基于轉矩觀測的分時換相策略的無刷直流電機直接轉矩控制
2012-08-28 06:50:02馮嘉鵬王喜順
電機與控制應用 2012年7期
馮嘉鵬, 王喜順
(華南理工大學機械與汽車工程學院,廣東廣州 510642)
設電機在t=0時換相,此時,AC相之間的電壓由Ud變成0,BC相之間的電壓由0變成Ud。設在t=toff時刻A相電流由I變為0,而B相電流由0變為iB(toff),而此后變化到穩定值I。即有iA(0)=I,iB(0)=0,iC(0)= - I。令 L=LS- LM,對式(1)進行拉普拉斯變化并代入初始條件,得到在區間[0 toff]內的電流方程為
同理,當t>toff時的電流方程為
0 引言
直接轉矩控制(Direct Torque Control,DTC)是由德國學者 M.Depenbrock和日本學者 I.Takahashi首先針對異步電機提出的一種先進的標量控制技術[1-2]。其基本原理是將電機的定子磁鏈和轉矩的觀察值與理想值相比較,再根據結果通過查表的方式選擇最優的電壓空間矢量,實現對轉矩的直接控制,其難點在于磁鏈軌跡的觀測與給定。文獻[3]首次設計了帶磁鏈觀察環節和轉矩觀察環節的DTC。但是所采用的轉矩觀察公式中包含兩個微分量,不但計算量大,而且易產生較大的誤差。文獻[4-5]通過分析認為二二相導通的無刷直流電機(Brushless DC Motor,BLDCM)換相轉矩波動產生的其中一個重要原因是關斷相的存在,從而提出一種三三導通的直接自控制策略。同時,針對傳統轉矩觀察公式含有微分量,采用了通過構造反電動勢函數的方法計算轉矩,從而減小計算量,提高觀察精度。
最佳分時換相策略是通過在二二相導通方式的換相期間適當地插入三三相導通方式來補償由于換相電流下降帶來的轉矩下降,其難點在于最佳分時時刻和各相導通時間長短的確定。文獻[6]分析了換流過程給轉矩波動帶來的影響,給出了一種選擇理想換相時刻的方法,就是通過測量反電動勢的大小并與電路總電壓作比較,當符合某一確定的比例關系時進行換相能保證轉矩不變。但該狀態下的電機處于加速階段,難以維持該狀態。文獻[7]通過分析換相時反電勢和換流過程對轉矩波動的影響,提出了分段控制辦法,在換相不同的時刻利用PWM的方式實現三相混合導通,以抑制轉矩波動。但是由于換相期間分段的依據是假設電流線性變化而推導的,與實際有一定的誤差,而且最后PWM的占空比計算公式較為復雜。
本文結合最佳分時換相策略和DTC的優點,用分時換相策略代替磁鏈觀察環節,同時將直接轉矩中的轉矩觀察用于分時換相時刻與分時時段長度的確定,設計出一種結構簡單,實用性強的BLDCM控制系統。仿真試驗結果表明,該系統在電機高速或低速運行時都能達到良好的轉矩波動抑制效果。
