基于GPS的整車性能測試技術
2012-08-29 05:18:28范思廣
汽車零部件 2012年1期
范思廣
(武漢理工大學,湖北武漢430070)
0 前言
現階段的整車道路試驗中,微波與光電技術是主要的測試手段,但其構成復雜、笨重、受試驗環境影響大,一直是這些技術無法解決的瓶頸,如何更快、更準確地完成檢測任務成為大家關注的焦點。同時,側傾角等參數運用現有的傳感器很難測量,隨著GPS(全球定位系統)技術的成熟,這些問題都可以得到解決。GPS(全球定能系統)是隨著現代科學技術的迅速發展而建立起來的新一代精密衛星導航與定位系統。從1978年發射第一顆GPS試驗衛星以來,利用該系統導航與定位的研究、開發和實驗工作發展異常迅速。GPS具有全球覆蓋、全天候、全天時、高精度等優點,可實現定位、定時、定速功能。因此它在軍方、民用、飛機、艦船、火車、汽車等方面都得到了廣泛的應用。
1 GPS的基本構成及定位原理
GPS主要有三大組成部分,即空間星座部分、地面監控部分和用戶設備部分。
空間星座都分由24顆衛星組成。其中包括3顆備用衛星,分布在6個與赤道面呈55°傾角的平面內,各軌道平面升交點的赤經相差60°,在相鄰軌道上,衛星的升角相差30°。正是由于這種合理的布局,使地球上任何位置均能同時觀測到至少4顆衛星,從而保證了其全球性、連續性及其實時性。
地面監控部分目前主要由分布于全球的5個地面站組成,其中包括衛星監控站、主控站以及信息注入站。
用戶設備主要由GPS接收機硬件和數據處理軟件以及微處理機及其終端設備組成。它的主要任務是接收GPS衛星發射的信號,以獲得必要的導航和定位信息及觀測量,并經數據處理而完成導航和定位工作。
GPS定位問題實質上屬于無線電定位問題。從幾何角度上,分別有兩種:單點定位幾何模型和雙點定位幾何模型。對于這兩種幾何模型,基本上可歸納為一種簡單的幾何模型。如圖1所示。
對于空間位置已知的三點S1、S2、S3及待測定位點P,P點必處于S1、S2和S3為圓心,三個距離為半徑的三個球面的交點上。若能測出到三個點的距離,則可唯一確定出P點到已知點的距離。在GPS的系統中,已知點的位置通過GPS衛星所播發的導航電文來確定。而待測點位置,即GPS接收機的位置,可由測定出GPS衛星信號發射天線至接收機天線的時延t,再由公式Pi=Psi=vt得出 (其中v為電磁波傳播速度)。至于延時,則由觀測量得出。由此進行解算,實現對P點定值。
2 基于GPS的整車性能測試技術
2.1 車速的測量
當衛星與GPS天線做相對運動時,衛星發射頻率與GPS天線接收頻率之差Δf稱為多普勒頻移,它與相對運動的速度Δv成正比,這就是多普勒效應,即:
式中:f1為地球坐標系中GPS天線接收到的載波頻率;
f為衛星發射載波的頻率;
c表示光速;
v2為衛星相對于大地的速度;
v1為GPS天線相對于大地的速度,即車速。
衛星相對于大地的速度可由軌道坐標系中衛星運動瞬時速度轉換求得,軌道坐標系中衛星運動瞬時速度按下式計算:
式中:a為已知軌道參數;
E為偏近點角;
e為軌道橢圓離心率。
GPS測量車速正是運用了多普勒效應,其精度可達0.1 km/h,分辨率可達0.01 km/h。同時GPS接收機計算相對時間,其精度可達0.01 s。由高精度的速度與時間通過積分和微分即可得到整車測試中的相對距離與加速度,其中距離精度可達0.05%,加速度精度可達0.5%。表1和圖2是使用法國Thales 100 Hz GPSOEM板 (實時100次頻率掃描解算)測量某車型加速性能的實驗結果。
