主被動電磁式動力吸振器及其在桁架振動控制中的應用
2012-09-15 08:49:00楊愷,崔龍,黃海
振動與沖擊 2012年18期
楊 愷,崔 龍,黃 海
(北京航空航天大學 宇航學院航天飛行器與導彈技術實驗室,北京 100191)
為減少發射重量,航天器越來越多的采用桁架等輕質柔性結構。這類結構受到干擾容易引發共振現象,使安裝其上的有效載荷不能正常工作,因此針對輕質柔性結構的振動控制受到廣泛關注。國內外學者提出采用在結構中嵌入壓電陶瓷、磁致伸縮材料等主動控制元件實現被控結構振動控制的方法[1-3]。然而對于航天領域運用的盤壓桿、充氣結構等變形式展開結構,難以通過直接嵌入主動控制元件的方法進行振動控制,從而限制了這類結構的應用。
對于這類變形式展開結構的振動控制,采用動力吸振器(DVA,Dynamic Vibration Absorber)是一種有效地解決途徑。DVA由Ormondroyd等[4]提出,其原理是在結構上附加質量彈簧共振系統,通過該系統在共振時產生的反作用力抑制被控結構的振動。由于DVA具有結構簡單,振動控制效果良好的優點,在地面大型結構[5]和航空領域[6]已有應用,國內外也對其振動控制的機理與應用展開了研究,例如:Hugin等[6]提出了一種固有頻率可調的半主動DVA,用于直升機的減震控制;Rudinger[7]對一種采用非線性阻尼的被動 DVA進行了建模研究,通過數值仿真驗證了這種DVA的振動控制效果;孫志卓等[8]設計了一種基于電磁彈簧原理的動力吸振器,通過動態調節吸振器電磁彈簧剛度實現對各頻率的振動抑制,并通過仿真驗證該DVA的控制效果。上述DVA均為被動或固有頻率可調的半主動吸振器,雖然具有控制簡單的優點,但振動控制帶寬和控制效果均有限,從而無法滿足對寬頻振動控制的需求。
為解決航天器輕質柔性結構的寬頻振動控制問題,本文提出了一種主被動電磁式動力吸振器,具有被動和主動兩種控制模式。吸振器工作在被動模式時,無需外部供電,工作在主動模式時,具備寬頻振動控制能力。首先根據電磁式DVA的振動控制原理設計了DVA的結構,并在設計過程中分別對DVA的磁場性質和膜片彈簧進行了有限元分析。隨后對研制的DVA實物進行了性能測試,最后以三棱柱桁架為對象,進行了DVA的主被動振動控制實驗。
1 電磁式DVA振動控制原理
電磁式DVA由永磁鐵、勵磁線圈和彈簧組成。永磁鐵作為動子,與作為定子的線圈通過剛度為kd的彈簧連接。DVA與被控結構構成的DVA振動控制系統如圖1所示。
