基于熱工控制優化的電泵電流波動問題解決方法
2012-09-12 01:55:00張華磊羅志浩
浙江電力 2012年10期
關鍵詞:優化
張華磊,羅志浩
(浙江省電力公司電力科學研究院,杭州 310014)
某發電廠2號機組容量為130 MW,2臺鍋爐給水泵均為電動泵,1臺運行1臺備用。在運行過程中發現,在汽包水位控制投入自動的情況下,2臺給水泵均出現在某些工況下勺管調節性能變差,給水泵電流、給水流量、汽包水位波動大的現象,對機組安全穩定運行構成威脅。曾利用2號機組檢修機會,對給水泵的勺管凸輪裝置進行了機械改造,機組啟動后又分別對2臺給水泵進行了調節性能試驗和負荷變動試驗。試驗結果表明:雖然2臺給水泵電流抖動現象明顯好轉,但2號給水泵在機組負荷約80 MW、勺管開度為65%~70%時,給水泵電流仍有晃動,最大幅度為30 A,影響了2號給水泵的全負荷段正常運行。為解決這一問題,提出了基于熱工控制優化的解決方案,實施后的實際運行表明,效果明顯、措施有效。
1 問題分析
在2號機組的DCS控制系統中,2臺給水泵主要用于三沖量汽包水位控制。正常運行時,給水泵為1臺運行、另1臺備用。通過調節運行給水泵的轉速來控制鍋爐給水量。當機組在啟動或低負荷時,控制系統只根據汽包水位信號進行調節,即單沖量控制;機組在高負荷時,控制系統采用主蒸汽流量、汽包水位加給水流量的三沖量控制。主蒸汽流量為三沖量控制回路主調節器的前饋信號,給水流量為三沖量控制回路副調節器的測量值,控制原理見圖1。
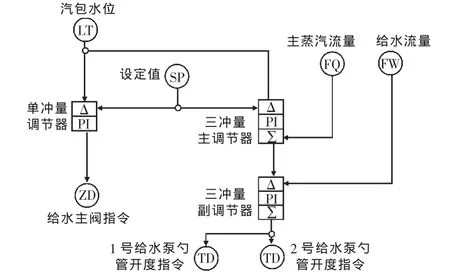
圖1 優化前汽包水位控制原理
機械改造前,通過執行機構的操縱臂帶動勺管凸輪,再由勺管凸輪帶動齒條、齒輪機構來控制勺管位置。改造后,改成由操縱臂直接帶動齒條、齒輪機構來控制勺管位置。改造前后,給水泵勺管的傳動部分有了明顯的改變,也引起了給水泵勺管調節特性的改變,因此機組啟動后對2臺給水泵都進行了調節性能試驗。