1 BLDCM模型與電壓方程
三相星型連接的BLDCM控制電路如圖1所示,電壓方程可用式(1)表示[8]:

式中:uA、uB、uC——三相輸入電壓;
eA、eB、eC——三相電動勢;
iA、iB、iC——三相電流;
Rs、Ls、LM——定子每相繞組的電阻、自感、定子任意兩相繞組間的互感。
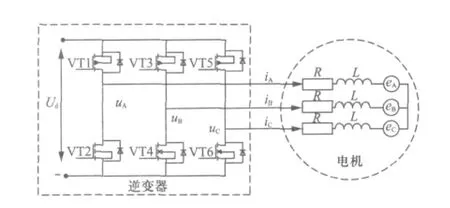
圖1 三相全橋連接BLDCM控制電路
2 換相時換流過程對轉矩波動的影響
忽略PWM控制和反電勢波形變化的影響,設相反電勢在換相期間保持不變,均為穩態值E或-E,則穩態時導通相的電流I穩定為

由于繞組電感的作用,在換相時電流不能突變,以AC相導通轉換到BC相導通的換相過程為例作分析,換相可能是上半橋換相或者是下半橋換相,其等效電路結構一致,只是電流流向相反,故,以上半橋換相為例作分析,等效電路圖如圖 2所示。在區間[0,t1]內電磁轉矩為

式中:Ω——電機機械角速度。
由式(3)可知,在不考慮反電動勢波動影響的情況下,換相時轉矩波動由關斷相電流決定,如上例中的電流iC。這也就是說通過分析關斷相電流在換相期間的變化就可以知道轉矩的變化。
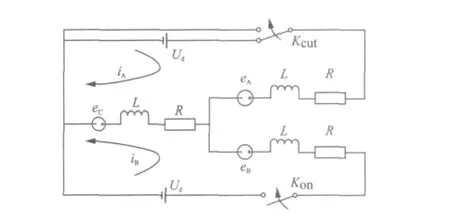
圖2 無刷直流電機上半橋換相過程等效電路
2.1 二二相導通方式換流過程對轉矩的影響
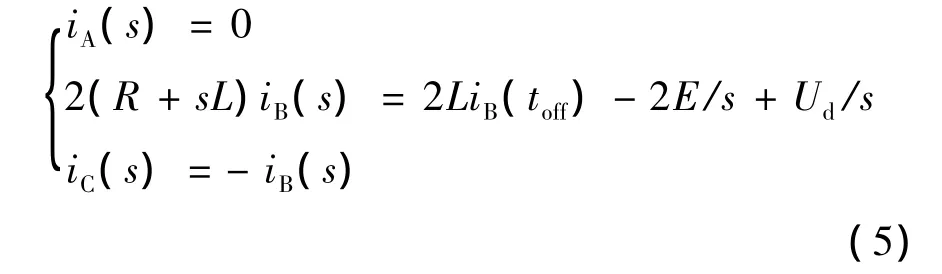
設電機在t=0時換相,此時,AC相之間的電壓由Ud變成0,BC相之間的電壓由0變成Ud。設在t=toff時刻A相電流由I變為0,而B相電流由0變為iB(toff),而此后變化到穩定值I。即有iA(0)=I,iB(0)=0,iC(0)= -I。令L=LS-LM,對式(1)進行拉普拉斯變化并代入初始條件,得到在區間[0toff]內的電流方程為
同理,當t>toff時的電流方程為
求出式(3)和式(4)的時域解,并把式(2)代入得
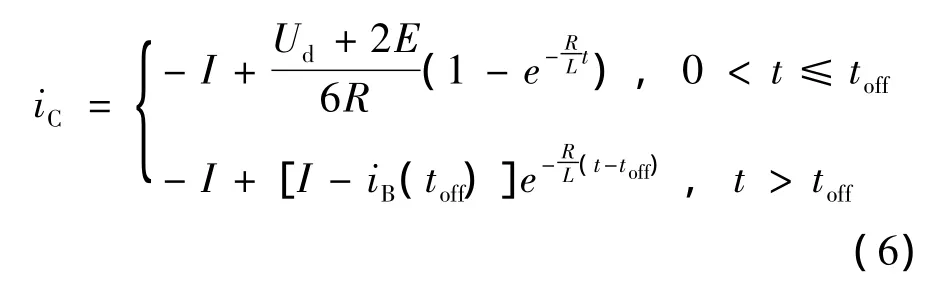

由式(6)可知在[0toff]區間,ic的幅值單調減少,而當t>toff時,ic幅值由iC(toff)單調增加到穩態值I,但在整個期間ic的幅值都小于穩態值。因此,對于二二相導通方式,由式(3)可知,換相期間的電磁轉矩始終小于穩態值,也就導致了電機運行期間的轉矩波動。該節公式具體推導過程可參考文獻[9]。
2.2 二三相混合導通方式換流過程對轉矩的影響
