基于全球定位系統的艦載三坐標雷達動態標校方法
2012-09-20 02:16:12段靜玄鄭劍飛趙復政
中國艦船研究 2012年4期
關鍵詞:系統
段靜玄 鄭劍飛 趙復政 李 蕾
中國艦船研究設計中心,湖北武漢430064
0 引 言
艦載三坐標雷達用于搜索和跟蹤空中目標,是艦載作戰系統防空反導最重要的信息源之一,其主要任務是探測空中目標的方位、距離和仰角這3個參數,作為整個作戰系統的前端,其探測精度直接關系到武器系統的打擊精度,影響著艦艇的作戰效能和生存能力。所以,在艦載作戰系統試驗中,通常需要進行雷達標校,以檢查其探測精度,消除或減小系統誤差。雷達標校一般包括靜態和動態2種:靜態標校法[1]是通過標校站的多個固定觀測點與標校點的光學測量等手段來考核雷達精度,標校站場地選擇困難,技術復雜,且覆蓋的角度范圍較小,難以全面考核;動態標校一般與艦艇航行試驗結合,配合空中目標實施,本艦與目標都處于運動狀態,但由于受儀器本身的限制,傳統的靜態光學標校手段在動態條件下顯得力不從心。在動態標校方法中,可以利用全球定位系統(GPS)差分后處理的標校方法滿足動態條件的要求,但是會增加人工運輸原始數據的保障要求,損失雷達標校的實時性。如果采用廣域差分GPS的標校方法,雖能滿足動態性和實時性的要求,但又常常依賴于外部GPS差分改正信號的質量,且標校精度不及GPS的RTK模式。所以,必須研究一種既能適應動態條件,又能滿足高精度要求的標校方法[2-3]。受李維林等[4]提出的利用GPS測量系統完成艦載導航系統的動態航向對準的啟發,研究了一種基于GPS的艦載三坐標雷達動態標校方法,并進行了系統實現。在系統研制過程中,采用了文獻[5-7]的部分研究成果,并結合艦載三坐標雷達標校工作實際,利用GPS的RTK模式具有精度高、自主性強、動態適應性好的優點,組建了三坐標雷達動態標校系統。該系統提高了標校精度,減少了對外部GPS差分改正數據的依賴,并利用全站儀對系統的標校精度進行了試驗檢查,確保了系統的適用性。
1 利用GPS系統進行雷達標校的一般過程
通過艦載三坐標雷達探測目標獲取目標探測值,通過架設在本艦及目標上的GPS定位系統獲得目標與本艦的位移向量,以GPS定位系統的測量值為真值,通過數理統計得到數據樣本的統計平均和統計標準偏差,進而對雷達測量誤差進行修正。
2 GPS的RTK模式測量原理
近年來,GPS載波相位測量技術得到了長足發展,實時動態定位精度已達到分米級甚至是厘米級,通過坐標轉換和數據修正,即可得到高精度的目標參數值,使得GPS應用于三坐標雷達標校成為可能。
