淺析GPS-RTK在水下地形測量中的實際應用
2012-09-08 03:53:08葉慧芳朱偉鋒丁旭華
地球 2012年5期
文/葉慧芳 朱偉鋒 丁旭華
淺析GPS-RTK在水下地形測量中的實際應用
文/葉慧芳 朱偉鋒 丁旭華
隨著科學技術的發展,人們越來越注重水資源開發,水域空間的利用。本文結合工程實例探討GPS-RTK與數字測深儀集成技術在水下地形測量中的原理和作業流程。
水下地形測量 GPS-RTK 測深儀 水下地形測量
1 引言
隨著國民經濟的高速發展,人民物質文化需求的日益增長,交通、水利等基礎設施建設也在飛速發展。近年來我國大規模興建高速公路、鐵路,這就迫切需要水下地形測量提供必要的數據參考。
2 水下地形測量基本原理
2.1 水下地形測量原理
水下地形測量包括兩部分:定位和水深測量。隨著GPS技術的迅速發展,水下地形測量方法取得了很大發展。目前,水下地形測量通常采用GPS獲取平面坐標,測深儀獲取深度數據的基本模式。測深儀得到的水深數據,通過對潮位、測船吃水等參數的改正,得到定位點高程。
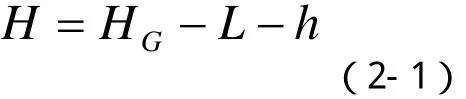
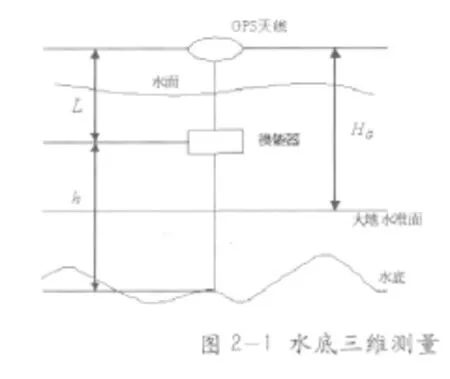
采用免驗潮方法進行水下地形測量,將GPS天線架設在測深儀換能器的垂直上方,高程計算的模型與方法較為簡單。水底三維測量如圖2-1所示,為GPS-RTK測定的高程;L為GPS接收機相位中心至測深儀換能器中心的距離;h為測深儀換能器中心至水底的距離,即測深儀所測得的深度,則水底高程為:
2.2 GPS-RTK基本原理
RTK(Real Time Kinematie)系統由一個基準站、若干個流動站及無線電通訊系統三部分組成。基準站將接收的所有衛星信息(包括偽距和載波相位觀測值)和基準站的信息(如基準站坐標天線高等)通過無線電通訊系統傳遞到流動站,在接收衛星數據的同時也接收了基準站傳遞的衛星數據。在流動站完成初始化后,將接收基準站的信息傳遞到控制器內并將基準站的載波觀測信號與本身接收到的載波觀測信號進行差分處理,即可實時求得移動站的坐標。
2.3 測深儀基本工作原理
測深儀是一種應用測深原理測量水深的儀器。安裝在船上的換能器向水底輻射聲脈沖,水底界面將會產生反射,測定水底反射波到達時間t就可以確定水深。下面以回聲測深儀為例,簡單的介紹一下其原理及功能:船在理想狀態下,用安裝在測量船下的發射換能器,垂直向水下發射一定頻率的聲波脈沖,以聲速C在水中傳播到水底,經反射或折射返回,被接收換能器所接收。由于發射的聲波脈沖有一定的開角,故選定從發射至接收水底回波時間最短的聲波脈沖為中心脈沖,設傳播時間為t,則換能器表面至水底的距離(水深)H為:
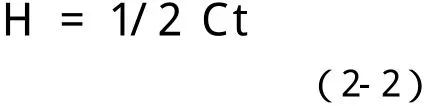
上式中的水中聲速C與水介質的體積彈性模量及密度均有關,而體積彈性模量和密度又是隨溫度、鹽度及靜水壓力變化而變化的。而時間t是儀器測量得到的,一旦聲速C、時間t確定后,即可得到換能器到水底的距離,加上吃水改正即得水深。
由于聲波在傳播的過程中,受水的溫度、鹽份的影響,在不同的時間、地點,聲波的傳播深度均不同,也不可能知道。在實際生產上,通常用一個平均傳播聲速Cm來替代,則:

式中: 和分別表示發射聲波和接收回波的瞬間時刻。
2.4 GPS-RTK與測深儀結合測量系統
RTK的工作原理是將一臺接收機置于基準站上,另一臺或幾臺接收機置于載體(稱為流動站)上,基準站和流動站同時接收同一時間、同一GPS衛星發射的信號,基準站所獲得的觀測值與已知位置信息進行比較,得到GPS差分改正值。然后將這個改正值通過無線電數據鏈電臺及時傳遞給共視衛星的流動站精化其GPS觀測值,從而得到經差分改正后流動站較準確的三維坐標。目前RTK在半徑10 km左右的范圍內平面測量精度一般在2 cm左右,可以采用該技術替代全站儀等設備獲取水下點的平面位置數據,再利用數字測深儀獲取該位置處的水深,則該水下點的高程:
其中為水下地形點高程; 為對應處的水面高程; 為由測深儀獲取的水深。