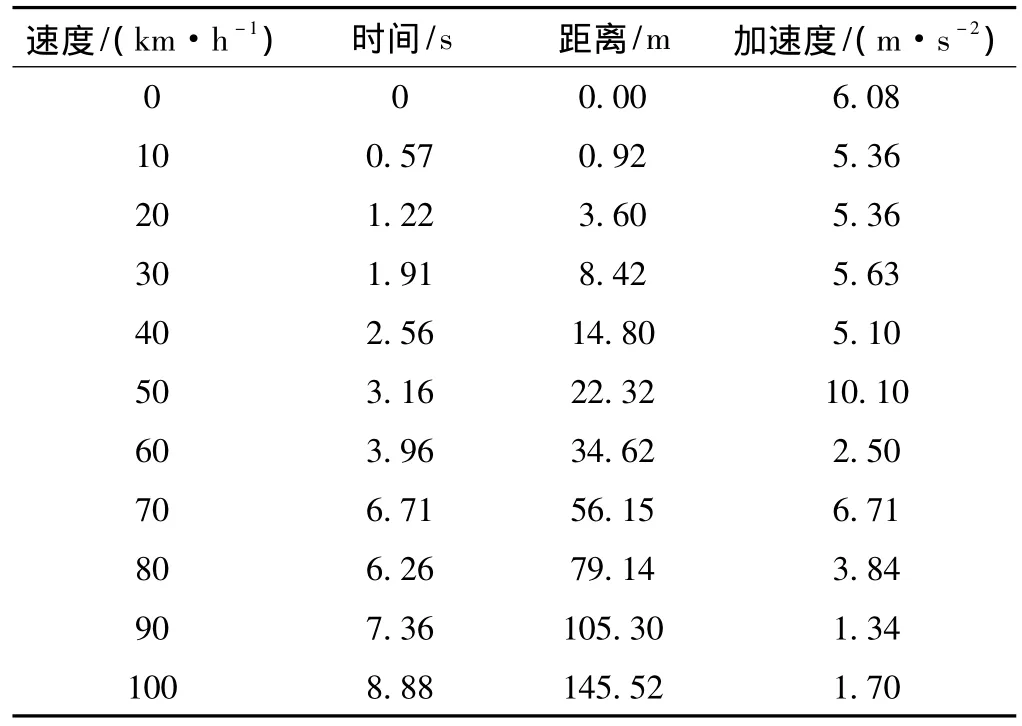
表1 某車型加速度性能測試結果
2.2 方位角的測量
GPS接收機通過解算導航電碼并進行地球坐標系轉換可以得到車輛運動方向的方位角,即車輛運動方向與正北方向的夾角。因此,在制動跑偏、直線自由行駛跑偏試驗中可以精確計算車輛運動的偏移量,同時在操縱穩定性試驗中可以用作航向角。下面分析使用GPS技術測量跑偏的原理和方法。
如圖3所示,建立以起始進線方位為y軸、跑偏量為x軸的坐標系,坐標系0點為車輛的起始跑偏計算點。假設車輛向右發生跑偏,軌跡如圖3所示。設入線方位角為θ0,車輛運動方向的瞬時方位角為θi,則運動方向與中心線的夾角Δθi=θiθ0。將整個車輛運動過程采樣等分成n單位點,車輛所在位置與中心線的差值即行駛跑偏量設為s,車輛在相鄰單位點之間的斜線距離差為L,在單位點間距足夠小的情況下,車輛運動方向就是相鄰單位點的連線,則有:
使用采樣頻率足夠高的GPS引擎可以使行駛跑偏量的精度達到厘米級。圖4是使用法國Tha—les 20 Hz GPSOEM板測量某車型在某U形路面以50 km/h制動的跑偏量結果。從中可見,在車輛制動停止的過程中,車輛向右跑偏。
2.3 多路GPS引擎對俯仰角與側傾角的測量
在車頂安裝3條GPS天線,并分別使用3個GPS引擎,如圖5所示構成載體坐標系。通過對坐標系中3條天線的GPS位置信息與彼此間的連線距離,根據三角函數可以解算出坐標系所在平臺的姿態角度。
以天線0為坐標零點,則3條天線的原始坐標為 (0,0,0)、(-x1,-y1,0)、(x2,-y2,0)。發生俯仰時,3條天線的坐標變化為 (0,0,0)、(-x1',-y1',z1')、(-x2',-y2',z2'),則俯仰角:
側傾角:
式中:l1,2、l1,0'、l0,0'分別為天線 1 與2、天線 1 與0 點、天線0與0點的連線距離。
天線彼此間的連線距離越長,測量精度越高。不同的天線彼此間的連線距離,所測量得到的姿態角度精度如下:0.5 m距離,精度為0.5°;1.0 m距離,精度為0.25°;2.0 m距離,精度為0.1°。
使用雙GPS引擎,將其一前一后放置于車頂 (如圖6所示),兩天線連接所在的直線方位角 (車身位置方位角)與后天線測得的車輛運動方位角之間的差值即為側傾角。側傾角在車輛的快速過彎特性與臨界失控性能評價中有著非常重要的參考意義。
圖7、8是使用Thales 20 Hz三天線系統測量某車型操縱穩定性穩態回轉試驗中車廂側傾角特性與急速變道試驗中側傾角的結果。
2.4 行駛軌跡的測量
汽車的行駛軌跡是由若干個點組成,即軌跡的測量是一系列空間點的定位測量。被測汽車在某一路線上行駛,移動站分系統進行數據采集和數據處理后給出被測汽車所經過路線上若干點的坐標值,把這一系列點位連接起來,就形成了汽車的行駛軌跡,即汽車的行駛軌跡是通過測試汽車的行駛動態點位擬合而得到的,動態點位的定位準確度決定了汽車行駛軌跡的測試準確度。
這些點位與汽車行駛速度和GPS接收系統的采樣速率有關,本試驗為20 Hz的數據更新率,閉合路線的里程為2 323.5 m,車速約30 km/h,采集到的坐標點為6 000多個,每兩點之間相隔約39 cm,這條行駛軌跡曲線實際上就是由這6 000多個點位坐標擬合而成的。利用鼠標點擊這條軌跡上的任意一點,就能立即顯示出該點的坐標值以及經過該點的時刻等。
2.5 側滑、橫擺 (距離)的測量
