電機(jī)功率因數(shù)控制器的控制算法
2012-08-28 06:50:02張有東
電機(jī)與控制應(yīng)用 2012年7期
張有東
(華北科技學(xué)院機(jī)電工程學(xué)院,河北三河 065201)
0 引言
電機(jī)功率因數(shù)控制器是以雙向晶閘管為調(diào)壓元件,根據(jù)三相異步電機(jī)在不同負(fù)載時的功率因數(shù)變化,控制雙向晶閘管的控制角度,調(diào)節(jié)電機(jī)端電壓。負(fù)載大,功率因數(shù)高時,雙向晶閘管控制角小,晶閘管輸出電壓高,負(fù)載小,功率因數(shù)低時,雙向晶閘管控制角大,晶閘管輸出電壓低,該設(shè)備對電機(jī)來講是透明的,它只是根據(jù)電機(jī)負(fù)載情況給出最合理的電壓,使電機(jī)的有功功率和無功功率之比達(dá)到最佳值,從而達(dá)到節(jié)能的目的。如何找到電機(jī)負(fù)載變化和控制器輸出電壓變化之間的對應(yīng)關(guān)系即控制算法,是本文研究的目的。
1 雙向晶閘管輸出電壓變化與晶閘管控制角的關(guān)系
晶閘管輸入端為三相正弦波電源,現(xiàn)以輸入電壓380 V、50 Hz動力電為對象說明,見圖1。

圖1 三相交流電壓波形
從三相正弦波圖形可看出,U、V、W三相互差120°相位角,考慮電源電壓的頻率是50 Hz,那么每相一周期的時間為20 ms,一周期為360°,每度對應(yīng)時間為55.56 μs,因此可將度數(shù)換算成相對應(yīng)的時間來表示。
本例中以U相電壓從負(fù)變正的瞬間作為時鐘基準(zhǔn)點,如想得到380 V輸出電壓,采用單片機(jī)控制方式檢測基準(zhǔn)點到來時刻,單片機(jī)立刻對U相晶閘管控制角觸發(fā),過 60°(3 333.6 μs)對 W相晶閘管控制角觸發(fā),再過60°對V相觸發(fā),在負(fù)半周,同樣經(jīng)過U、W、V相觸發(fā),經(jīng)過一周期360°后又回到時鐘基點,重復(fù)運(yùn)行,就可得到380 V輸出電壓。如想得到220 V輸出電壓,當(dāng)時鐘基點到來時 U相晶閘管控制角在延后60°(3 333.6 μs)觸發(fā),同理,W 相在 60°后再延遲60°觸發(fā),以此類推,就可得到220 V輸出電壓。380 V到220 V電壓變化對應(yīng)觸發(fā)角度為0~60°。但真正觸發(fā)時,因要使電源形成回路,所以一次觸發(fā)兩相,即U、V相同時觸發(fā),U、W相同時,V、W 相同時,V、U 相同時,U、W 相同時,V、W相同時觸發(fā)。
2 電機(jī)負(fù)載和功率因數(shù)角的關(guān)系
電機(jī)負(fù)載是感性負(fù)載,因此電流總要滯后電壓一個角度,而這個角度就是功率因數(shù)角,其大小由電機(jī)的負(fù)載決定,當(dāng)電機(jī)負(fù)載為額定負(fù)載時,其功率因數(shù)角最小,功率因數(shù)最大,達(dá)到0.9以上,當(dāng)電機(jī)為空載時,功率因數(shù)角最大,功率因數(shù)最小,約為0.16。可見,功率因數(shù)角變化完全可以反應(yīng)負(fù)載變化,所以,功率因數(shù)控制器根據(jù)電機(jī)負(fù)載的變化情況(功率因數(shù)的變化情況)來適時調(diào)整電機(jī)端電壓,使電機(jī)在輕載情況下也能保持較高的功率因數(shù),降低了無功功率,重載時又能及時增高電機(jī)端電壓,從而達(dá)到節(jié)能目的。
3 功率因數(shù)控制器的控制算法實現(xiàn)
功率因數(shù)角是電流滯后電壓的角度,而角度又可轉(zhuǎn)換成時間來表示,因此就可采用晶閘管電壓過零檢測電路和晶閘管電流過零檢測電路,通過單片機(jī)計算出兩個檢測點的時間差,通過換算就可得到功率因數(shù)角。
