一類具有常數避難所與收獲率的捕食-食餌模型的穩定性分析
2012-09-18 02:20:12周稻祥朱長榮
重慶理工大學學報(自然科學) 2012年12期
周稻祥,朱長榮
(重慶大學數學與統計學院,重慶 401331)
捕食-食餌模型一直都是生物數學研究的重要領域。近年來,由經典的捕食-食餌模型衍生出很多帶各種新參數的種群模型,因為這些模型更能反映現實世界的真實狀況,因此,引起了人們的廣泛關注[1-119]。在這些模型中,帶食餌避難所的捕食-食餌模型是重要的一種。研究結果指出:避難所在捕食者和食餌相互作用中發揮著穩定性的作用,并且避難所參數對系統的動力行為發揮著重要影響[2-9]。Olivares 和 Jiliberto[2]提出了如下的帶食餌避難率的捕食者-食餌的種群模型:
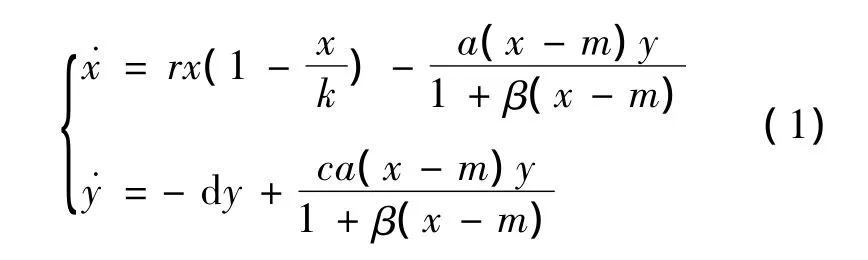
其中:所有參數均非負;x和y分別表示在時間t的食餌和捕食者的種群密度;r表示食餌的內稟增長率;k表示最大環境容量;c表示轉化率;a(xm)y/(1+β(x-m))表示HollingⅡ功能反應函數;d是捕食者的死亡率;m表示食餌避難所。
系統(1)已有很多研究結果[2,6-7]。文獻[2]利用微分方程定性理論的方法指出系統(11)有3個平衡點,內部平衡點是局部漸近穩定的,而且證明了極限環的存在性。文獻[6]通過構造Dulac函數研究了系統(1)的全局穩定性,且用Poincare-Bendixson定理證明了極限環的唯一性。
在生物數學中,考慮到生物鏈的健康性、可持續性以及生物鏈產生的效益,近期有很多學者研究了帶收獲率的生物模型[13-14]。朱天曉[13]考慮了具有線性收獲率的生物模型:

其中h1、h2為捕獲強度。文獻[13]利用微分方程定性理論,給出了系統(2)的平衡點的穩定性條件,通過構造Dulac函數的方法,利用Bendixson-Dulac判定定理,證明了系統(2)不存在極限環。
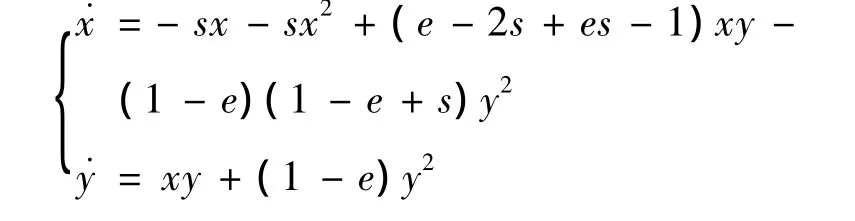
在模型(1)和(2)的基礎上,本文研究帶線性功能反應曲線、常數食餌避難所和線性收獲率的捕食-食餌模型。具體來說,本文考慮以下的捕食-食餌模型:
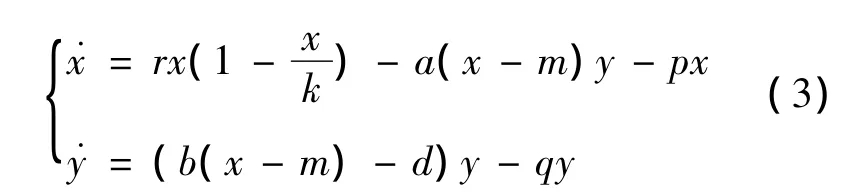
其中:x、y、r、k、d 的生物意義和模型(1)一樣;(x -m)y表示線性功能反應函數;a、b為捕食系數;px、qy表示線性收獲率。