同樣以AC相導通轉換到BC相導通為例進行分析,設在ton時刻,開通B相,在tcut時刻關閉A相,且iA(toff)=0。采用二三相混合導通方式是指在換相期間通過提前導通關斷相的方式來補償轉矩的下降,即滿足ton<tcut<toff,同理可得換相期間的電流方程,并求得時域解為
由式(7)可知,在[0tcut]期間,iC的幅值由穩態值I單調增加到iC(tcut),而在[tcuttoff]期間開始回落,當t>toff時又開始由iC(toff)上升到穩態值I。由此可知,當換相期間提前導通關斷相會使iC的幅值有一個增加的過程,也就使電磁轉矩相應增加。如果通過適當的控制,在二二相導通方式換相期間適時地插入三相導通方式,補償由于換相所帶來的轉矩下降,就可以有效抑制轉矩的波動。但同時也產生一個問題,就是三相導通狀態應該在換相期間什么時刻插入和插入時間的長度。DTC當中的轉矩觀察環節能為解決該問題提供一個途徑。值得注意的是,在前面的分析當中,是假設反電動勢是理想的120°梯形波,但實際相反電動勢平頂寬度通常小于120°,這也會導致換相期間轉矩的下降[10]。但設計的方法是基于最終電磁轉矩的觀察結果為依據分時換相的,其本身就包含了對非理想電動勢帶來轉矩下降的補償。
3 基于轉矩觀測二三相混合導通的DTC
DTC方法的基本思路是通過分析得出電機運行時的磁鏈軌跡模型,然后將實際觀察得到的磁鏈值與磁鏈軌跡模型相比較,得出磁鏈的誤差信息。同時,也將觀察得到的轉矩值與給定值相比較,得出轉矩的誤差信息。最后依據這兩種信息在預先制定好的矢量表中得出最優的電壓空間矢量[11]。在實際應用中,一方面電機由于存在繞組漏磁等現象,實際磁鏈軌跡與理想模型有一定的差距;另一方面磁鏈不能直接觀察,只能通過相電流、相電壓和轉速等間接計算得到。這就會使最終得到的磁鏈誤差信息失真。在此基礎上,本文省去磁鏈觀察環節,將轉矩觀察得到的誤差信息用于電機換相時判斷插入三相導通狀態的時刻和插入時間長度,實現補償換相期間轉矩的下降,達到抑制轉矩波動的目的。同時由于省去了磁鏈觀察環節,降低了系統的復雜程度,實用性更強。
3.1 轉矩觀察環節
早期的文獻多通過磁鏈來計算轉矩,但由于磁鏈觀察誤差較大,以及該類計算公式都包含了微分量,所以不但計算量大,而且易引起較大的誤差。隨著對無刷直流電機研究的深入,提出了通過構造反電動勢函數的方法來估計反電動勢。從這以后的文獻多采用直接從轉矩的定義式(3)出發,通過三相反電動勢和三相電流計算電磁轉矩。
由式(3)可知,要計算電磁轉矩,除了要測量三相電流的值以外,還要測量反電動勢的值。但是直接測量反電動勢是很困難的。反電動勢法是先通過檢測BLDCM運行時梯形反電動的平頂段的起點與終點的角度差值x,然后依此構造出三個相位互差120°,幅值為1,平頂寬度為x的形狀函數,如圖3所示。對于BLDCM,平頂寬度x可通過位置傳感器的信號來實現。
