永磁同步電機轉動慣量辨識研究
2012-08-28 06:49:30杜帥
電機與控制應用 2012年4期
杜 帥
(1.浙江大學電氣工程學院,浙江杭州 310027;
2.中國人民解放軍駐162廠軍事代表室,貴州安順 561018)
0 引言
轉動慣量對電機控制的準確性有著重要影響。由于轉動慣量隨著負載的擾動而變化,為了保證伺服系統(tǒng)的控制精度,需要對轉動慣量進行辨識,獲得轉動慣量的準確數(shù)值。現(xiàn)有的轉動慣量的辨識方法主要有基于狀態(tài)觀測器的辨識方法、基于卡爾曼濾波的辨識方法及基于自適應的辨識方法[1-3]。基于狀態(tài)觀測器的辨識方法通過狀態(tài)觀測器觀測狀態(tài)變量值,利用估計出的狀態(tài)變量值計算轉動慣量。該方法需要調節(jié)狀態(tài)觀測器的調節(jié)增益,對于高階狀態(tài)方程,調節(jié)難度大。基于卡爾曼濾波的辨識方法,轉動慣量作為卡爾曼濾波器的狀態(tài)變量,卡爾曼濾波器輸出得到辨識結果。基于自適應的辨識方法,調整控制器參數(shù),使參考模型輸出和系統(tǒng)實際輸出之差滿足性能指標函數(shù),得到轉動慣量的辨識值。本文采用了一種低階觀測器對擾動負載轉矩進行觀測,同時采用積分方法辨識轉動慣量。算法具有實現(xiàn)簡單、收斂快速等優(yōu)點。通過仿真和試驗驗證了該方法的正確性。
1 電機驅動系統(tǒng)模型
電機驅動機械系統(tǒng)原理圖如圖1所示,電機控制系統(tǒng)機械方程為


式中:ωr——轉子機械角速度;
θr——轉子機械角度;
J——轉動慣量;
B——粘滯摩擦系數(shù);
Te——電磁轉矩;
TL——負載轉矩;
kt——電機轉矩常數(shù);
iq——q軸電流。

圖1 電機驅動機械系統(tǒng)原理框圖
2 辨識策略研究
圖2所示為基于擾動負載轉矩觀測器和轉動慣量辨識的電機控制系統(tǒng)框圖。q軸電流iq和編碼器測得的電機轉速ωr作為擾動負載轉矩觀測器的輸入,觀測器的輸出是擾動負載轉矩的觀測值。將和ωr作為轉動慣量辨識模塊的輸入,轉動慣量辨識模塊的輸出是辨識出的轉動慣量。轉動慣量辨識值反饋到擾動負載轉矩觀測器,更新方程中的轉動慣量值。通過反復迭代,最終辨識出電機的轉動慣量真值。

圖2 電機控制系統(tǒng)框圖
2.1 擾動負載轉矩觀測器
在式(1)中,需要辨識的參數(shù)有轉動慣量、負載轉矩、粘滯摩擦系數(shù)。辨識的主要目的是得到電機的轉動慣量值,所以可將負載轉矩項和擾動轉矩項進行合并,合并后到得擾動負載轉矩。將
式(1)等號右側第二項、第三項合并,可得到:

式中:Tdis——擾動負載轉矩;
T^dis——擾動負載轉矩的觀測值;
J*——轉動慣量的真實值;
J^——轉動慣量的觀察值;
ΔJ——轉動慣量觀測值與真實值的誤差。
由于電流采樣頻率遠高于負載轉矩變化頻率,因此假設采樣期間擾動負載轉矩為常數(shù)。由此可得

根據(jù)式(1)、式(4)、式(7),可得時域狀態(tài)方程為

式中,電機轉子角速度ωr和擾動負載轉矩Tdis為狀態(tài)變量,x=[ωrTdis]T,電機電磁轉矩Te為輸入,u=Te,轉子角速度 ωr為輸出,y=ωr。

由狀態(tài)方程(8)構建擾動負載轉矩Tdis的最小階觀測器[4],方程如下:


擾動負載轉矩觀測器的框圖如圖3所示。
2.2 積分辨識法辨識轉動慣量
伺服系統(tǒng)中,電流環(huán)時間常數(shù)遠小于速度環(huán)時間常數(shù),在電流環(huán)采樣期間,電機負載變化緩慢,可視為恒定值。選取測試速度信號為周期信號,即ωr(t)=ωr(t+T),將速度信號微分值
式中,z為中間變量;-λ為狀態(tài)觀測器極點(λ>0)。對式(9)、式(10)進行拉式變換,并約去中間變量,得等式:(t)乘以式(5)的每一項,并在一個周期內積分,得式(12):

圖3 擾動負載轉矩觀測器框圖

式中,右側第三項是由粘滯摩擦系數(shù)引起的擾動負載項:

該項在一個速度周期內的定積分為零,即粘滯摩擦系數(shù)引起的擾動負載積累為零。
式(12)右側第二項中,負載轉矩可視為常量,定積分結果為該項在一個周期內定積分為零,即負載轉矩積累為零。

通過消除以上兩項,式(12)可簡化為

變換式(15)可得到轉動慣量的觀測值為

3 仿真及試驗
針對本文的轉動慣量辨識算法,進行了仿真和試驗驗證。運用MATLAB的SimPowerSystem Toolbox工具搭建了永磁同步電機轉子磁場定向矢量控制系統(tǒng)仿真模型。采用 TI公司的DSP2812作為控制芯片,設計了永磁同步電機伺服驅動控制器,建立了永磁同步電機試驗平臺。
在仿真和試驗中,電機的轉速給定信號采用周期為0.2 s,幅值為200 r/min的梯形波信號。
3.1 仿 真
永磁同步電機空載時,電機轉動慣量真實值為1.2×10-3kg·m2。為了驗證算法的正確性,電機轉動慣量給定不同的初始值。圖4所示的仿真中,電機轉動慣量初始值為0.5×10-3kg·m2;圖5所示的仿真中,電機轉動慣量初始值為10×10-3kg·m2。

圖4 轉動慣量初始值為0.5×10-3kg·m2時,仿真波形
圖4(a)為轉動慣量辨識圖,經過3個速度周期,轉動慣量從初始值0.5×10-3kg·m2辨識得到了真實值。圖4(b)為擾動負載轉矩辨識結果,在第一個速度周期結束后,擾動負載轉矩輸出結果為零,第二個速度周期中,由于轉動慣量辨識結果存在誤差,擾動負載轉矩辨識結果產生較大波動,在第三個速度周期,轉動慣量收斂到真實值,擾動負載轉矩辨識接近真實值。圖4(c)是電機轉速波形。
圖5(a)所示的仿真中,轉動慣量從初始值10×10-3kg·m2經過三個速度周期,收斂到真實值1.2 ×10-3kg·m2。圖 5(b)為擾動負載轉矩辨識波形圖,在第二個速度周期擾動負載轉矩波動較大,第三個速度周期轉動慣量收斂到真實值以后,擾動負載轉矩波動減小。圖5(c)是電機轉速波形。

圖5 轉動慣量初始值為10×10-3kg·m2時,仿真波形
3.2 試 驗
基于DSP2812搭建了伺服控制系統(tǒng)試驗平臺,被控永磁同步電機功率為1 kW,電機轉動慣量為1.2×10-3kg·m2。在此伺服控制系統(tǒng)試驗平臺上,分別進行了單電機空載條件下轉動慣量的辨識試驗、拖動電機空載條件下轉動慣量的辨識試驗,以及拖動電機并施加負載轉矩條件下轉動慣量的辨識試驗。
圖6為單電機空載情況下轉動慣量和擾動負載轉矩辨識波形。兩次試驗中,轉動慣量初始值分別設為0.5 ×10-3kg·m2和10 ×10-3kg·m2。從圖6(a),圖6(c)可看出,兩次試驗中轉動慣量均能收斂到真實值,與真實值誤差均小于8%。從圖6(b),圖6(d)可看出,擾動負載轉矩辨識結果在零轉矩波動,這是由于粘滯摩擦引入的摩擦轉矩,以及系統(tǒng)的非線性和轉動慣量辨識誤差引入的擾動轉矩誤差。