這樣可以把RTK與數字測深儀組合起來形成一個水下地形測量系統,同時來獲取水下地形點的三維坐標。該系統具體工作原理是:將GPS流動站的天線與測深儀的換能器安置在同一平面位置,同時布置在一條測船上,保證RTK的數據與測深儀數據同步傳輸到PC,作業時流動站根據基準站通過電臺發送的改正數實時改正自身的測量值獲得點位的厘米級精度的平面坐標并實時傳送到PC,同時數字測深儀獲取該平面位置處的水深數據發送到PC,PC根據觀測的水面高程由式2-4即可計算出該平面位置處水下點的高程坐標,與RTK獲得的平面坐標一起組成水下點的三維坐標文件。然后將數據導入數字成圖軟件就可以編輯生成需要的水下地形圖。
3 以玉環漩門灣水下地形測量為例的應用分析
3.1 測區概況
玉環縣位于浙江省東南端,三面環海,涵蓋了5個鄉鎮、43個村,總面積42平方公里。本次測量范圍為水深大于1米的水域部分,面積為20.5平方公里。最深處水深約7米,測區地形自西向東呈淺碟形,東西寬5公里,南北長6.5公里。
3.2 計算坐標轉換參數
采用GPS RTK模式定位。為了保證定位精度,無驗潮測量時,記錄限制設置為“RTK固定解”模式,沿漩門灣周邊布設了5個四等GPS控制點、94個一級GPS控制點以及長達50公里的四等水準網。選擇堅實穩固、地勢高的已知點安置基準站,使用高功率電臺、高增益電線來增大作業半徑。在測區內選取均勻分布的15個一級GPS控制點作為較正點,以有效控制測區。利用最小二乘法求解WGS84坐標系到當地坐標系的轉換參數,選擇殘差小,精度最高的一組參數做為整個測區的啟用參數。
3.3 野外數據采集
水深測量選用上海華測導航技術有限公司生產的D330單頻測深儀測定,該測深儀標稱精度為±1cm±1‰水深。采用“華測X93雙頻GPS接收機+HydroSurvey導航軟件+華測D330單頻數字測深儀”實時采集水下地形點的三維坐標。將測量船上流動站的GPS接收機的數據輸出格式設置為NMEA-0183,以便導航軟實時接收定位數據。
在測量軟件中正確設置換能器的吃水深度、GPS天線中心到到水面距離、聲速、發射脈寬、抑制脈寬等參數。在HydroSurvey導航軟件中正確輸入測區的轉換參數,將GPS有效定位解限制設為RTK固定解。測試導航軟件與測深儀、GPS接收機之間的通信是否正常。使用比對板在不同水深對測深儀的測深數據進行比對,在比對符合要求后,按照計劃線進行數據采集。
3.5 數據處理及成圖
數據處理主要包括定位數據處理,聲速剖面數據處理,潮位數據處理,姿態數據處理,深度數據處理和數據編輯、去噪、合并、清項;成圖層處理是對預處理后得到的水深數據進行網格化,生成數字地形模型(DTM),形成水下地形圖。本次測量使用HydroSurvey對所采集的數據進行水深取樣分析、剔除GPS或測深儀跳變誤差、合并GPS-RTK水面高程與測深數據,形成測圖所需要的水下地形點三維坐標,將三維坐標導入南方CASS7.1數字成圖軟件,自動生成等深線。
4 結語
通過對玉環漩門灣水下地形測量實例的研究,GPS-RTK與數字測深儀相配合進行水下地形數字化測量,不僅加快了作業的速度,而且提高了測量的精度,為水下數字測量乃至測繪領域帶來了一次新的重大革命。同時也促使測繪工作者在外業作業手段、工作方法和數據處理方面必須做相應的改革,隨之引發了的一些新的技術問題亟待解決和進一步探索。
[1] 李征航,黃勁松.GPS測量與數據處理,2005年,第一版.武漢大學出版社,2005.
[2] 汪志明.差分GPS和測深儀組合系統在水下地形測量中的應用研究.武漢大學碩士學位論文,2003.
[3] 趙軍.利用GPS RTK技術進行水下地形測量.城市勘測,2005(6).
[4] 王守彬,王新洲,劉曉東. GPSRTK與數字測深集成技術在水下地形測量中的應用.測繪信息與工程,2004.
(作者:葉慧芳 浙江省測繪大隊;朱偉鋒 浙江華東測繪有限公司;丁旭華浙江省測繪資料檔案館)
猜你喜歡
心理學報(2022年4期)2022-04-12 07:38:02
水泵技術(2021年3期)2021-08-14 02:09:20
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
當代化工研究(2016年9期)2016-03-20 16:22:13
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
西華師范大學學報(自然科學版)(2015年3期)2015-02-27 15:31:22
測繪科學與工程(2013年3期)2013-03-11 15:07:36