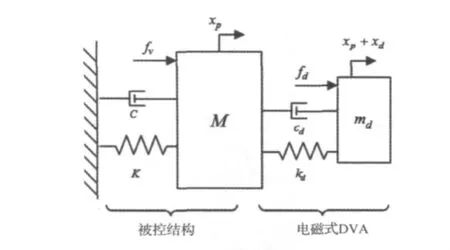
圖1 電磁式DVA振動控制系統的示意圖Fig.1 Vibration control system of electromagnetic DVA
設DVA的動子質量為md,其受到電磁控制力為fd、彈簧回復力為 kdxd、電磁阻尼力為fe,則 DVA的動力學方程為:

式中:xd和xp分別為動子相對定子的運動位移和被控結構的振動位移。
根據電磁感應原理,fd與fe分別滿足:
式中:id為線圈電流,B為永磁鐵在線圈處的磁場強度,L為線圈總長,ki定義為DVA力常數。cd為電磁阻尼系數,其由永磁鐵與定子相對運動形成的電磁渦流效應產生。
DVA工作時對被控結構產生的反作用力P滿足:

則被控結構振動控制方程為:

式中:M,K,C分別為被控結構的質量、剛度和阻尼。fv為被控結構受到的干擾力。由式(4)、式(5)知,通過控制線圈電流id,可實現對被控結構的主動控制;當線圈電流id為0時,DVA工作在被動模式,依靠電磁阻尼cd消耗被控結構的振動能量。根據文獻[4]的分析,當被動DVA的固有頻率與振動頻率一致時,DVA動子振幅最大,相位卻滯后-π/2,被動振動控制效果最好。
為研究被動DVA的振動控制效果,進行了動力學仿真。仿真參數如下:被控結構質量M為1 kg,固有頻率為7 Hz,阻尼C為0.3 Ns/m,受到幅值為1 N的持續干擾力。DVA動子質量 md為0.3 kg,固有頻率為7 Hz,電磁阻尼cd為40 Ns/m。
仿真結果顯示,相比無DVA,被動DVA對固有頻率(7 Hz)附近的振動控制效果最明顯,振幅衰減21 dB,即超過90%,對結構的共振模態有明顯的抑振效果,對非共振模態的振動控制效果不明顯,控制效果有限,需在被動DVA的基礎上增加主動控制,以提高抑振能力。
2 電磁式DVA的設計
2.1 DVA結構
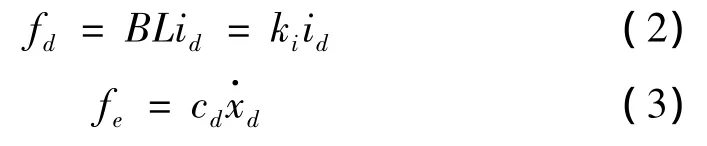
電磁式DVA的結構如圖2所示,該DVA主要由5個部分組成:① 永磁鐵;② 線圈套筒;③ 膜片彈簧;④外殼;⑤ 線圈。永磁鐵1與線圈套筒2沿軸向安裝在外殼4內。其中,套筒2的凹槽內纏繞直徑為0.45 mm的線圈,其內壁與永磁鐵1存在δ=1 mm的間隙。永磁鐵1的兩端分別通過一片膜片彈簧3與外殼4連接,這種安裝方式避免了永磁鐵在運動過程中發生偏移,從而保證永磁鐵始終沿DVA軸向方向運動。當永磁鐵1軸向運動時,引起膜片彈簧3的軸向變形,從而產生彈簧回復力。