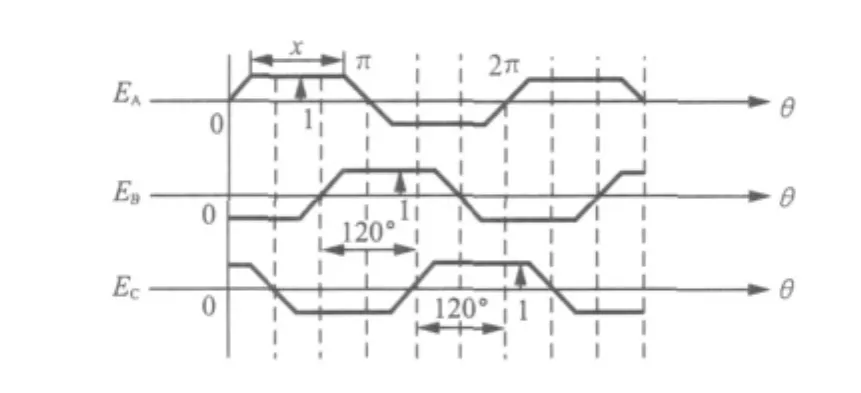
圖3 反電動勢形狀函數
反電動勢函數的平頂寬度為x,梯形斜邊的斜率為k=2/(π-x),三相反電動勢函數用分段函數的方式可表示為
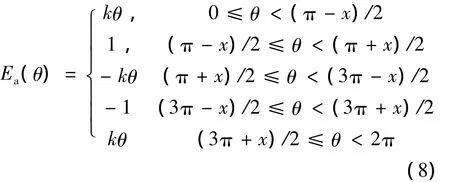
同理利用三相反電動勢的關系Eb(θ)=Ea(θ-2π/3),Ec(θ)=Ea(θ+2π/3)求得。
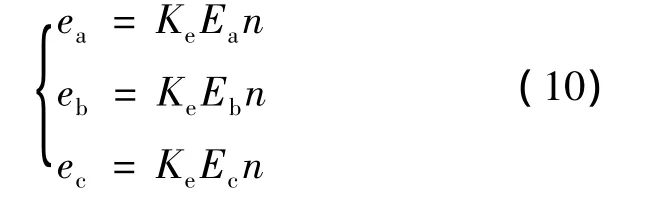
容易知道BLDCM梯形反電勢的幅值正比于轉速n[12],有以下公式:

式中:p——極對數;
α——計算極弧系數;
W——每相繞組有效串聯匝數;
Φ——每極磁通;
Ke——反電勢系數,均為常量。
聯合式(8)和式(9),有

3.2 控制開關表
開關表的作用是根據轉矩的誤差信息和轉子的位置信息選擇最優的電壓空間矢量。轉子的位置信息可通過位置傳感器測量,它主要是為開關表提供轉子所在扇區的信息。將轉子旋轉一圈(假設極對數為1)分成六個扇區(S1—S6),每個扇區占60o,如圖4所示。對于二二相導通方式,逆變器上下橋六個功率開關有六種開合組合。同樣,對于三三相導通方式也有六種開合組合。本文采用六位二進制數表示功率開關的開合狀態對應的電壓空間矢量,其中1代表功率開關導通,0代表功率開關不導通。例如當VT1、VT6導通時,AC相導通,B相不導通,電流從A想繞組流入,從C相流出,產生的合成電壓空間矢量就表示為U1(100001)。同理對于二二相導通方式有VT2、VT3、VT4、VT5、VT6;對于三三相導通方式有 VT61、VT12、VT23、VT34、VT45、VT56;具體如圖4和表1所示。表中T*為轉矩的給定值,T為轉矩觀察值,ΔT為誤差的控制范圍,U0(000000)為零矢量。BLDCM控制系統根據轉矩誤差的信息和位置信息(扇區),在開關表中選擇最優電壓空間矢量,不但可以實現正確的換相,同時可以適時抑制轉矩波動。
將式(10)代入式(3)得

表1 控制開關表
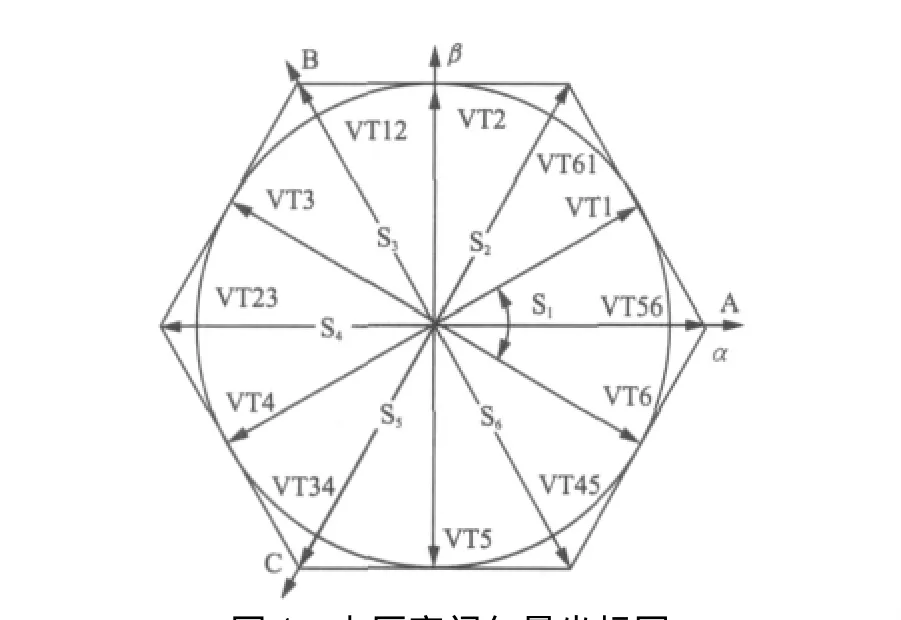
圖4 電壓空間矢量坐標圖
4 仿真與試驗