1.1 調節性能試驗
機組啟動后,由2號給水泵帶負荷運行,進行調節特性試驗。機組負荷從80 MW升至125 MW,有關特性試驗數據見表1,2號給水泵的調節特性曲線見圖2。
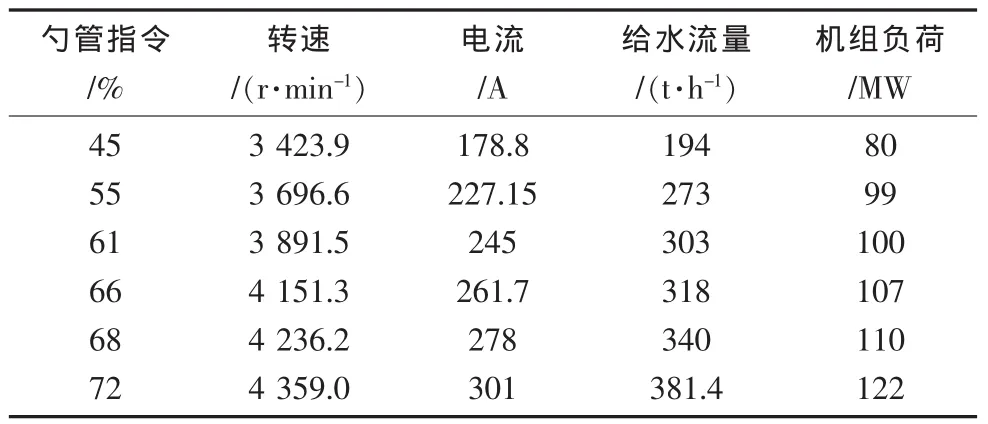
表12號給水泵調節特性試驗數據
從調節特性試驗數據和特性曲線可以看出:2號給水泵經過機械改造后,調節過程總體線性度較好,但勺管開度在65%~70%時曲線較陡,流量變化過快。勺管開度變化5%,泵出口流量變化約60t/h。由給水泵勺管的機械原理可知:給水泵出口流量的大小取決于給水泵的轉速,而轉速取決于勺管的回油量。如果單行程內回油量變化過大、過快,將嚴重影響給水泵出口流量的穩定,相應的就會引起給水泵電流抖動。如果能利用熱工控制優化手段,使給水泵調節特性變得更加平緩,就可以起到平穩給水泵電流和流量的作用。
1.2 系統共振
引起電流抖動的原因有:電流信號受到干擾、電機故障以及系統共振。經過現場排查,前2個原因基本可以排除,主要原因可能是改造后給水泵勺管傳動部分在某種工況下與某些因素產生了共振,從而引起電流抖動。從汽包水位控制角度來說,2號給水泵改造后電流仍出現抖動是在機組負荷80 MW、勺管開度約70%時,此時汽包水位控制系統已處于三沖量水位控制,影響給水泵調節指令的因素有汽包水位、主蒸汽流量和給水流量。這3個信號在機組正常運行過程中會有一定的波動,在PID控制器的作用下,使勺管指令進入機械傳動共振點。因此必須尋找避開共振點的方法,使汽包水位、主蒸汽流量和給水流量對勺管指令的影響更加平緩。
2 控制優化方案
2.1 調節特性控制優化