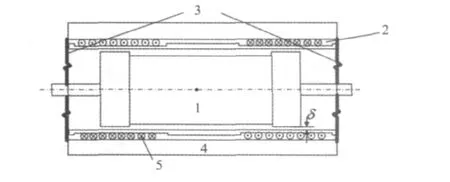
圖2 電磁式DVA結構示意圖Fig.2 Structure of electromagnetic DVA
由電磁式DVA振動控制原理可知,DVA的磁場分布與膜片彈簧是影響DVA控制性能的重要環節,因此需對這兩個環節進行詳細設計。
2.2 DVA磁場設計
由式(2)可知,DVA磁場分布決定了DVA力常數ki,從而決定了DVA主動控制性能。因此,對該結構的DVA磁場進行了有限元分析。其中,永磁鐵模型的材料為釹鐵硼,外殼模型的材料為45鋼,線圈的材料為銅,線圈在線圈套筒的每個凹槽上各纏繞了68圈。
分析結果顯示:永磁鐵產生的磁力線在線圈位置密集分布,磁場強度B介于0.14 T~0.27 T。在該磁場分布下,控制力fd與線圈電流id呈線性關系,DVA力常數ki為1.61 N/A。仿真結果還顯示,由于外殼的軟磁特性,磁力線被完全封閉在DVA內部。上述分析結果表明,該DVA的線圈電流與其控制力呈線性關系,同時其外殼起到了隔磁作用。
2.3 膜片彈簧設計
由DVA的結構可知,膜片彈簧不僅要為DVA提供軸向剛度kd,還需要橫向支撐永磁鐵,防止其在運動過程中出現軸向偏移。為使DVA的共振頻率與輕質柔性結構的共振頻率一致,以達到良好的被動振動控制效果,膜片彈簧的軸向剛度需設計的較低。相反,膜片彈簧的徑向剛度卻需要設計的較高,以橫向支撐永磁鐵。因此,設計了如圖3所示的膜片彈簧,其外徑為50 mm,厚度為0.1 mm。
圖3 膜片彈簧有限元模型Fig.3 Finite element model of the membrane
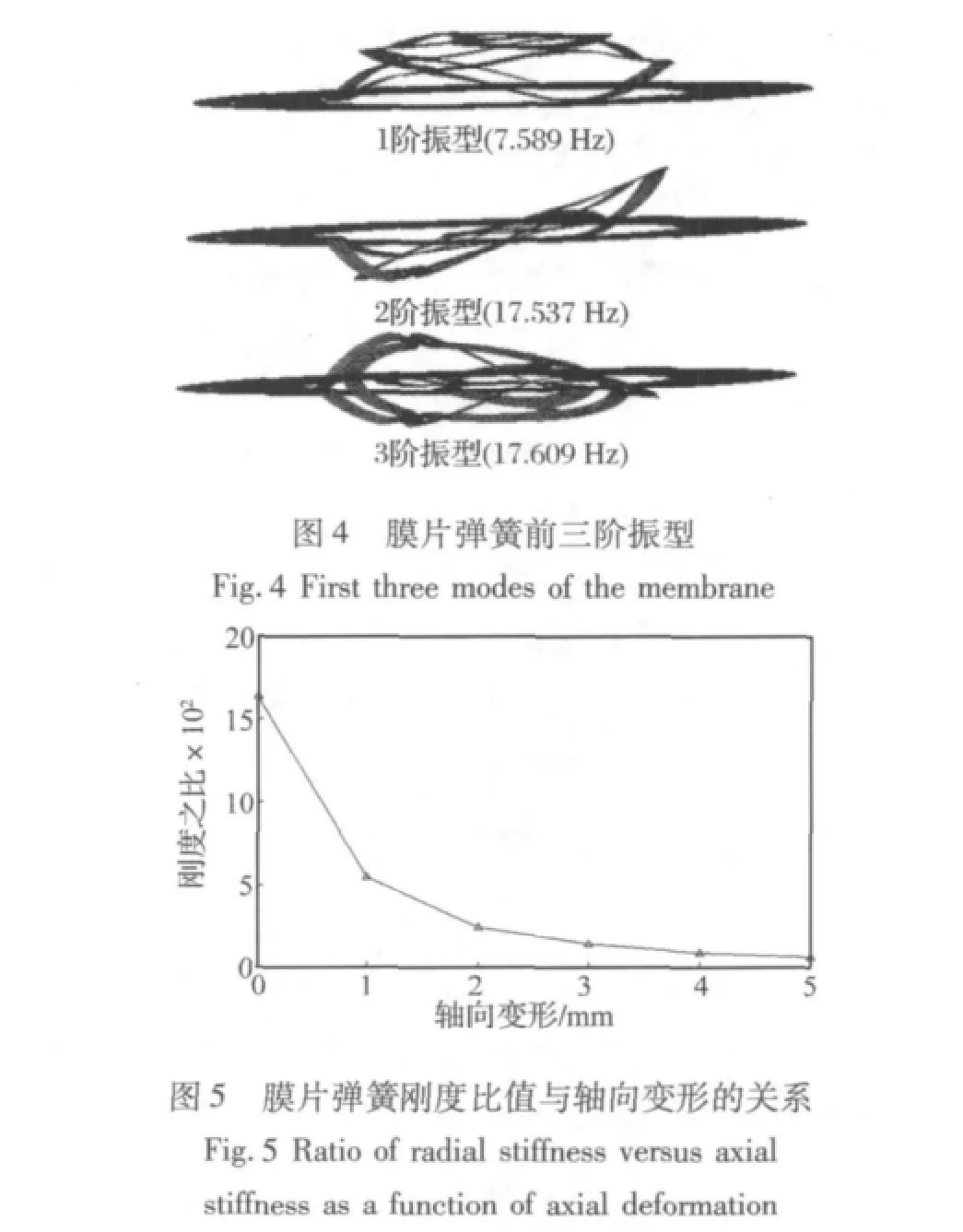
對該膜片彈簧進行了非線性有限元分析,得到了其徑向剛度與軸向剛度的比值,以驗證膜片彈簧形狀的合理性。該膜片彈簧的前三階振動形式如圖4所示。其中,膜片彈簧的材料為304號無磁不銹鋼,在分析過程中固定約束彈簧的邊緣,以1 mm為間隔依次對彈簧中心加載0~5 mm的軸向變形,分別求得每次加載條件下的徑向和軸向剛度。該膜片彈簧徑向剛度與軸向剛度比值隨軸向變形的變化關系如圖5所示。
結果顯示,膜片彈簧一階振型為沿軸向的振動,二、三階分別為繞徑向的彎曲振動。采用兩片膜片彈簧對稱支撐磁鐵,防止磁鐵在運動時發生翻轉。膜片彈簧的徑向剛度與軸向剛度之比隨DVA的軸向變形而減小,當軸向變形為0 mm時,徑向剛度與軸向剛度之比最大,其比值為1 646;當軸向變形為5 mm時,膜片彈簧的幾何非線性變形導致徑向剛度大幅降低,此時徑向剛度與軸向剛度之比最小,比值為61。分析結果表明,該膜片彈簧的徑向剛度比軸向剛度大1個數量級以上,滿足設計要求。