基于轉矩觀測二三相混合導通的BLDCM的DTC結構如圖5所示。在MATLAB/Simulink上建立仿真模型。仿真用的電機參數具體如下:極對數4;額定電壓24 V;額定轉速4 000 r/min;保持力矩0.063 N·m;反電動勢系數4.4 V/krpm;線電阻 1.8 ohms;線電感 0.54 mH;轉矩常數0.042 N·m/A;轉動慣量 24 g·cm2。本文針對不同的給定條件分別進行兩次仿真試驗,第一次試驗針對高轉速情況,給定條件是:二二相導通方式起動,給定轉速為2 000 r/min,空載起動,在0.015 s時刻突加轉矩0.15 N·m,在 0.03 s時刻轉變為二三相混合導通方式,在0.05 s時刻結束試驗。相電流曲線、轉矩曲線和速度曲線分別如圖6、圖8、圖10所示。第二次試驗針對低速場合,給定條件是:二二相導通方式起動,初始給定轉速為200 r/min,空載起動,在0.2 s時刻突加轉矩0.15 N·m,在0.4 s時刻轉變為二三相混合導通方式,在0.5 s時刻結束試驗。相電流曲線、轉矩曲線和速度曲線分別如圖7、圖9、圖11所示。
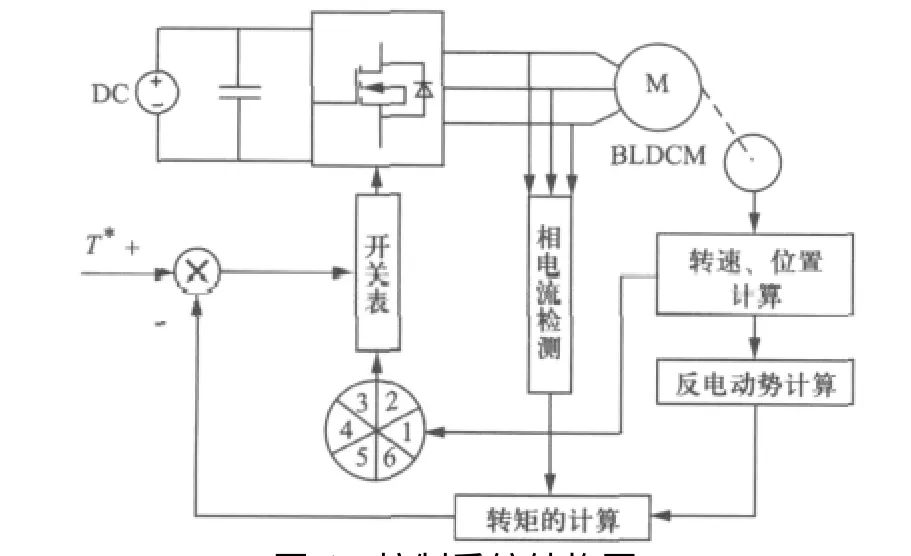
圖5 控制系統結構圖
通過仿真的結果,得出如下特點和規律:
(1)由圖6、圖8可看出,電機突加轉矩后,采用二二相導通方式時,電機在換相期間電流下降嚴重,達到穩態值的40%,這導致了轉矩下降為穩態值的40%,仿真結果與前文分析一致。當采用基于轉矩觀測的二三相混合導通方式時,由于提前導通了關斷相,換相轉矩下降得到了補償,轉矩的波動降為穩態值的5%。
(2)由圖10可看出,突加轉矩后的速度在額定值范圍內波動,范圍達±20 r/min。當采用二三相混合導通方式時,速度的波動明顯下降,波動范圍為±4 r/min。
(3)由圖7、圖9、圖11可看出,在低速運行時,二三相導通方式同樣達到了抑制轉矩波動的效果,相電流、轉矩分別降低到穩態值的4%和3%,速度波動范圍為±3 r/min。在低速運行場合,該方法對系統轉矩波動的抑制更加有效。

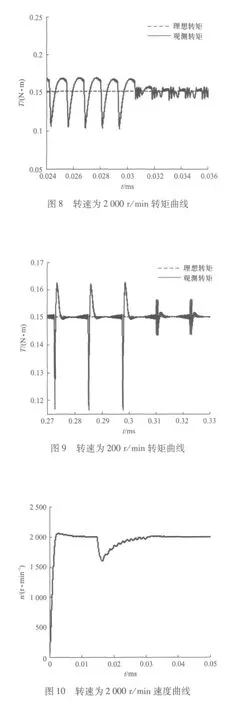
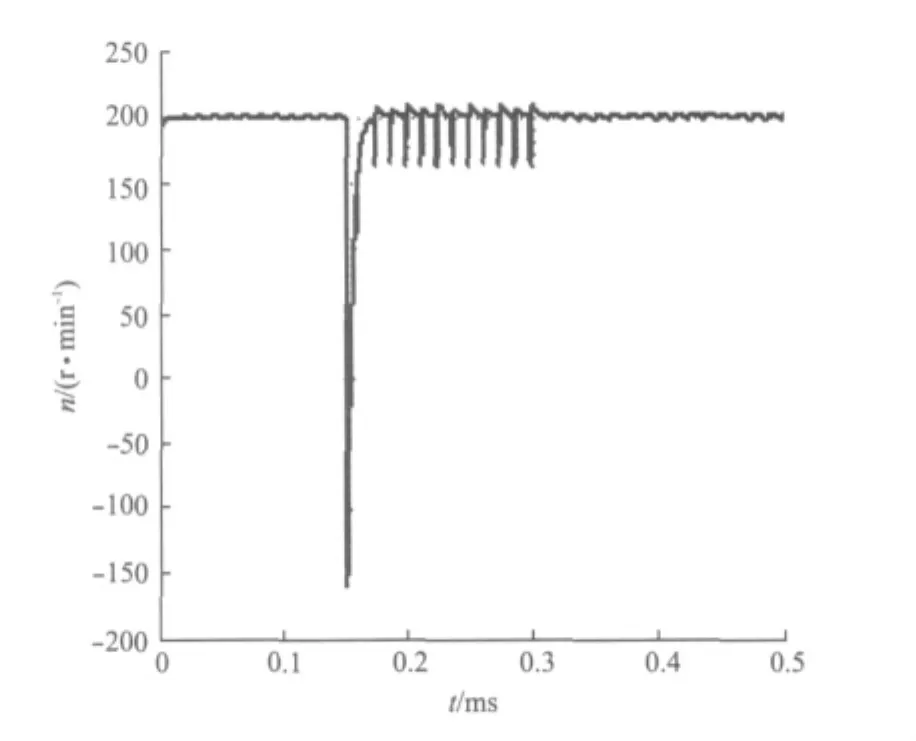
圖11 轉速為200 r/min速度曲線
5 結語
(1)二二相導通方式BLDCM在換相期間會產生轉矩的下降,通過提前導通關斷相能補償轉矩的下降;
(2)基于轉矩觀測的二三相混合導通方式的DTC不但能有效抑制轉矩波動,而且結構簡單,實用性強;
(3)本文設計的方法在低速運行場合同樣有良好的效果。
本文基于簡化DTC系統使其更適合實際應用的目的,設計出一種基于轉矩觀測的二三相混合導通方式的DTC系統,仿真試驗結果表明,該系統不但能有效抑制電機的轉矩波動,而且結構簡單,易于實現,為DTC的實際應用提供了一條有效的途徑。