調節特性控制優化的具體方法是在汽包水位三沖量副調節器出口增加一個函數模塊,目的是使三沖量副調節器送出的給水泵勺管開度指令更加線性化,在勺管開度65%~70%區間內的調節特性曲線更加平緩。控制優化原理見圖3。
其中調節特性優化函數f1(x)的具體參數可以由2號給水泵調節特性試驗數據反推算得出。由于1號給水泵和2號給水泵在機組運行時為一用一備關系,2臺給水泵在汽包三沖量控制回路中采用同一套PID調節器參數,所以2號給水泵調節特性要盡可能與1號給水泵調節特性一致,數據反推算時也要參考1號給水泵的調節特性。進行數據反推算后,得出2號給水泵調節特性優化函數的具體參數(見表2)。
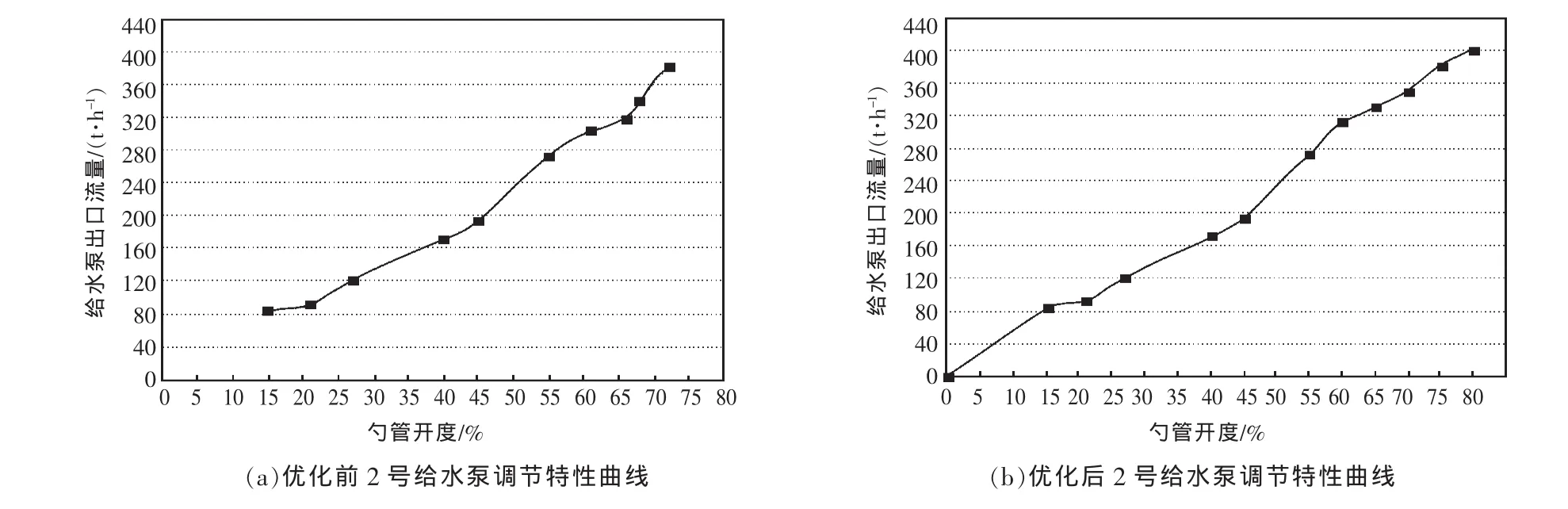
圖2 優化前后2號給水泵調節特性對比曲線
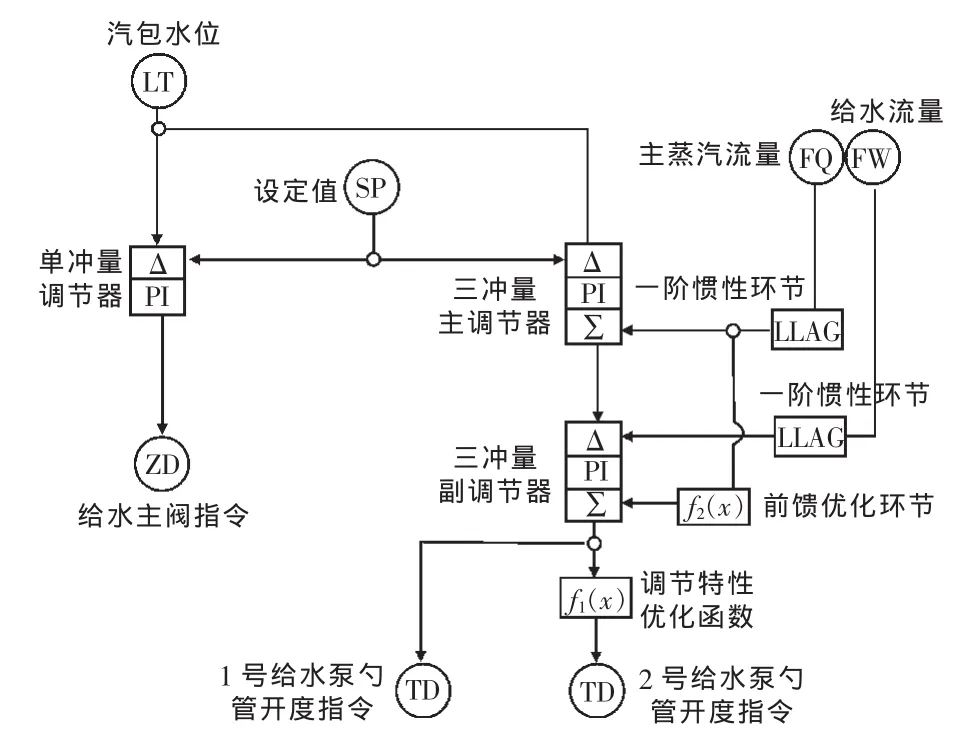
圖3 優化后汽包水位控制原理
調節特性優化后的特性曲線見圖2。
可以看出,在調節特性優化函數的作用下,2號給水泵調節特性曲線變得更加平緩,線性度更好,特別是勺管開度在65%~70%區間時,泵出口流量變化較平緩,有利于穩定給水泵電流。
2.2 三沖量信號優化處理
三沖量信號控制優化的目的是使汽包水位、主蒸汽流量和給水流量信號對勺管指令的影響更加平緩。由于汽包水位在進入控制系統前已經作了濾波防抖動處理,故只需要對主蒸汽流量和給水流量進行處理。如圖3所示,分別在主蒸汽流量和給水流量進入控制回路前增加一階慣性環節LLAG,可起到使信號平緩、防止波動的作用。
主蒸汽流量作為三沖量調節器的前饋環節,對三沖量副調節器的影響比較大。對主蒸汽流量信號采用一階慣性環節處理后,減弱了主蒸汽流量自身波動或突變對副調節器的影響。給水流量在三沖量副調節器中是被調量,流量信號的波動將直接影響調節器的輸出,即給水泵勺管開度指令。對給水流量信號采用一階慣性環節處理,減弱了給水流量信號波動對給水泵勺管開度指令的影響。通過試驗,最終確定2個一階慣性環節的慣性時間參數為3 s。