根據上述設計,研制了如圖6所示的主動電磁式DVA原理樣機。該DVA總重量為0.71 kg,最大徑向尺寸為54 mm,軸向最長為120 mm。其采用了永磁鐵為動子,線圈為定子的動鐵式作動方式,更好的利用了永磁鐵的質量,較傳統動圈式作動方式具有質量更輕的優點,同時避免了可動線圈與外殼的摩擦對振動控制的不利影響。
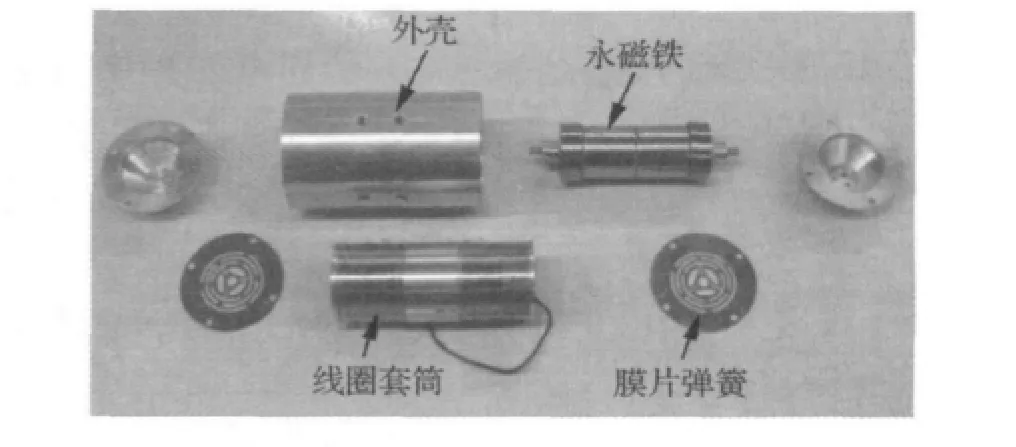
圖6 DVA原理樣機Fig.6 DVA prototype
3 DVA的性能測試
由于主動DVA的振動控制效果由控制力fd和作用力P的性能決定,因此針對圖6所示的DVA原理樣機,進行了上述兩種力的實驗測試。
3.1 DVA控制力fd的性能測試
以0.3 A為間隔,給DVA線圈依次輸入0~1.8 A的恒定電流,通過力傳感器測得DVA輸出的控制力fd。控制fd與線圈電流 id的關系如圖7所示。圖中,方塊為磁場仿真分析得出的控制力曲線,三角形表示實驗中測得的控制力曲線。
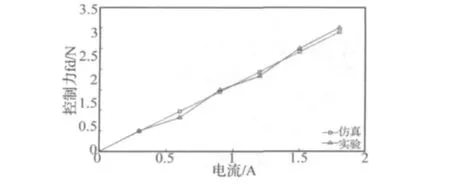
圖7 DVA電流-控制力關系Fig.7 DVA control force as a function of current
結果顯示,fd與id線性相關度為0.997,線性擬合得到的DVA力常數ki為1.67 N/A,與磁場仿真分析所得的結果相差3.6%。該結果說明,fd與id呈高度線性關系,與仿真結果接近,驗證了設計分析的正確性。
3.2 作用力P頻響特性
由式(4)知,作用力P為DVA在控制電流id作用下產生的動態力。因此為得到P與id的動態關系,搭建了如圖8所示的實驗裝置。該實驗裝置由DVA、力傳感器、電阻R和LMS振動分析儀組成。其中,DVA固定在力傳感器的端部,其線圈與電阻R串聯,并與LMS振動分析儀的信號輸出端相連。
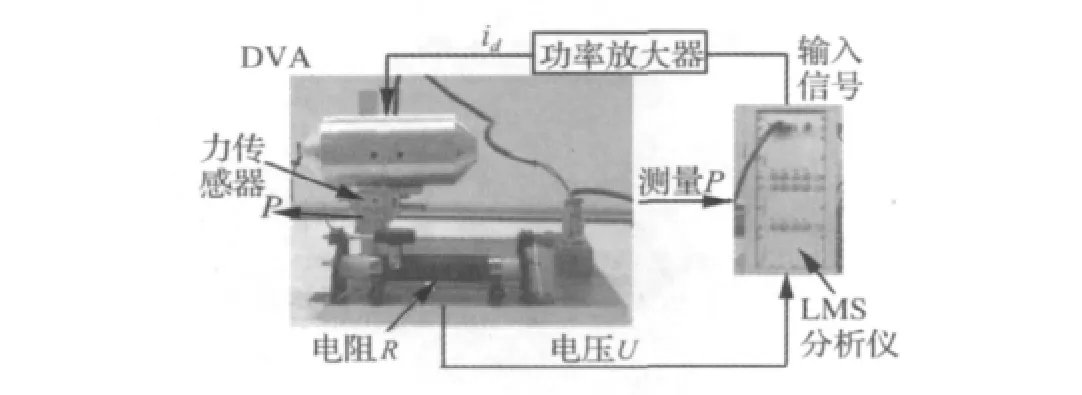
圖8 DVA作用力測試系統Fig.8 Active-force testing system of DVA
實驗過程如下:LMS分析儀向DVA輸出3~20 Hz等幅值控制信號,通過將電阻R兩端的電壓信號U反饋給分析儀,以穩定信號幅值。DVA在控制信號作用下,對力傳感器產生的動態作用力P,力傳感器采集得到P,傳輸給分析儀。由分析儀得到了如圖9所示的P在控制電流id作用下的頻率響應曲線。圖9(a)為作用力P隨在控制電流id作用下的幅頻曲線,圖9(b)為P在id作用下的相頻曲線。

