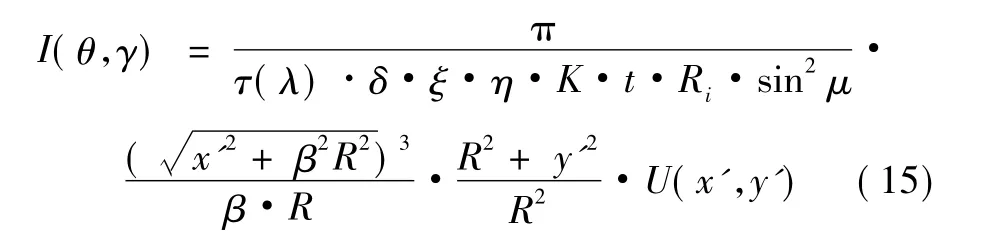
即為 CCD 輸出電壓值 U(x′,y′)與燈具在(θ,γ)點的出射光強值I(θ,γ)的關系式。
2 數據處理
繪制等值曲線的方法歸納起來有兩種,即三角網格法和矩形網格法。矩形網格法較易實現,具有普遍性,但擬合邊界能力差,等值線斷續,插值時原始數據失真等缺點;三角網格法能保證原始數據的精度,但程序結構較復雜。
考慮系統的精度和速度要求,本系統提出了在三角網格法基礎上改進的三角剖分線性插值法,是精確插值,較為忠實原始數據點。該方法的優點是不需要進行三角型棱邊的搜索及邊界邊的判斷。缺點是繪制的曲線不平滑。為此提出了在Delaunay三角剖分算法的基礎上,采用B樣條進行曲線平滑處理,改善了其因線性插值繪制的曲線不平滑的缺點。
2.1 等值線的繪制
基于Delaunay三角剖分算法是根據三角形各邊上是否有等值點,用內插值法求出等值點坐標,跟蹤、連接等值點,最后生成等值線。設三角形3個頂點為a、b、c。等值點的特征值為I,則插值公式為
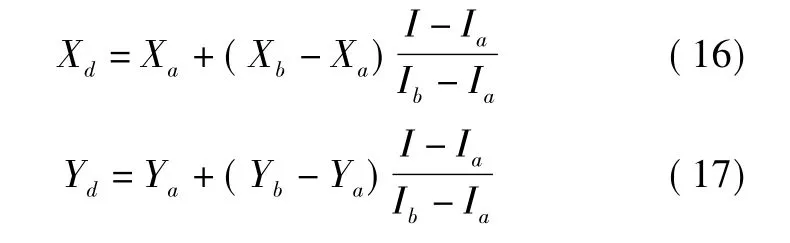
(Xd,Yd)即為所求等值點及其對應坐標[11]。
2.2 B樣條曲線平滑數學模型
B樣條曲線方法對折線的平滑處理,主要是對每相鄰的k+1點構造一個k次B樣條函數,稱為基函數,由這些函數進行局部逼近,得到若干條平滑的B樣條曲線,并且保證相鄰曲線段之間的連續性[12]。
本文采用二次B樣條曲線進行等值線平滑,這里僅給出k=2,即二次B樣條曲線的具體表達式為

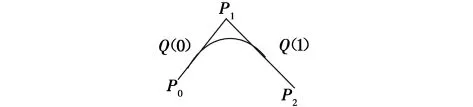
圖4 平滑后曲線Fig.4 Smoothed curve
假定某等值線在Delaunay三角網中的追蹤結果有n+1個等值點pi(i=0,1,…,n),則相鄰的每3個點可構造出一段二次B樣條曲線,平滑后新數據點的坐標公式為[13]

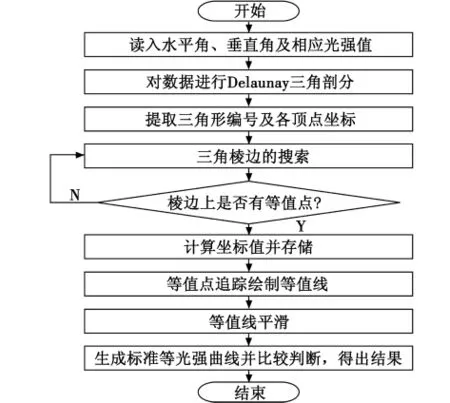
圖5 繪制等值線流程圖Fig.5 Flow chart for drawing intensity contour
系統程序分為系統初始化子程序、CCD驅動子程序、數據采集與傳輸子程序、步進電機控制子程序、數據處理子程序。初始化子程序檢查CCD是否處于坐標原點位置。CCD驅動子程序的任務是保證CCD正常工作。數據采集與傳輸子程序是保證數據實時地采集并傳送給上位機,進行下一步的處理。步進電機控制子程序的任務是確保整個采集模塊位置的精確定位。數據處理子程序通過讀取CCD輸出的電壓值計算對應的光強值,并繪制出等光強曲線圖,與標準的等光強曲線進行比對,給出合格與否的判斷。
3 測試結果分析
ICAO ANNEX14對一般燈具都規定了相應的中心光強、次光強、最弱光強范圍,以及中心光強的平均值,并列出了各類助航燈具的等光強曲線[14-15]。將測得的光強參數進行曲線擬合與標準曲線比對,可以判斷該燈具的出射光強分布是否合格(試驗以PAPI燈具為例,ICAO規定紅光(論文給出的數據均為紅光的光強值)的主光束最小光強為15000 cd,實測值為11655.9639 cd,結果判斷為不合格)。圖6為利用兩種不同算法繪制PAPI燈具的光強圖。從圖6可以看出,利用論文提出的算法繪制的等光強曲線明顯比一般的三角網格繪制的曲線要平滑,測量數據結果精度要高。圖7為系統測試界面。