高精度的GPS測量均采用載波相位觀測值,RTK定位技術就是基于載波相位觀測值的實時動態定位技術,它能實時提供被測點在指定坐標系中的三維定位結果,并達到厘米級精度[8]。在RTK作業模式下,基準站通過數據鏈將其觀測值和測站坐標信息一起傳送給流動站。流動站不僅通過數據鏈接收來自基準站的數據,還要采集GPS觀測數據,并在系統內組成差分觀測值進行實時處理,同時給出厘米級的定位結果。流動站可以處于靜止狀態,也可以處于運動狀態;可在固定點上先進行初始化后再進入動態作業,也可在動態條件下直接開機,并在動態環境下完成整周模糊度的搜索求解。在整周未知數解固定后,即可進行每個歷元的實時處理,只要能保持4顆以上衛星相位觀測值的跟蹤和必要的幾何圖形,流動站便可隨時給出厘米級定位結果。RTK技術的關鍵在于數據處理技術和數據傳輸技術,RTK定位時,要求基準站接收機能實時地將觀測數據及已知數據傳輸給流動站接收機,一般都要求9 600的波特率。當前,國際上普遍采用UHF電臺播發差分信號,其頻率范圍為450~470 MHz。根據電磁波理論,它的傳輸屬于一種視距傳輸(準光學通視),其最大傳輸距離由接收天線的高度、地球曲率半徑以及大氣折射等因素決定。在沙漠、戈壁、平原、海域等地區,正常通信距離可達20 km以上。
3 基于RTK模式的艦載三坐標雷達標校方法
3.1 系統組成和原理
根據三坐標雷達標校的具體情況,本文設計的RTK標校系統由基站、A移動站、B移動站組成。如圖1所示,其中基站架設在岸基高處,A移動站架設在本艦雷達三坐標雷達中心,B移動站架設在目標等效反射面中心。A移動站和B移動站通過電臺接收基站電臺發送的RTCM差分改正數據,B移動站輸出的定位、時間信息通過電臺在另一頻段發往數據處理系統,位于本艦的數據處理系統同時接收A移動站和B移動站的定位數據和時間信息,并實時解算目標相對于本艦的方位、距離和仰角等數據。
由于GPS的坐標系統采用的是WGS-84大地坐標,使用時需要將2個GPS的(Φ,λ,h)坐標值轉換到2個GPS的相對位移向量,即相對方位、仰角和距離。轉換的方法很多,本文將僅介紹比較常用的一種。首先將GPS的大地坐標系轉換為直角坐標系(二者都基于同一個橢球模型),計算出空間距離真值,然后再通過向量計算將直角坐標系轉換為以本艦為原點的站心坐標系,求得方位和仰角真值。
3.2 大地坐標系(Φ,λ,h)轉換為直角坐標系(x,y,z)
A移動站和B移動站的GPS輸出的定位數據為緯經高(Φ,λ,h)數據,在計算空間距離時,需要轉化為地心地固直角坐標系(x,y,z),兩個坐標系都基于WGS-84橢球[9]。其轉換公式為:
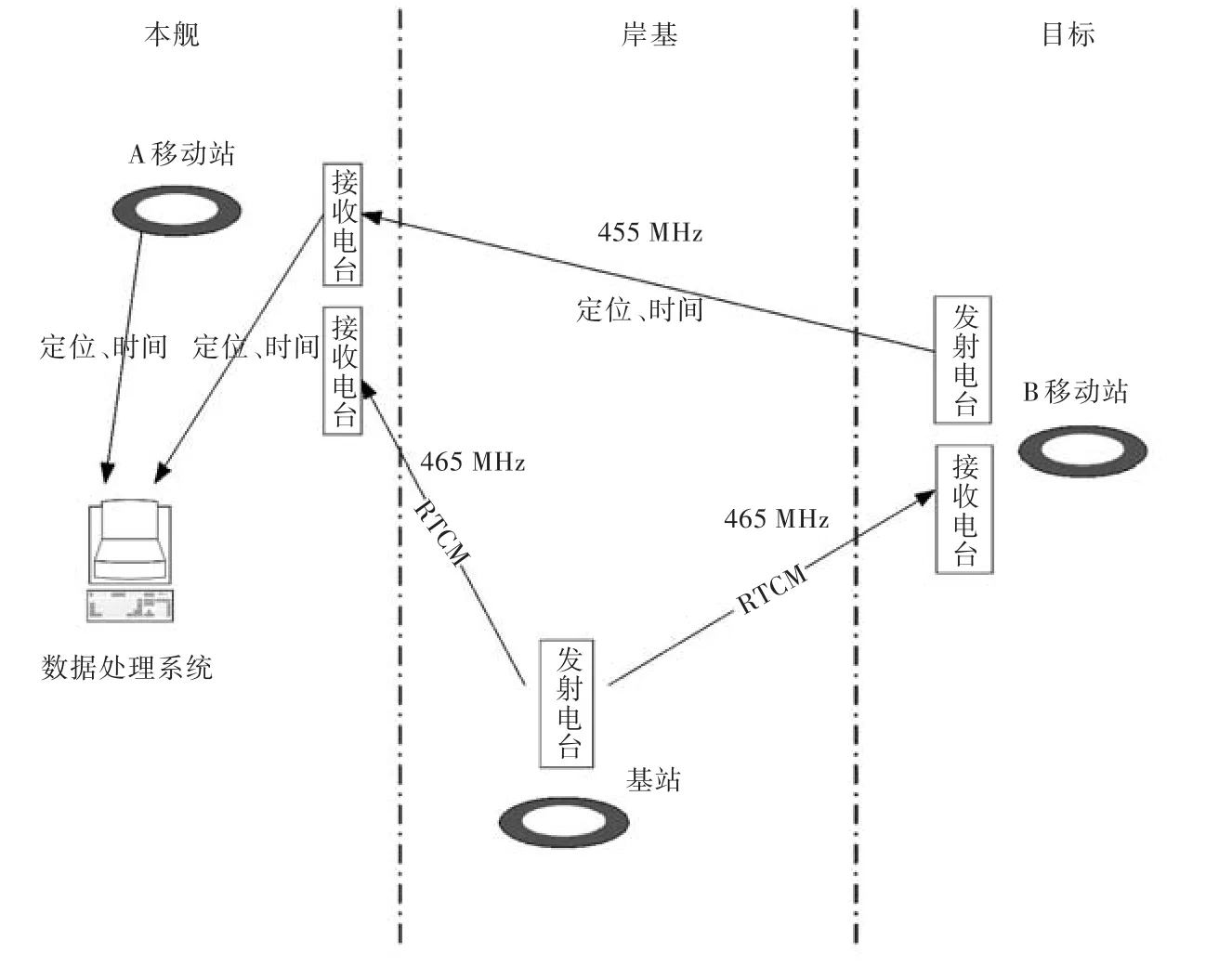
圖1 標校系統的原理和組成Fig.1 Calibration principle and system architecture
其中,基準橢球長半徑a=6 378 137m,基準橢球極扁率 f=1/298.257 223 563,偏心率e2=f(2-f),卯酉圓曲率半徑N為:
根據轉換后的本艦和目標在地心地固直角坐標系的坐標(x1,y1,z1)和(x2,y2,z2),可以很容易地計算得到兩點的空間距離真值L:
3.3 直角坐標系(x,y,z)轉換為站心坐標系(ENU)
直角坐標系的原點位于協議橢球的中心,而艦艇一般位于地球表面上的一點,所以采用以艦艇位置為坐標原點的坐標系更便于表達。站心坐標系通常以用戶所在位置點為坐標原點,3個坐標軸分別指向相互垂直的東向、北向和天向,故又稱作東北天坐標系(ENU)。站心坐標系的天向與WGS-84坐標系在此點的高度方向一致,即橢球體上穿過該點的法線方向。站心坐標系固定在地球上,是地球坐標系的一種。本文將通過利用站心坐標系來計算目標在本艦處的觀測矢量中的方位和仰角。如圖2所示,當在本艦P處觀察目標S時,其連線與水平面的夾角θ即為目標的仰角,其連線在水平面的投影與真北的夾角α即為目標的方位。
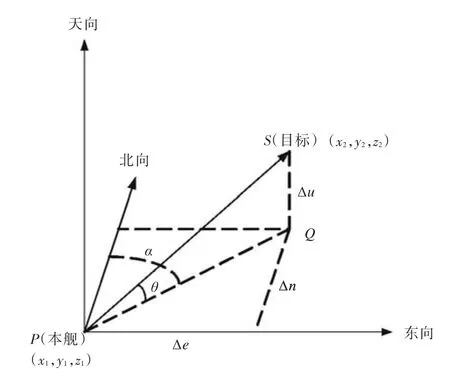
圖2 站心坐標系Fig.2 The ENU coordinate system
P到S的觀測向量為:
觀測向量[ΔxΔyΔz]T可等效地表達在以P點為原點的站心坐標系中的向量[ΔeΔnΔu]T內,其變換關系為:
變換矩陣K為:
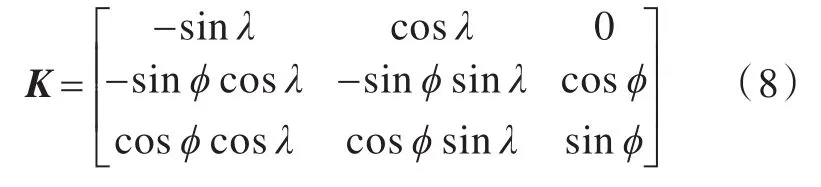
式中,Φ、λ、h分別為大地坐標系中的緯度、經度和高度數據。
有了在本艦位置P的觀測向量[ΔeΔnΔu]T,便可直接計算目標S點相對于本艦的方位與仰角。
3.4 真值與測量值比對的時空同步方法
在動態條件下進行三坐標雷達的標校,目標位置參數隨時間變化,必須考慮真值和雷達測量值之間的時間對齊問題。
在現役艦艇中,艦載的各種武器裝備一般都采用了高精度的時間統一設備,雷達在輸出航跡信息時帶有時間信息。同時,GPS的A移動站和B移動站在輸出定位信息時也會輸出時間信息,兩個移動站都選擇GPS時間作為統一的時間基準。
數據率不同也會影響時間的對齊,本文所涉及的GPS定位數據輸出頻率有1,10 Hz兩種,而三坐標雷達在不同模式下分別有1,2,4 Hz等不同的數據率。當收到的GPS定位數據與收到的雷達探測航跡時間不精確一致時,就會導致時間不對齊的問題。在目標運動的情況下,時間不精確對齊就會影響標校的精度。因為任何運動物體都有保持原運動規律的趨勢,所以,本文采用線性插值算法對比較時間進行對齊[10]。
4 基于動態標校方法的工程實現及精度分析
按照前述方案,本文采用3臺Septentrio雙頻GPS和5臺PDL電臺組建自主RTK標校系統,并編制了數據處理軟件。將其中一臺Septentrio GPS設置為基準站,另外兩臺分別設置為A移動站和B移動站,基準站通過電臺向兩臺移動站發送差分改正數據。兩臺移動站收到改正數據后,在接收機內部進行差分處理,然后向外發送GPS定位數據。數據處理軟件實時接收兩移動站差分后的定位數據,并解算為方位、距離和仰角數據。數據處理軟件界面如圖3所示。