三沖量副調節器增加前饋優化環節f2(x),前饋優化環節輸入信號為經過一階慣性處理后的主蒸汽流量,反映機組實際負荷。f2(x)為不同負荷下對應的給水泵勺管開度指令函數。三沖量副調節器增加前饋優化環節后,能夠更快更準確地響應機組負荷的變化。
3 實施效果
利用2號機組調停檢修機會,在相應DCS控制回路中實施了上述控制優化方案。經過優化后,2號給水泵調節特性變得更加線性和平緩,三沖量信號也減弱了自身抖動對給水泵勺管開度指令的影響。經過一段時間的運行實踐,2號給水泵投入運行時在機組大幅度升降負荷以及日常運行過程中均未發現給水泵電流、給水流量、汽包水位大幅波動的現象。圖4為相同的負荷變動工況下,2號給水泵在優化方案實施前后的調節效果對比。
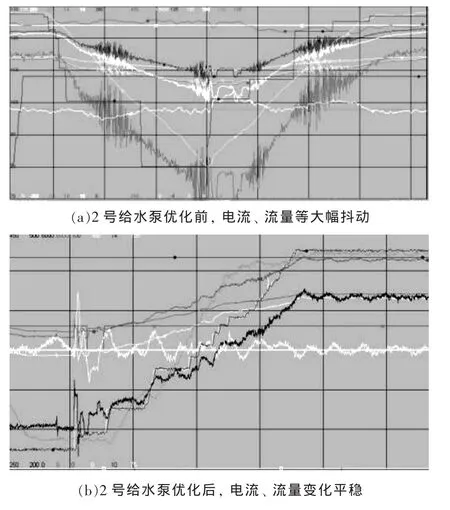
圖42號給水泵優化方案實施前后調節效果對比

表22號給水泵調節特性優化函數參數
4 結語
針對130 MW機組電泵電流抖動問題,提出基于熱工控制優化的解決方法,能夠有效解決機械原因引起的問題。本文提出的基于熱工控制優化的解決方法實施簡單,無需投入過多的人力物力,提高了機組的可靠性,對解決類似問題有一定參考意義。
[1]DL/T 657-2006火力發電廠模擬量控制系統驗收測試規程[S].北京:中國電力出版社,2006.
[2]朱北恒.火電廠熱工自動化系統試驗[M].北京:中國電力出版社,2006.
[3]成福龍.調速給水泵液力耦合器凸輪的功效和特性[J].華東電力,1998(9)∶28-31.
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45