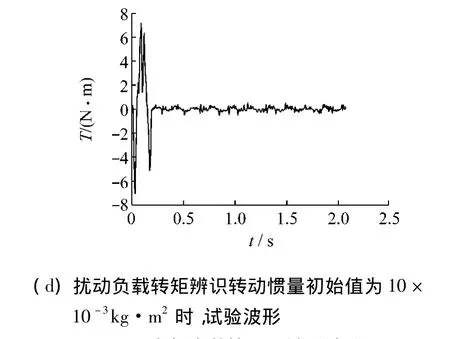
圖6 電機空載情況下試驗波形
永磁同步電機拖動電機,被拖動電機不施加負載情況下,轉動慣量總和為2.7×10-3kg·m2。在該情況下,轉動慣量初始值分別設為0.5×10-3kg·m2和10 ×10-3kg·m2,兩次試驗結果如圖7所示。在不同的初始值條件下,經過幾個速度周期的辨識,轉動慣量和擾動負載轉矩均能辨識得到真實值,轉動慣量辨識值的準確率大于90%。
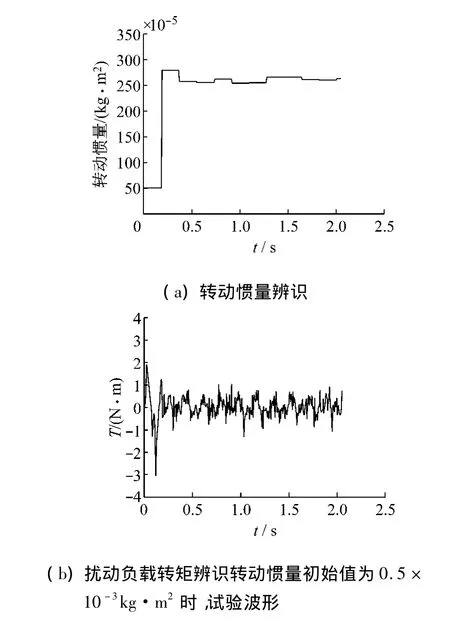
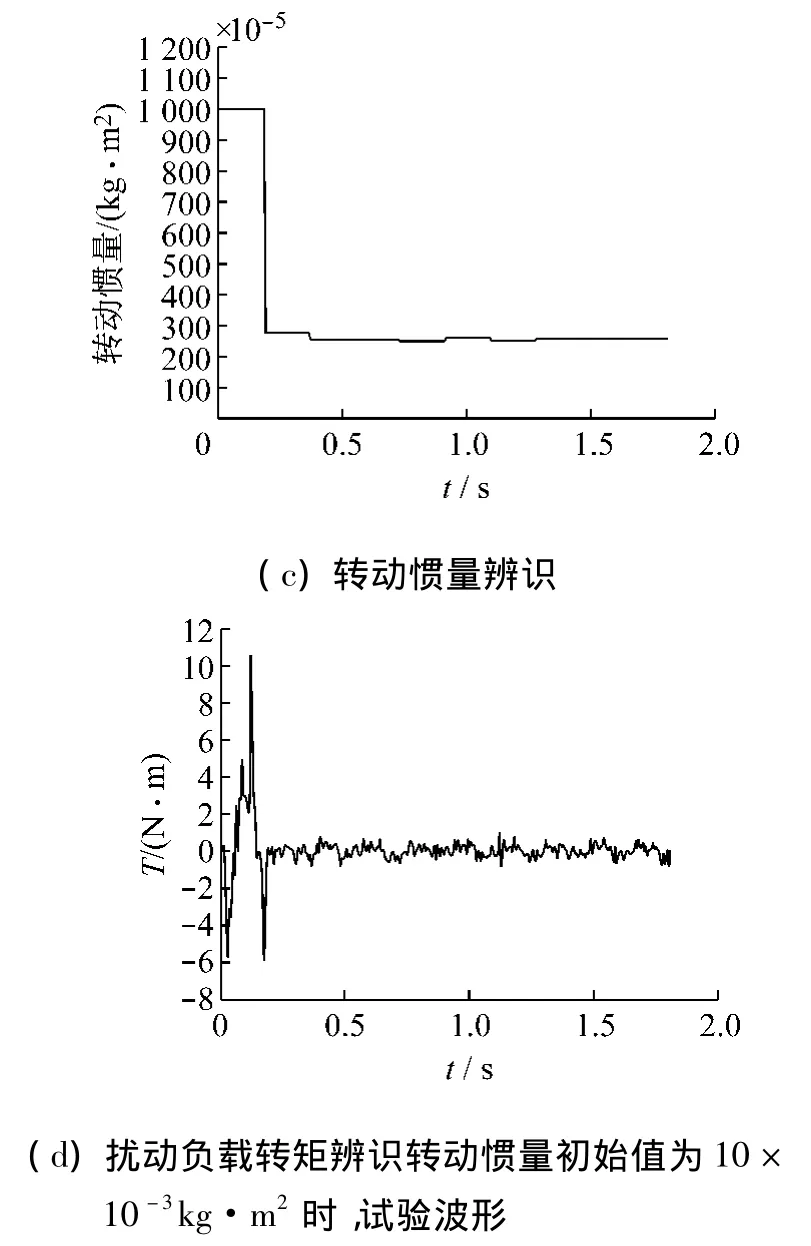
圖7 電機拖動負載電機情況下試驗波形