本文討論了系統(3)的全局與局部動力性態。利用Gronwall不等式,證明了系統(3)的解的一致有界性。利用平面系統的動力性質理論,研究了系統(3)的平衡點的類型及穩定性。分析發現:系統在第1象限及其邊界上至多有3個平衡點,其中2個為邊界平衡點,1個為內平衡點。邊界平衡點可以為雙曲鞍點、雙曲結點,也可以為非雙曲的鞍-結點;內平衡點的動力性態較豐富,對不同的參數取值范圍,可以是穩定結點、穩定焦點。證明了內平衡點的全局穩定性。最后進行了數值模擬,模擬結果與理論結果完全吻合。
1 系統解的一致有界性
因為生物系統中的捕食者與食餌的數量都非負,而且系統(3)帶有食餌避難率,因此x>m。實際上,系統(3)在 Ω ={(x,y)|x>m,y >0}中是一致有界的。
定理1 系統(3)在Ω中的解一致有界。
證明 令W=x+ay/b。對方程兩邊關于時間求導,并將式(3)代入,可得
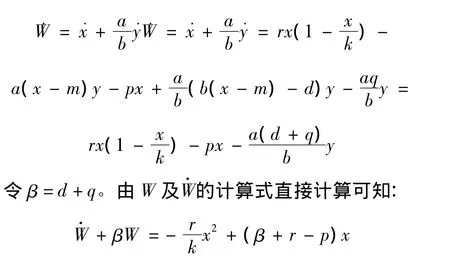
上式右邊是一個開口向下的二次函數,當 x=k(β +r-p)/2r時+βW 達到最大值:
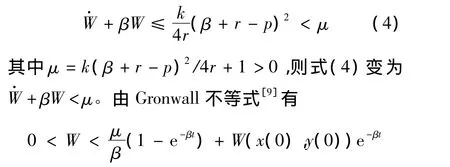
上式中令 t→∞,有0<W <μ/β,即系統(3)的解是一致有界的。
定理1表明,系統(3)中捕食者和食餌的初始種群密度在Ω中,捕食者和食餌的種群密度都降落在Ω的一個有界集內。這表明捕食者和食餌可以在Ω中長期共存。
2 平衡點的動力性態
本節將研究系統(3)的動力性態。很顯然,x軸的正半軸是系統(3)的不變流形,y軸的正半軸不是系統(3)的不變流形,但是在y軸的正半軸上點的向量場是(+,-),所以經過y軸正半軸的軌線,都要從第2象限進入到第1象限。因而,第1象限及其邊界是系統(3)的不變集。下面將在第1象限及其邊界上討論系統(3)的動力性態。

其中 α =r/ρ,β =p/ρ,e= ρ/bm >1,s=r/bk。
平衡點在討論系統的動態行為時起著十分重要的作用,對平衡點的動力行為的研究關系著系統的局部穩定性、全局穩定性等。分2種情況計算系統(5)的平衡點。
1)當y=0時,系統有2個平衡點:A=(0,0)和B=((α -β)/s,0)。注意到 α=β時,A與B 重合,并且捕食者與食餌均非負,因此B存在,當且僅當α>β。所以僅在α>β的條件下討論系統(5)在B處的動力性態。