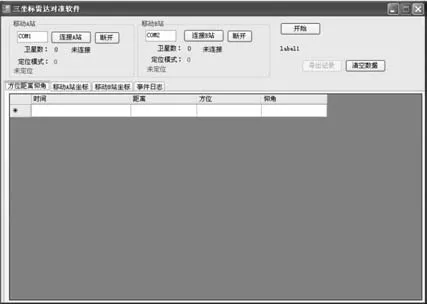
圖3 三坐標雷達標校軟件界面Fig.3 An interface of the three-dimensional radar calibration software
數據處理軟件通過2個串行接口實時接收A移動站和B移動站的定位數據,以及UTC時間信息。由于位于目標上的B移動站需要通過電臺遠距離傳輸數據和信息到本艦數據處理計算機上,可能會存在數據延時和丟幀現象,所以在數據處理上,需要利用B移動站的時間信息來尋找A移動站上對應的定位數據,再進行相應的解算。數據處理軟件還可以查看兩個被測點的衛星情況和定位模式信息。
為了檢查RTK標校系統的測量精度,本文將根據大地測量成果建立方位基準,通過高精度全站儀測得兩移動站的相對距離、方位和仰角數據。以全站儀所測量的方位、距離和仰角為標準值,比較RTK標校系統相對位移向量的測量精度。實際測量基線長約1 km,RTK標校系統與全站儀測得的方位、距離和仰角差值如表1所示。從本文采用的計算方法可以看出,GPS的定位精度直接影響著兩移動站的相對距離、方位和仰角精度。在兩移動站定位精度給定的情況下,距離越遠,標校系統的方位、仰角精度就越高。
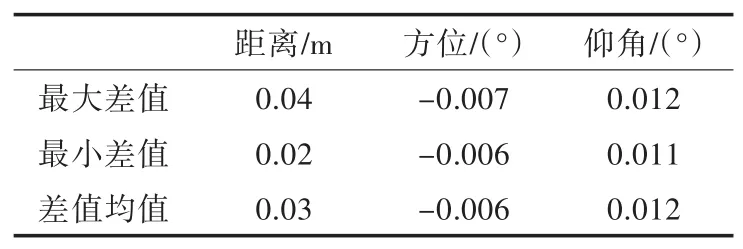
表1 RTK標校系統與萊卡1201全站儀數據差值Tab.1 Statistic errorsbetween RTK calibration system and Leica 1201 total station
本文所使用的全站儀在1 km的距離內誤差不超過5mm,角度測量精度—測回中誤差不超過1″。從表1的比對數據可以看出,RTK標校系統的距離誤差在4 cm以內,角度誤差在0.013°以內,滿足三坐標雷達標校任務的需要。
5 結 語
本文針對艦載三坐標雷達標校的實際需求,提出了一種新的艦載三坐標雷達標校方法,將成熟的GPS定位技術、無線電傳輸和計算機技術有機結合,通過系統集成、坐標變換及時空統一來完成雷達標校。同時,本文設計并實現了三坐標雷達標校系統并對系統精度進行了試驗檢查。精度試驗表明,由于采用了GPS的RTK模式,該系統的距離標校誤差不大于4 cm。本文的研究成果不但適用于三坐標雷達標校要求,也可覆蓋普通的兩坐標雷達的標校需要,為艦載雷達標校提供了一種新的選擇。隨著艦載雷達標校精度和對環境要求的不斷提高,這種基于GPS的RTK模式的艦載雷達動態標校方法和技術在未來的實際應用中將發揮重要作用。
[1]劉高峰,劉健.基于GPS定位系統的艦船雷達標校系統研究[J].艦船科學技術,2006,28(6):100-102,114.