幅頻響應結果顯示,當id的頻率低于7 Hz時,DVA作用力P隨著控制電流id的頻率增加而迅速增大,當頻率超過7 Hz以后,P增幅平緩,逐漸趨于穩定。在實驗過程中,作用力P未出現共振峰值。相頻結果顯示,P與id的相位差隨頻率的增加而減小,在7.4 Hz處穿越90°。測試結果表明,DVA的固有頻率為7.4 Hz,其阻尼比大于1,在被動工作模式下,該DVA針對7.4 Hz附近的振動具有良好的控制效果。
4 DVA-桁架振動控制實驗
為驗證本文設計的DVA主被動振動控制效果,將DVA安裝在一三棱柱桁架結構頂端,構成DVA-桁架振動控制系統,進行了振動控制實驗。
4.1 DVA-桁架振動控制系統
DVA-桁架振動控制系統如圖10所示,系統由三棱柱桁架、壓電作動器、DVA、加速度計、功率放大器和dSPACE1105控制器組成。實驗中采用的三棱柱桁架結構的一階模態頻率為7Hz,振動形式為相對桁架根部的彎曲振動。DVA固定在桁架頂端,其軸向方向沿桁架頂部振動幅度最大的方向。擾源為桁架底部的一根壓電陶瓷,通過dSPACE1105控制器產生持續的信號,驅動壓電陶瓷產生干擾力,以模擬桁架受到的外擾。該實驗的主動振動控制器也采用dSPACE1105實現,通過控制算法計算并輸出控制電壓,再經功率放大器以1.5 A/V的比例轉化為DVA的控制電流。桁架頂端的振動加速度由加速度計測量,經信號調理器雙積分后得到振動位移,然后輸入到dSPACE1105中。
該振動控制實驗的工作原理:桁架底部受到持續的擾動力fv而引起振動,控制器將頂端振動位移xp作為控制器的輸入信號,通過振動控制算法計算并輸出控制電流id,使DVA對桁架產生反作用力P,實現對桁架的振動控制。
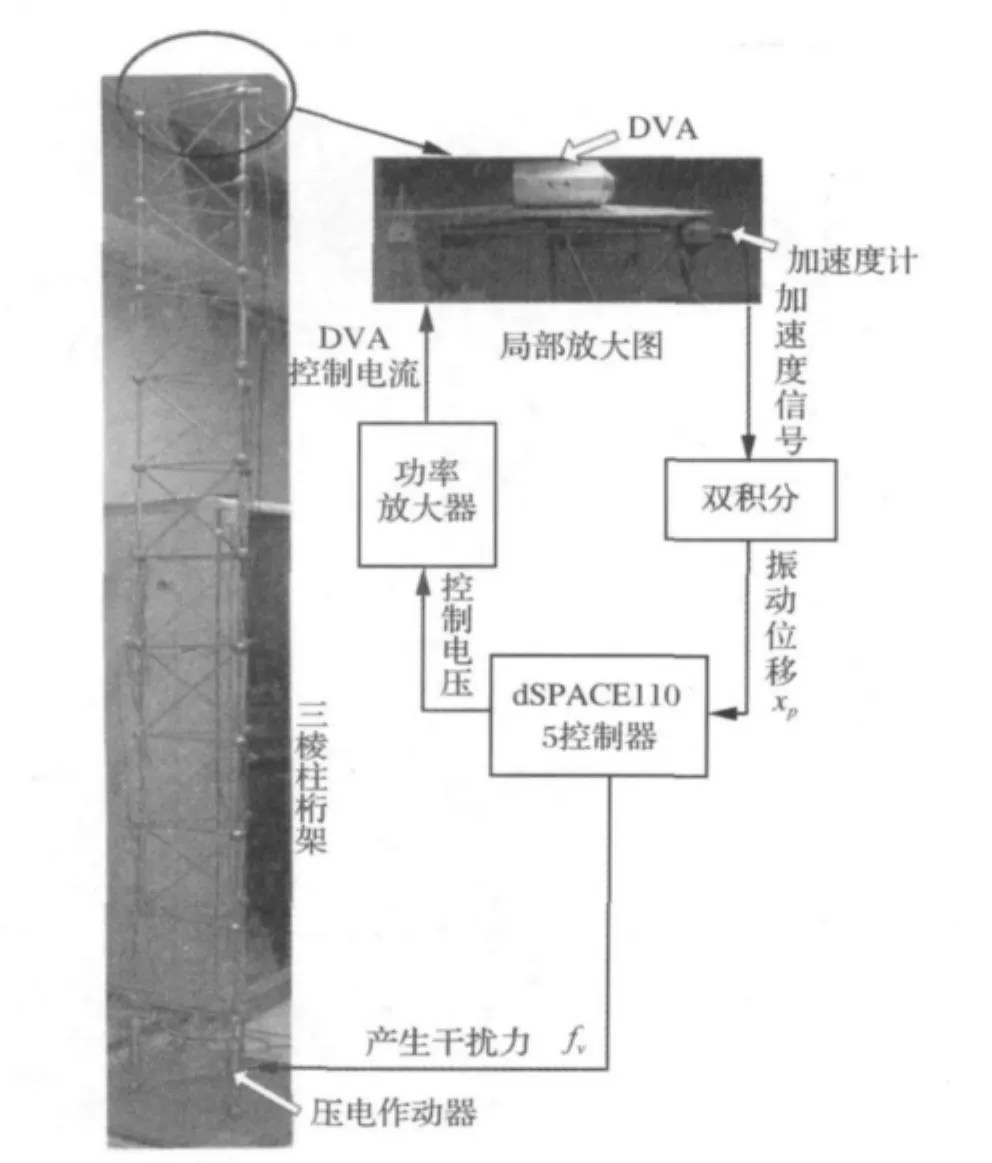
圖10 DVA-桁架振動控制實驗系統Fig.10 DVA-truss vibration control system
本文采用的振動控制算法為Christian提出的ADC(Adaptive Disturbance Canceller)算法[9],該方法將與干擾頻率相同的單位正余弦信號作為基底信號,通過各自乘以自適應調節的比例系數,構造成DVA的控制信號,使DVA對桁架產生與干擾力fv作用相反的作用力P,實現對桁架的振動控制。其控制原理如圖11所示。其中,通過歸一化最小均方根算法(Normalized Least Mean Square,nLMS)[10]實現對比例系數的自適應調節。