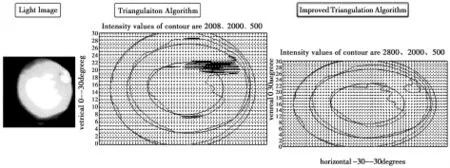
圖6 算法比較分析Fig.6 Comparison of two different algorithms
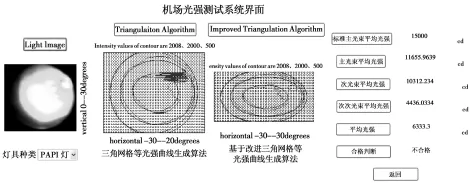
圖7 系統檢測界面Fig.7 System testing interface
4 結論
通過對助航燈具光源發光特性的分析,提出了一種光強檢測系統,利用改進的三角剖分算法繪制助航燈具的光強分布曲線,且進行了多次實測實驗,實驗證明該系統測量范圍為水平角-30°~30°,垂直角0°~30°,測量光強范圍40~20000 cd,測量結果以圖形方式顯示效果直觀,速度滿足燈具檢測需求。
[1] 湯泉,牛錚.構建Delaunay三角網的改進算法[J].計算機應用,2007,2(6):158-159.
[2] YEO M F.An interactive contour plotting program[J].Education & Training.Eng.Compute,1984,1(3):273-279.
[3] SUNDARAMOORTHI G,YEZZI A.Sobolev active contours[J].International Joural of Computer Vision,2007,73(3):345-366.
[4] 胡炳梁,杜云飛.雙步進電機控制系統在航空相機中的應用[J].微特電機,2006(7):30-31.
[5] 樊超,孫寧寧,梁義濤,等.基于時間調制的光學相關法測量亞像元像移研究[J].電光與控制,2010,17(1):73-76.
[6] 成先富,賈惠波,徐端頤.光盤光學系統標量衍射理論的有效性分析[J].清華大學學報:自然科學版,1999,39(8):53-55,59.
[7] 梁翠萍,李清安,喬彥峰,等.簡析光學系統自動調焦的方法[J].電光與控制,2006,13(6):93-96.
[8] 許兆林,趙育良,張國棟.新型航空相機自動調焦系統的設計[J].電光與控制,2011,18(4):77-80.
[9] 王曉鵬.空間光強自動測試裝置的研究[J].應用光學,2005(5):1-3.
[10] COATON J R,MARSDEN A M.Lamps and lighting[M].4th ed.338Euson Road,London,NW1 3BH Arnold and Contibutors,1997.
[11] 蔣瑜,杜斌,盧軍,等.基于Delaunay三角網的等值線繪制算法[J].計算機應用研究,2010,27(1):101-103.
[12] 孫桂茹,馬亮,路登平,等.等值線生成與圖形填充算法[J].天津大學學報,2000,33(6):816-818.
[13] 崔曉東,王莉萍,王國寧,等.基于VB的電視天氣預報等值線繪制分析軟件開發[J].氣象科技,2008,36(5):670-672.
[14] 楊元元.民用機場運行安全管理規定[M].[出版地不詳]:民航局,2007:19-21.
[15] 中國民用航空局機場司.民用機場助航燈光系統運行維護規范[Z].AP-191-WM-CA-200x-xx.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32