假設(shè)三相電是平衡的,以A相電壓由負(fù)變正的瞬間作為參考點,功率因數(shù)角的測量也以A相為準(zhǔn),當(dāng)時鐘參考點到來的時刻開始計算A相晶閘管關(guān)斷(電流為零)的時間,由上分析,時間可以換算成角度,這個時間就是電壓和電流之間的夾角(功率因數(shù)角),從而判斷出電機(jī)負(fù)載的大小。
根據(jù)功率因數(shù)的大小來調(diào)整電機(jī)端電壓的控制算法可以采用兩種方式,一種是恒功率因數(shù)控制方式,另一種是隨動功率因數(shù)控制方式,現(xiàn)分別加以說明。
3.1 恒功率因數(shù)控制方式
該方式采用一個固定的功率因數(shù)做比較點,如采用負(fù)載為額定負(fù)載53%的功率因數(shù)0.8做參考點,當(dāng)電機(jī)軟起動完成時,開始計算電機(jī)的適時功率因數(shù),當(dāng)功率因數(shù)比參考點功率因數(shù)低時,認(rèn)為是輕載,控制器就以每周期晶閘管控制角升1°的方式降低輸出電機(jī)端電壓,電機(jī)端電壓降低就引起功率因數(shù)升高,當(dāng)升高到與設(shè)定的功率因數(shù)相等時,電機(jī)端電壓穩(wěn)定。如果電機(jī)端電壓降到一個設(shè)定值(如220 V)時,功率因數(shù)仍低于設(shè)定值,為保證設(shè)備穩(wěn)定運(yùn)行,電壓被控制在設(shè)定值運(yùn)行。反之,當(dāng)電機(jī)適時功率因數(shù)比設(shè)定的功率因數(shù)高時,認(rèn)為電機(jī)負(fù)載加大,控制器就以每周期晶閘管控制角降1°的方式升高輸出電機(jī)端電壓,電壓升高功率因數(shù)相應(yīng)降低,當(dāng)電機(jī)適時功率因數(shù)與設(shè)定的功率因數(shù)相等時,電機(jī)端電壓穩(wěn)定。程序控制框圖見圖2。
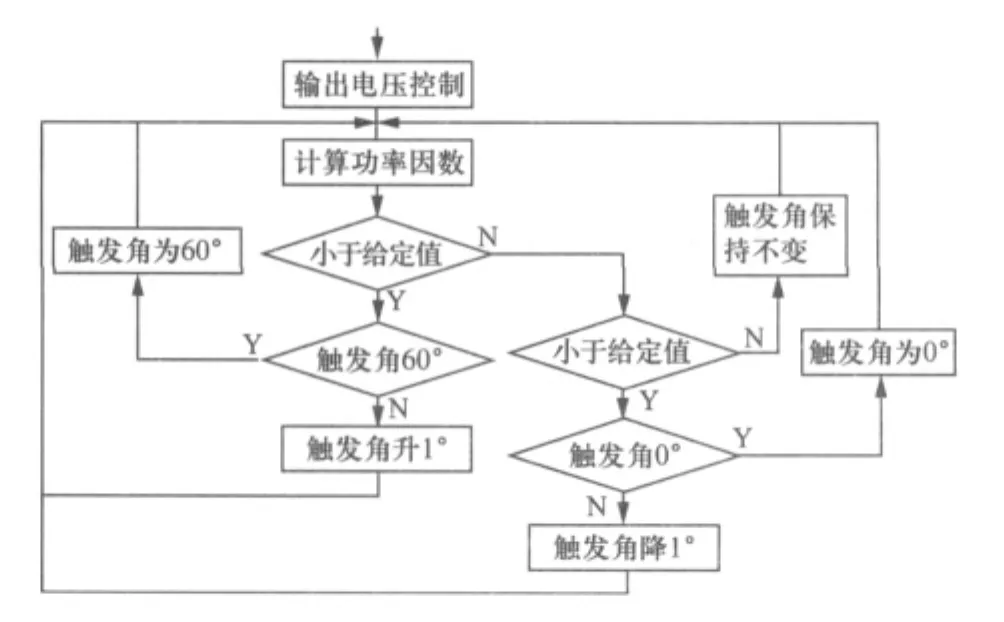
圖2 控制算法程序框圖
3.2 隨動功率因數(shù)控制方式
以相鄰兩次功率因數(shù)測量值做比較,如n次和n+1次相減,結(jié)果小于一個設(shè)定值,則認(rèn)為電機(jī)負(fù)載和輸出電壓相匹配,所以輸出電壓不變。n次和n+1次相減,當(dāng)結(jié)果大于一個設(shè)定值,并為正數(shù),則認(rèn)為電機(jī)負(fù)載為重載,可控硅輸出電壓被控制升高,直到功率因數(shù)差小于設(shè)定值,輸出電壓穩(wěn)定。n次和n+1次相減,當(dāng)結(jié)果大于設(shè)定值,并為負(fù)數(shù),則認(rèn)為電機(jī)負(fù)載為輕載,晶閘管輸出電壓被控制降低,直到功率因數(shù)差小于設(shè)定值,輸出電壓穩(wěn)定。
4 結(jié)語
通過對功率因數(shù)控制器控制算法的分析,提出了三相正弦波角度與時間的換算關(guān)系,使對角度控制的理論改為對時間進(jìn)行控制,從而為通過單片機(jī)控制方式對功率因數(shù)角進(jìn)行直接控制打下基礎(chǔ)。介紹了功率因數(shù)控制器的工作原理,給出了控制流程框圖,并提出了切實可行的控制方案,為實際制造該產(chǎn)品提供了必要的方式。
[1]王廣林,敬淑義,李志杰,等.感應(yīng)電動機(jī)隨動功率因數(shù)控制法節(jié)電控制的研究[J].節(jié)能技術(shù),2003(1):5-6.
[2]禹成七,于成軍,閻增奎,等.電機(jī)功率因數(shù)控制器的研究與設(shè)計[J].華北電力大學(xué)學(xué)報,1998(4):36-41.