2)當y≠0時,系統有平衡點C=(x*,y*)=1,(α-β-s)/(e-1())。注意到x*>0,y*>0,且e>1,所以C在第1象限內,當且僅當α>β+s。因此僅在α>β+s的條件下,討論系統(5)在C處的動力性態。
在討論平衡點的動力性態時,平衡點處的雅可比矩陣起著重要作用。令(x0,y0)是系統(5)的平衡點,則系統(5)在平衡點處的雅可比矩陣為

首先討論平衡點A處的動力性態。
定理2 1)當 e>1,s>0,α >β>0時,A為不穩定鞍點;2)當 e>1,s>0,0<α<β時,A為穩定結點;3)當 e>1,s>0,α=β>0時,A為鞍 -結點。
證明 系統(5)在平衡點A處的雅可比矩陣為

所以特征值為:λ(A)1= -1<0,λ(A)2=α-β。
1)當e>1,s>0,α >β>0時,有 λ(A)2>0,則A為不穩定鞍點。
2)當e>1,s>0,0<α <β時,有 λ(A)2<0,則A為穩定結點。
3)當e>1,s>0,α=β>0時,有,在平衡點 A處作變換 x=u-v,y=v,則系統(5)的變為

依照文獻[8]中2.11的定理1知A是鞍-結點。
因為平衡點B存在,當且僅當α>β,在α>β的條件下考慮B點處的動力性態。
定理3 1)當 e>1,s>0,α >s+β 時,B 為不穩定鞍點;2)當 e>1,s>0,β<α <β+s時,B 為穩定結點;3)當 e>1,s>0,α=β+s時,B 為鞍 -結點。
證明 系統(5)在平衡點B處的雅可比矩陣為

所以特征值為:λ(B)1= -(α -β)<0,λ(B)2=(α - β)/s-1。
1)當e>1,s>0,α >s+β 時,有 λ(B)2>0,則B為不穩定鞍點。
2)當e>1,s>0,β <α <β+s時,有 λ(B)2<0,則B為穩定結點。
3)當 e>1,s>0,α =β +s時,λ(B)2=0,且平衡點B=(1,0)。將平衡點 B移到原點,令 x=u+1,y=v,則系統化為

對系統(7)引入變換 u=x+(1-e)y,v=sy,則系統(7)變為
依照文獻[8]中2.11的定理1知B是鞍-結點。
最后,因為C在第1象限內,當且僅當α>β+s,所以在α>β+s的條件下討論系統(5)在C處的動力性態。
定理4 1)當 s>0,β+s<α≤β+s+s2/4,e>1時,C 為穩定結點;2)當 s>0,β+s+s2/4<α時,令e0=(α-β-s)/(2-s)>0,則:① 如果1<e≤e0+1,則C為穩定結點;② 如果e>e0+1,則C是穩定焦點。