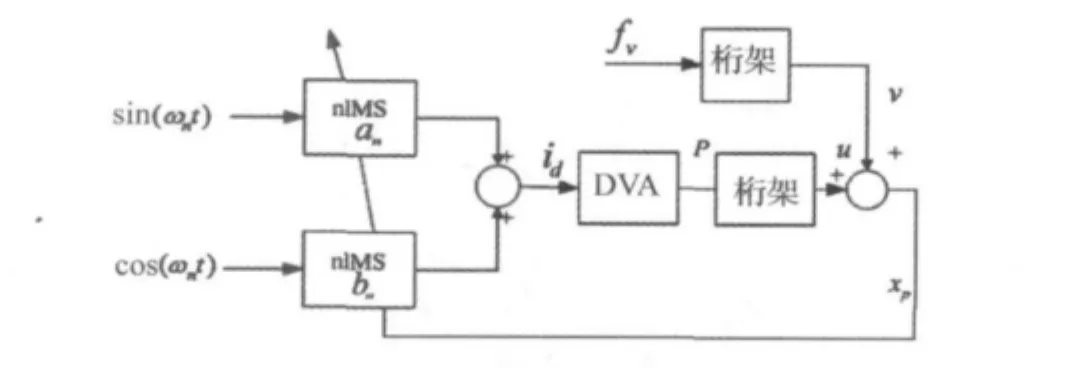
圖11 ADC控制原理圖Fig.11 ADC Schematic diagram

式中,U=[u1,u2]T為 nLMS算法的輸入,即第 n次采樣時刻的基底信號,δ為收斂調整系數。控制電流id產生作用力P,在P的作用下,桁架頂端產生的振動位移為:

式中,α,φ分別為電流id在ωn的頻率處,經過DVA和桁架環節后的增益與相位差。
通過式(7)自適應調整an和bn,改變u的幅值和相位,使u與干擾力激起的振動位移 v的幅值相等,方向相反,從而使xp→0,實現抑制振動。
4.2 控制實驗及結果
本實驗的ADC算法參數設置如下:迭代步長μ=5×10-4,收斂調整系數 δ=1 ×10-10,權系數 an,bn的初值均為0。
首先針對桁架的共振模態(7 Hz)振動進行了控制實驗。前5 s DVA工作在被動模式,第5 s時開啟主動控制。振動控制效果及主動控制電壓如圖12所示。圖12(a)中,實線表示采用DVA進行主被動振動控制時桁架的頂部位移曲線,虛線代表無DVA時桁架的頂部位移曲線。
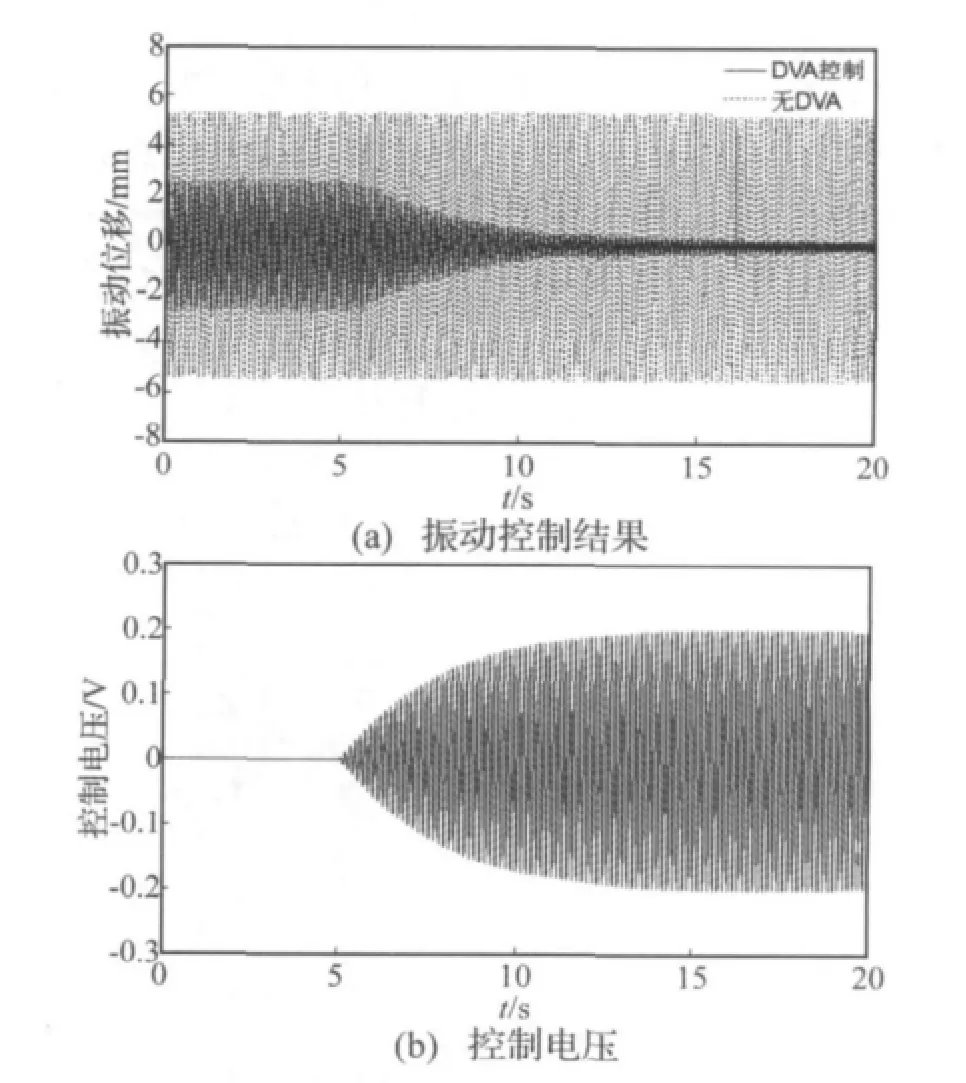
圖12 振動控制結果與控制電壓Fig.12 Vibration control results and Control voltage
結果顯示,DVA工作在被動模式,桁架頂部振動位移xp的振幅由5.41 mm衰減至2.66 mm,衰減幅度為50.83%。開啟主動控制后,振幅進一步衰減,最終衰減為0.2 mm,衰減幅度達96.30%,dSPACE輸出的最大控制電壓為0.2 V。實驗結果表明,主被動DVA對桁架共振模態的振動控制均有顯著的效果,而主動DVA控制效果明顯優于被動DVA。
將干擾力fv的頻率變為10 Hz,以測試DVA對桁架非共振模態振動的控制能力。將對桁架的干擾力幅值增加10倍,使桁架頂部產生明顯的振動。在第5 s開啟主動控制,其振動控制效果如圖13所示。圖中,實線表示有DVA時桁架的頂部位移曲線,虛線表示無DVA時桁架的頂部位移曲線。
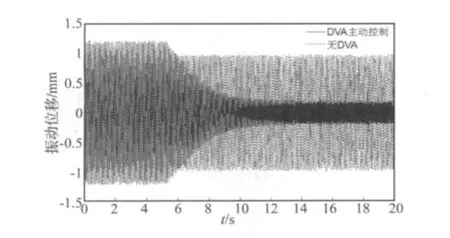
圖13 有無DVA對非共振模態振動的主動控制結果Fig.13 Non-resonant vibration control results with/without DVA
