淺談真空熱處理爐的溫度控制
2012-08-29 12:06:32趙興亮劉鋒敏
裝備制造技術 2012年7期
關鍵詞:系統
趙興亮,劉鋒敏
(中國電子科技集團公司第二研究所,山西 太原 030002)
溫度控制已成為工業生產、科研活動中很重要的一個環節,能否成功地將溫度控制在所需的范圍內,關系到整個活動的成敗。由于控制對象的多樣性和復雜性,導致采用的溫控手段的多樣性。在真空熱處理設備的溫度控制系統中,首先將需要控制的被測參數溫度,由傳感器轉換成一定的信號后,再與預先設定的值進行比較,把比較得到的差值信號,經過一定規律的計算后,得到相應的控制值,此時將控制量送給控制系統進行相應的控制,而且不停地進行上述工作,從而達到自動調節的目的。
1 熱電偶簡介
1.1 原理
熱電偶的測溫原理是基于1821年塞貝克發現的熱電現象。如圖1 所示,把兩種不同的導體或半導體材料A、B 連接成閉環回路,并將它們的兩個連接點,分別置于溫度為T 及T0(設T>T0)的熱源中,該回路內就會產生熱電動勢(簡稱熱電勢),可用EAB(T,T0)表示,這種現象即稱作熱電效應。

圖1 熱電偶的測溫原理
我們把兩種不同導體或半導體的這種組合,稱為熱電偶,A 和B 稱為熱電極,溫度高的接點稱為熱端(或工作端),溫度低的接點稱為冷端(或自由端)。
1.2 對熱電偶電極材料的基本要求
從理論上講,任何兩種不同導體(或半導體)都可以配制成熱電偶,但是作為實用的測溫元件,其要求是多方面的。為了保證工程技術的可靠性,以及有足夠的測量精度,并不是所有材料都能組成熱電偶,一般對熱電偶的電極材料基本要求是:
(1)在測溫范圍內,熱電性質穩定,不隨時間而變化;有足夠的物理化學穩定性,不易氧化或腐蝕;
(2)電阻溫度系數小,導電率高,比熱小;
(3)測溫中產生熱電勢要大,并且熱電與溫度之間呈線性或接近線性的單值函數關系;
(4)材料復制性好,機械強度高,制造工藝簡單,價格便宜。
1.3 常用熱電偶
(1)鎳鉻- 鎳硅(鎳鋁)熱電偶(K 型)。該熱電偶的正極,為鉻質量分數為10%的鎳鉻合金(KP),負極為硅質量分數為3%的鎳硅合金(KN)。負極親磁,依據此特性,用磁鐵可以很方便地鑒別出熱電偶的正負極。其特點是,使用溫度范圍寬,高溫下性能較穩定,熱電動勢與溫度的關系近似線性,價格便宜,是目前用量最大的一種熱電偶。該熱電偶適于在氧化性及惰性氣氛中連續使用,短期使用溫度為1 200℃,長期使用溫度為1 000℃,采用金屬或合金保護管。
(2)鎳鉻硅- 鎳硅鎂熱電偶(N 型)。該熱電偶是20 世紀70年代,由澳大利亞的Burley 等人首先研制出來的,是一種新型鎳基合金測溫材料。其主要特點是,在1 300℃以下,高溫抗氧化能力強,熱電動勢的長期穩定性及短期熱循環的復現性好,耐核輻照及耐低溫性能也好。在- 200~1 300 ℃范圍內,有全面取代廉價金屬熱電偶與部分替代S 型熱電偶的趨勢。
(3)鉑銠10- 鉑電偶(S 型)。自1885年Le-chatelier 發明鉑銠10- 鉑熱電偶以來,已有120 多年的歷史。該種熱電偶正極的名義成分,為含銠10%的鉑銠合金(代號SP),負極為純鉑(代號SN),特點是,熱電性能穩定,抗氧化強,宜在氧化性、惰性氣氛中連續使用,長期使用溫度為1 400℃,短期使用溫度為1 600℃。
在所有的熱電偶中,其準確等級最高,通常用作標準或作為測量高溫的熱電偶;其使用溫度范圍廣,均質性及互換性好。缺點是,價格昂貴,電極絲直徑很細,機械強度較低;與其他熱電偶相比,其熱電動勢比較小,需配用靈敏高的顯示儀;該種熱電偶不適于在還原性氣氛或含金屬蒸氣的條件下使用,尤其應避免接觸有機物、鐵、硅、H2及CO 等;在真空下只能短期使用。鉑在不太高的溫度下,易發生再結晶及晶粒長大現象,不僅使高溫強度降低,而且容易引起污染,致使熱電性能不穩定。
1.4 補償導線
由熱電偶測溫的原理可知,只有當熱電偶冷端溫度保持不變時,熱電偶才是被測溫度的單值函數。在應用時,熱電偶工作端與冷端距離很近,冷端又暴露于空間,容易受到周圍溫度波動的影響,因而冷端溫度難以保持恒定。
為此,我們將在一定溫度范圍內(包括常溫),把具有與所匹配的熱電偶熱電動勢標稱值相同的一對帶有絕緣層的導線與熱電偶的參考端相連,將其延長到遠離熱源或環境溫度相對恒定的地方,以補償它們與熱電偶連接處的溫度變化所產生的誤差,該種導線我們稱之為補償導線。
其優點如下:
(1)改善熱電偶測溫線路的力學與物理性能。采用多股或小直徑補償導線,可提高線路的擾性,使接線方便,也可以屏蔽外界干擾。
(2)降低測量線路成本。當熱電偶與儀表的距離很遠時,可用補償導線代替貴金屬熱電偶。
(3)補償導線品質的優劣,將直接影響溫度測量與控制的準確度。