證明 系統(5)在平衡點C處的雅可比矩陣為
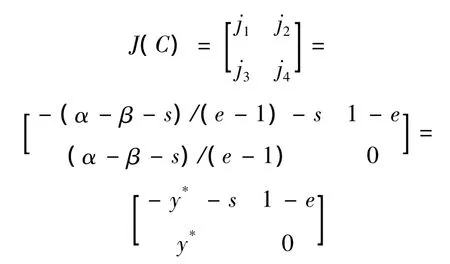
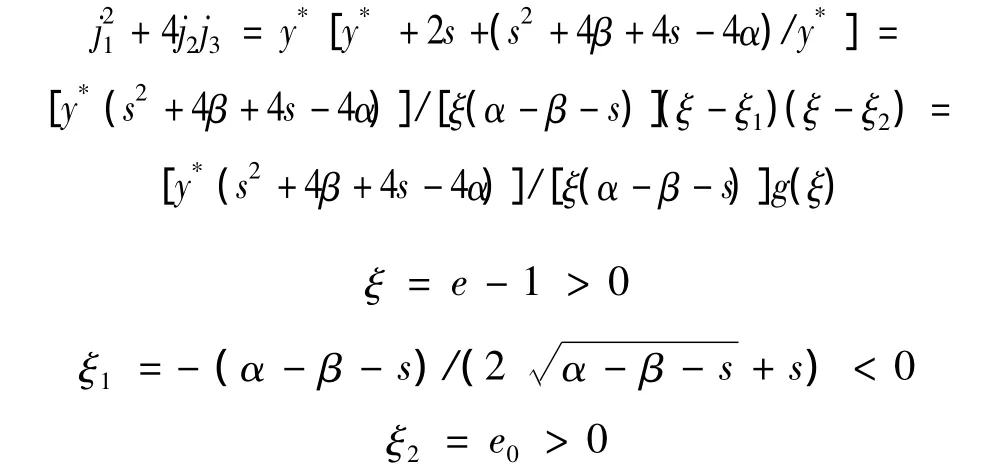
1)當 s>0,β+s<α≤β+s+s2/4,e>1時,+4j2j3≥0,λ(C)1、2為負實數,故 C 為穩定結點。
2)當s>0,β+s+s2/4<α時,注意到ξ>0且+4j2j3和 g(ξ)的符號相同,有下面的結論:① g(ξ)≥0,當且僅當0 <ξ≤ξ2,即1 <e≤e0+1,則λ(C)1、2為負實數,故 C 為穩定結點;② g(ξ)<0,當且僅當 ξ>ξ2,即e>e0+1,則λ(C)1、2為具有負實部的復數,故C是穩定焦點。
從定理4看到,內部平衡點C總是局部漸近穩定的。實際上,還能得到C點的全局穩定性:當s>0,α >β+s,e>1時,平衡點 C 是全局穩定的。這是因為:將平衡點C移到原點,令x=u+x*,y=v+y*,則系統(5)化為
由文獻[4]中定理10.6知平衡點 C是全局穩定的。
3 數值模擬
現在通過數值模擬來驗證理論分析結果。為了模擬此系統,令 α =0.469,β =0.352,e=2.13,s=0.0166,得到系統在平衡點C(1,0.088849)處是漸近穩定的。在初值為(2,0.3)時得到的相圖見圖1。捕食和食餌隨時間的變化見圖2。捕食者和食餌隨時間的變化見圖3、4。
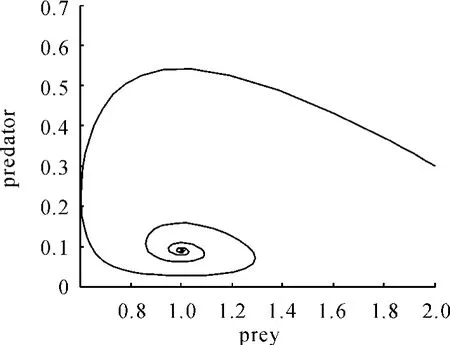
圖1 系統(5)在平衡點C(1,0.088849)處的相圖
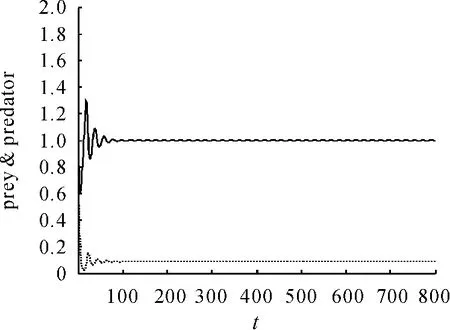
圖2 捕食和食餌隨時間的變化
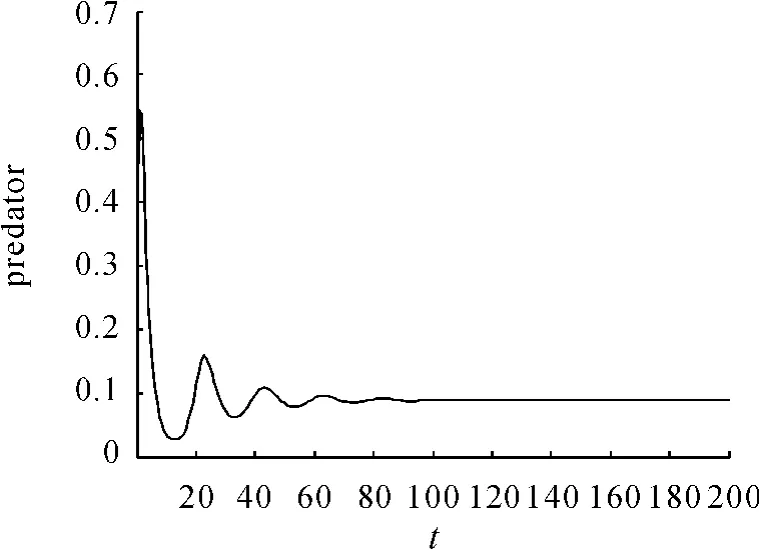
圖3 捕食隨時間的變化
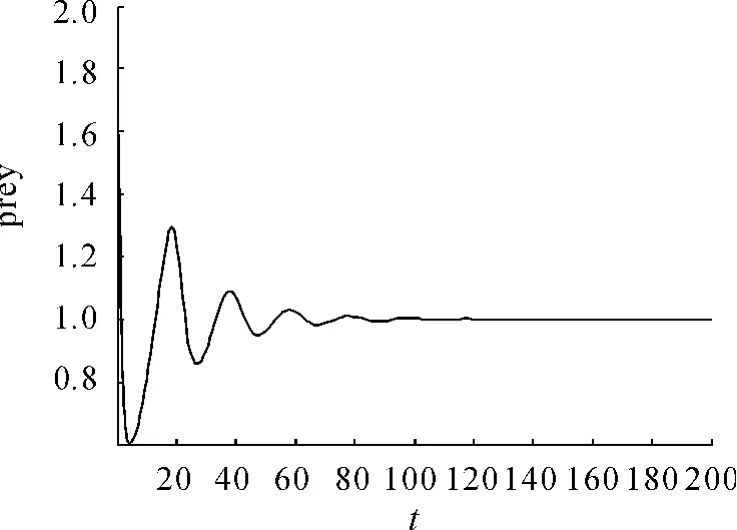
圖4 食隨時間的變化
4 結束語
本文進行了系統解的一致有界性以及平衡點穩定性的定性分析。分析指出增加避難所的數量就可以增加食餌的密度,且穩定性和動態行為受到避難所參數m的影響,內部平衡點C是全局穩定的,即無論開始捕食和食餌的數量是多少,最終將要穩定在一定的數量之內。數值模擬也很好地印證了這些結果。
[1]Birkoff G,Rota G C.Ordinary differential equations[M].Ginn:[s.n.],1982.