汽車的側滑、橫擺是描述汽車在制動、轉彎等情況下,由于整車的重心轉移、地面條件和輪胎狀況等因素所引起的汽車整體向某一側面的滑動,或車頭、車尾等汽車的某一部位往側向 (橫向)發生偏擺,即汽車從預期的正常行駛軌跡向側面移動了一定距離。所以,汽車行駛中的側滑、橫擺可歸結為距離的測試。距離測試是GPS技術的主要功能,它所具有的測試速度快、準確度高、不要求通視、不分晝夜、不受天氣影響等優勢是傳統的距離測試方法不可比擬的。我們進行了若干次的汽車行駛中的側滑、橫擺測試實驗,測試結果與其他方法測得的結果非常一致。
2.6 汽車ABS滑移率、制動距離的測量

表2 滑移率部分測試數據
滑移率是ABS的重要參數,它表征汽車在制動情況下ABS防抱死的特性。理想狀況下汽車制動時,車速既要下降,又不能被完全抱死而滑動 (拖動),但實際情況總是或多或少要產生滑動。滑移率是ABS系統制動時車輪滑動與滾動關系的物理量,是汽車車體從制動開始到車停止時所行進的距離s和車輪滾過的長度L的差值與s之比。汽車ABS制動時的滑移率為:
車載GPS系統與專用汽車輪速測試裝置同時處于工作狀態,以20~60 km/h速度行駛中的汽車在t1時刻踩剎車實施制動,當汽車停車時再次記錄下對應時刻t2。在GPS接收系統儲存的數據中讀取與時刻t1及t2時刻對應的汽車坐標值,計算出汽車行進距離s。與此同時,安裝在車輪上的光電探測器在t1時刻開始記錄脈沖數直至t2,測得總脈沖數n;通過實測車輪在地面上滾動一圈的長度確定每個脈沖所代表的長度a,進而求得在t1與t2之間車輪的滾動距離L=a×n,則按公式計算滑移率。滑移率也可用速度方法進行測量,即車輪的線速度(w×r)與車體的行進速度v的差值與v之比。即
式中:w為車輪旋轉角速度,rad/s;
r為車輪半徑,m。
制動距離是汽車從制動開始到停車所行進的距離s,所以在進行滑移率實驗的同時,制動距離也一并測得。在試驗場進行了滑移率和制動距離的場地測試實驗,表2列出了部分測試數據。
3 結束語
GPS技術為整車性能測試提供了一種非常快捷而精確的方法,豐富了檢測手段。GPS能完成對行駛跑偏量、側傾角等的測量,填補了現階段國內其他設備無法測量的空白。隨著DGPS、RTK等技術的不斷發展,未來GPS的精確軌跡圖繪制功能還會應用到ESP等試驗中。由于GPS測量精度高、安裝簡單、使用方便、可靠性好、不受天氣與環境影響等,它必定會在未來汽車動力性、操縱控制性、ESP、行駛跑偏量、急速變道、U形與魚鉤試驗等整車測試中得到廣泛應用。
【1】張勤,李家權.GPS測量原理及應用[M].北京:科學出版社,2005.
【2】王存良.GPS定位和測速的解算過程[J].測控技術,2003(1).
【3】GB/T12676-1999汽車制動系統結構、性能和試驗方法[S].
【4】韓曉東,張靜.車載平臺GPS姿態測量[J].工程勘察,2004(2).
【5】馮超,鄔惠樂.汽車工程手冊(試驗篇)[M].北京:人民交通出版社,2001.
【6】劉美生.全球定位系統及其應用綜述(三)[J].中國測試技術,2007,33(1).
猜你喜歡
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
汽車與安全(2019年9期)2019-11-22 09:48:03
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
決策探索(2014年21期)2014-11-25 12:29:50