把材質與所配用熱電偶絲的化學成分相同的補償導線,稱為延長型補償導線(X);把材質與所配用熱電偶絲的化學成分不同,只能在一定的溫度范圍內與熱電偶的熱電性能一致的補償導線,稱為補償型補償導線(C)。常用補償導線為SC、KC、NC 型。
2 PID 控制簡介
自動控制系統可分為開環控制系統和閉環控制系統。一個控制系統包括控制器、傳感器、變送器、執行機構及輸入輸出接口。控制器的輸出經過輸出接口、執行機構,加到被控系統上;控制系統的被控量,經過傳感器,變送器,通過輸入接口送到控制器。不同的控制系統,其傳感器、變送器、執行機構是不一樣的。比如壓力控制系統,要采用壓力傳感器。電加熱控制系統的傳感器,是溫度傳感器。
2.1 開環控制系統
開環控制系統,是指被控對象的輸出(被控制量)對控制器的輸出沒有影響。在這種控制系統中,不依賴將被控量反送回來以形成任何閉環回路。
2.2 閉環控制系統
閉環控制系統的特點,是系統被控對象的輸出(被控制量)會反送回來影響控制器的輸出,形成一個或多個閉環。閉環控制系統有正反饋和負反饋,若反饋信號與系統給定值信號相反,則稱為負反饋,若極性相同,則稱為正反饋,一般閉環控制系統均采用負反饋,又稱負反饋控制系統。
2.3 PID 控制的原理和特點
PID 控制是控制工程中技術成熟、應用廣泛的一種控制策略,經過長期的工程實踐,已形成了一套完整的控制方法和典型的結構。其不僅適用于數學模型已知的控制系統中,而且對于大多數數學模型難以確定的工業過程也可應用,在眾多工業過程控制中,取得了滿意的應用效果。
(1)PID 的工作基理。由于來自外界的各種擾動不斷產生,要想達到現場控制對象值保持恒定的目的,控制作用就必須不斷地進行。若擾動出現,使得現場控制對象值(以下簡稱被控參數)發生變化,現場檢測元件就會將這種變化采集后,經變送器送至PID 控制器的輸入端,并與其給定值(以下簡稱SP值)進行比較,得到偏差值(以下簡稱e 值),調節器按此偏差,并以我們預先設定的整定參數控制規律,發出控制信號,去改變調節器的開度,使調節器的開度增加或減少,從而使現場控制對象值發生改變,并趨向于給定值(SP 值),以達到控制目的。
如圖2 所示,其實PID 的實質,就是對偏差(e值)進行比例、積分、微分運算,根據運算結果,控制執行部件的過程。
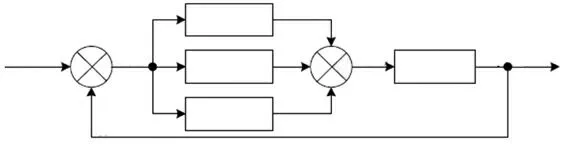
圖2 PID 工作基理圖
(2)比例(P)控制。其能迅速反應誤差,從而減小穩態誤差。但是,比例控制不能消除穩態誤差。比例放大系數的加大,會引起系統的不穩定。
(3)積分(I)控制。其作用是,只要系統有誤差存在,積分控制器就不斷地積累,輸出控制量,以消除誤差。因而,只要有足夠的時間,積分控制將能完全消除誤差,使系統誤差為零,從而消除穩態誤差。但是積分作用太強,會使系統超調加大,甚至使系統出現振蕩。
(4)微分(D)控制。其可以減小超調量,克服振蕩,使系統的穩定性提高,同時加快系統的動態響應速度,減小調整時間,從而改善系統的動態性能。
根據不同的被控對象的控制特性,又可以分為P、PI、PD、PID 等不同的控制模型。
2.4 PID 控制器的參數整定
PID 控制器的參數整定,是控制系統的核心內容。其是根據被控過程的特性,確定PID 控制器的比例系數、積分時間和微分時間的大小。
PID 控制器參數整定的方法很多,概括起來有兩大類:
(1)理論計算整定法。主要是依據系統的數學模型,經過理論計算確定控制器參數。這種方法所得到的計算數據,未必可以直接用,還必須通過工程實際進行調整和修改。
(2)工程整定方法。主要依賴工程經驗,直接在控制系統的試驗中進行,且方法簡單、易于掌握,在實際工程中被廣泛采用。PID 控制器參數的工程整定方法,主要有臨界比例法、反應曲線法和衰減法。這3種方法各有其特點,其共同點都是通過試驗,然后按照工程經驗公式對控制器參數進行整定。但無論采用哪一種方法,所得到的控制器參數,都需要在實際運行中進行最后調整與完善。
3 結束語
PID 控制原理的優點,在于能夠在控制過程中,根據預先設定好的控制規律,不停地自動調節控制量,以使被控系統朝著設定的平衡狀態過渡,最后達到控制范圍精度內的穩定的平衡狀態。根據實際情況確定PID 的各種參數,這項工作可能是費時的,但做好了,將會提高控制器的使用效果,達到較高的控制精度。
[1]王魁漢. 溫度測量實用技術[M]. 北京:機械工業出版社,2007.
[2]姜忠亮,陳秀云,編著.溫度的測量與控制[M].北京:清華大學出版社,2005.
[3]于常光主編.自動控制技術及應用[M].哈爾濱:哈爾濱工業大學出版社,2007.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