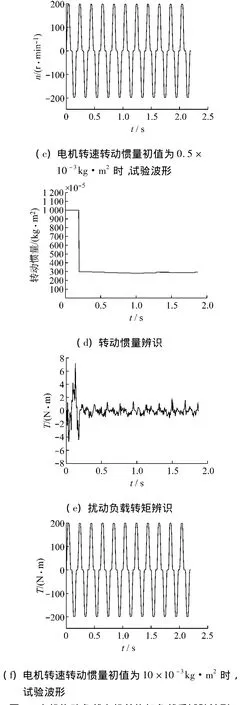
圖8 電機拖動負載電機并施加負載后試驗波形
圖8所示為電機拖動負載電機并施加負載后,轉動慣量和擾動負載轉矩辨識波形。永磁同步電機拖動負載電機后,電機轉動慣量總和為2.7 ×10-3kg·m2。給被拖動電機施加負載轉矩后,并沒有改變總的轉動慣量,轉動慣量仍然能夠收斂到真實值。圖8(a)、圖8(b)、圖8(c)為轉動慣量初始值為0.5×10-3kg·m2情況下,轉動慣量、擾動負載轉矩及電機轉速的波形。圖8(d)、圖8(e)、圖8(f)為轉動慣量初始值為10×10-3kg·m2情況下,相應的試驗波形。
4 結語
本文介紹了基于擾動負載轉矩狀態(tài)觀測器計算轉動慣量的辨識算法,該方法具有算法簡單,調節(jié)參數(shù)少,程序容易實現(xiàn)等優(yōu)點。在不同情況下,以及在不同的初始條件下,通過仿真和試驗均驗證了該方法的有效性和正確性。應用該方法能夠得到準確的轉動慣量和擾動負載轉矩辨識結果。
[1]YANG S M,DENG Y J.Observer-based inertial identification for auto-tuning servo motor drives[C]∥in Industry Applications Conference,2005(2):968-972.
[2]HONG S J,KIM H W,SUL S K.A novel inertia identification method for speed control of electric machine[C]∥ Proceedings of the IEEE International Conference on Industrial Electronics,Control,and Instrumentation,1996(2):1234-1239.
[3]GUO Y J,HUANG L P,MURAMATSU M.Research on inertia identification and auto-tuning of speed controller for AC servo system[C]∥Proceedings of the Power Conversion Conference,Osaka,Japan,2002(2):896-901.
[4]AWAYA I,KATO Y,MIYAKE I,et al.New motion control with inertia identification function using disturbance observer[C]∥Proceedings of the 1992 International Conference on Industrial Electronics,Control,Instrument,and Automation,1992(1):77-81.
[5]KWON T S,SUL S K,NAKAMURA H,et al.Identification of the mechanical parameters for servo drive[C]∥Proceedings of Industry Applications Conference,2006(2):905-910.
[6]FUKASHI.Moment of inertia identification using the time average of the product of torque reference input and motor position[J].IEEE Transactions on Power Electronics,2007,22(6):2534-2542.