[1]DEPENBROCK M.Direct self-control(DSC)of inverter-fed inductionmachine[J].IEEE Trans Power Electro,1988,3(4):420-429.
[2]BAADER U,DEPENBROCK M.Direct self control(DSC)of inverter-fedinduction machine:a basis for speed control without speed mesurement[J].IEEE Trans on Ind Application,1992,28(3):581-588.
[3]LIU Y,ZHU Z Q,HOWE D.Direct torque control of brushless DC drives with reduced torque ripple[J].IEEE Trans on Ind Application,2005,41(2):599-608.
[4]YANG J F,HU Y W,HUANG W X,et al.Direct torque control of brushless DC motor without flux linkage observation[J].IEEE2009 IPEMC,2009:1934-1937.
[5]高瑾,胡育文,黃文新,等.六邊形磁鏈軌跡的無刷直流電機直接自控制[J].中國電機工程學報,2007,27(15):65-69.
[6]CARLSON R,LAJOIE M M,FAGUNDES J C S.Analysis of torque ripple due to phase commutationin brushless DC machines[J].IEEE Trans on Industry Application,1992,28(3):632-638.
[7]李懷兵,丑武勝,張延超.換相期間無刷直流電機轉矩脈動的抑制策略[J].電機控制與應用,2011,38(11):20-24.
[8]阮毅,陳維鈞.運動控制系統[M].北京:清華大學出版社,2006.
[9]夏長亮.無刷直流電機控制系統[M].北京:科學出版社,2009.
[10]張磊,瞿文龍,陸海峰,等.非理想反電勢無刷直流電機轉矩直接控制方[J].清華大學學報(自然科學版),2007,47(10):1570-1573.
[11]丁祥.永磁直流無刷電機直接轉矩控制系統的設計研究[D].長沙:湖南大學,2009.
[12]李鐘明,劉衛國.稀土永磁電機[M].北京:國防工業出版社,2001.