結果顯示,采用DVA的主動控制后,桁架頂部振動位移的幅度在14 s左右由0.97 mm降至0.18 mm衰減達81.40%。實驗結果表明,DVA主動控制針對桁架非共振模態振動依然擁有明顯的控制效果。
5 結論
為解決輕質柔性結構的振動控制問題,本文提出了一種主被動電磁式動力吸振器。通過仿真分析與實驗結果得到了以下結論:
(1)本文設計并研制的主被動電磁式DVA具有零部件少,結構簡單的特點。由性能測試結果可知,DVA的電磁控制力與控制電流呈高度線性關系,主動控制律簡單。該DVA的固有頻率為7.4 Hz,其阻尼比大于1,對7.4 Hz附近的振動具有良好的被動抑振效果。
(2)由對三棱柱桁架振動控制的實驗結果可知,被動DVA對桁架共振模態的振動有50.83%的抑制效果,而采用ADC振動控制算法的主動DVA對結構共振和非共振模態的振動控制效果分別達96.30%和81.40%,抑振效果明顯。
本文研制的主被動電磁式DVA可作為多自由度動力吸振裝置的一個組件,用于抑制柔性結構的多模態振動,在航天振動控制領域將具有廣闊的應用前景。
[1] Chopra I.Review of state of art of smart structures and integrated systems[J].AIAA Journal,2002,40(11):2145-2187.
[2] Hyde T T,Anderson E H.Actuator with built-in viscous damping for isolation and structural control[J]. AIAA Journal,1996,34(1):129-135.
[3] 趙國偉,黃 海,夏人偉.柔性自適應桁架及其振動最優控制實驗[J].北京航空航天大學學報,2005,31(4):434-438.
[4] Ormondroyd J,Hartog D.The theory of the dynamic vibration absorber[J].ASME Journal of Applied Mechanics,1928:A9-A22.
[5] Soong T T,Spencer B F.Supplemental energy dissipation:state-of-the-art and state-of-the-practice[J].Engineer-ing Structures,2002,24:243-259.
[6] Hugin C,Hatch C.Global control of helicopter vibrations using a semi-active vibration control system[A].AIAA.47th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics,and Materials Conference[C].Newport,Rhode Island:AIAA,2006:1860-1867.
[7] Rudinger F.Tuned mass damper with nonlinear viscous damping[J].Journal of Sound and Vibration,2004,300:932-948.
[8] 孫志卓,王全娟,王付山.一種主動電磁式動力吸振器的研究與設計[J].振動與沖擊,2006,25(3):198-201.
[9] Taranti C G R.A computationally efficient algorithm for disturbance cancellation to meet the requirements for optical payloads in satellites[D].California:Naval Postgraduate School,2001.
[10] Farhang-Boroujeny B. Adaptive filters:theory and applications[M].New York:John Wiley& Sons,1998.86-120.
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
艦船科學技術(2022年8期)2022-06-05 07:36:28
哲學評論(2021年2期)2021-08-22 01:53:34
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
中國公路(2017年18期)2018-01-23 03:00:38
數學物理學報(2017年6期)2018-01-22 02:26:40
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
現代企業(2015年9期)2015-02-28 18:56:50