LIU G F,LIU J.Research on shipborne radar calibration system based on GPS positioning system[J].Ship Science and Technology,2006,28(6):100-102,114.
[2]陳相麟,蔣譜成,蔣壽庭,等.雷達試驗[M].北京:國防工業出版社,2004.
[3]陸林根,張志英,常永生,等.防空導彈武器系統制導站系統工程[M].北京:宇航出版社,1996.
[4]李維林,李蕾,唐偉方.基于GPS測量系統的艦載作戰系統動態航向對準技術研究[J].中國艦船研究,2009,4(4):68-71.
LIW L,LI L,TANGW F.Dynamic course alignment on ship-board combat system based on GPSmeasure system[J].Chinese Journal of Ship Research.2009,4(4):68-71.
[5]姚景順,楊世興.艦載雷達的動態標校[J].火力與指揮控制,2008,33(3):128-129.
YAO J S,YANG S X.Dynamic precision adjusting shipboard radar[J].Fire Control and Command Control,2008,33(3):128-129.
[6]趙馨,王世峰,佟首峰,等.艦載雷達零位標校方法[J].現代防御技術,2009,37(2):119-120.
ZHAO X,WANG SF,TONG SF,etal.Method on zero position calibration of shipborne radar[J].Modern Defence Technology,2009,37(2):119-120.
[7]李興民,朱家移,趙賢超.戰術導彈火控雷達零位標校方法研究[J].戰術導彈技術,2004,3(1):55-58.
LIX M,ZHU JY,ZHAO X C.Research on zero position calibration method of fire control radar of tactical missile[J].Tactical Missile Technology,2004,3(1):55-58.
[8]謝鋼.GPS原理與接收機設計[M].北京:電子工業出版社,2009:157-158.
[9]徐紹銓,張華海,楊志強,等.GPS測量原理及應用[M].武漢:武漢大學出版社,2001:79-89.
[10]沙定國.實用誤差理論與數據處理[M].北京:北京理工大學出版社,1993.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32