[2]González-Olivares E,Ramos-Jiliberto R.Dynamic consequences of prey refuges in a simple model system:More prey,fewer predators and enhanced stability[J].Ecological Modeling,2003,166:135 -146.
[3]Dai G,Tang M.Coexistence region and global dynamics of a harvested predator-prey system[J].SIAM Journal on Applied Mathematics,1998(1):193 -210.
[4]Grank J,Martin H G,Melluish D M.Nonlinear ordinary differential equations[M].USA:[s.n.],1977.
[5]Yuri K.Elements of Applied Bifurcation Theory[M].Second Edition.New York:Springer,1998:79 -100.
[6]Chen L,Chen F.Qualitative analysis of a predator prey model with Holling type II functional response incorporating a constant prey refuge[J].Nonlinear Analysis Real World Applications,2008(10):125 -127.
[7]Ji L L,Wu C Q.Qualitative analysis of a predator-prey model with constant-rate prey harvesting incorporating a constant prey refuge[J].Nonlinear Analysis Real World Applications,2010(11):2285 -2295.
[8]Perko L.Differential Equation and Dynamical Systems[M].Sencond Edition.New York:Spinger,1996:146-152.
[9]Kar T K.Modeling and analysis of a harvested prey-predator system incorporating a prey refuge[J].Journal of Computational and Applied Mathematics,2006,185:19-33.
[10]Kar T K.Stability analysis of a prey-predator model incorporating a prey refuge[J].Communications in Nonlinear Science and Numerical Simulation,2005(10):681-691.
[11]Tao Y D,Wang X,Song X Y.Effect of prey refuge on a harvested predator-prey model with generalized functional response[J].Commun Nonlinear Sci Numer Simulat,2011,16:1052 -1059.
[12]張芷芬,丁同仁,黃文灶,等.微分方程定性理論[M].北京:科學出版社,1985:49-90.
[13]朱天曉.具有線性收獲率的Diekman模型穩定性[J].長春大學學報,2007(3):1-4.
[14]劉娟,李醫民.兩種群都有收獲率的微分生態系統的定性分析[J].徐州師范大學學報,2011(2):32-35.
[15]趙琳,雒志學,王利紅.在容量較小的污染環境中種群的最優捕獲問題[J].重慶理工大學學報:自然科學版,2011,25(2):122 -126.
[16]張靖.食餌具有流行病的捕食-被捕食(SIS)模型的分析[J].四川兵工學報,2011(9):153-156.
[17]張志軍,劉啟寬,李映輝.具有線性收獲率且包含食餌避難所的一類食餌-捕食者模型的定性分析[J].重慶理工大學學報:自然科學版,2011,25(9):104-113.
[18]李盈科,樊小琳,陳亮.帶有非線性傳染率的階段結構捕食食餌模型的持久性[J].四川兵工學報,2011(7):151-154.
[19]劉啟寬,羅廷友,李映輝.一類具功能反應且常數投放的食餌-捕食系統的定性分析[J].重慶理工大學學報:自然科學版,2011,25(3):1118 -122.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
