行波法在電氣化鐵道牽引網故障測距中的應用
2012-09-21 11:26:14韋國
電氣化鐵道 2012年2期
關鍵詞:故障
韋 國
0 引言
電氣化鐵道牽引供電系統是電力系統中具有一定獨立性和特殊性的供電系統。牽引網要承擔一般輸電線沿鐵道傳輸電能的任務及機車用戶頻繁操作而產生強大的電與機械的沖擊,因此常發生牽引網故障,故障頻繁且無備用,嚴重影響電氣化鐵道安全可靠運行。牽引網故障的精確定位一直是影響電氣化鐵道安全可靠供電的重要因素,也是影響電氣化鐵道實際運能的因素之一。特別是對于國內正在興起的高速鐵路,牽引網故障的快速精確定位對縮短搶修時間、加快線路恢復,提高鐵路運輸效率,減少因線路故障停電造成的經濟損失將具有直接的影響。
目前,國內的牽引網故障測距一般采用傳統的阻抗測距技術。受過渡電阻以及牽引網復雜線路結構等因素的影響,要保證良好而穩定的測距精度將是十分困難的[1]。近年來隨著電子技術和計算機技術的發展以及小波分析等數學工具在故障信息分析和檢測領域的應用逐漸成熟,利用故障的高頻暫態信息中的行波進行故障測距的方法在電力系統中得到了廣泛的應用,并且已經有廠家推出了基于行波法和小波分析的測距產品。由于行波在線路中有比較穩定的傳播速度,且測量到的故障行波到達時間差不受線路類型、故障電阻及系統運行參數的影響。因而,可利用行波故障測距法實現牽引網的故障定位。
1 牽引供電系統的基本結構
國內電氣化鐵道采用的是工頻單相 25 kV交流制[2]。牽引供電系統主要包括牽引變電所、牽引網和電力機車。如圖1所示,除了饋電線、接觸網、回流線以及軌道等一般結構之外,牽引網還有其特殊的線路結構,例如小型車站分段線、錨段等,這些特殊的線路結構都會對行波的傳播產生一定的影響。牽引網的供電方式可分為直接供電、BT供電和AT供電方式。國內電氣化鐵道牽引供電系統多采用直接供電加回流線的供電方式(DN方式)。
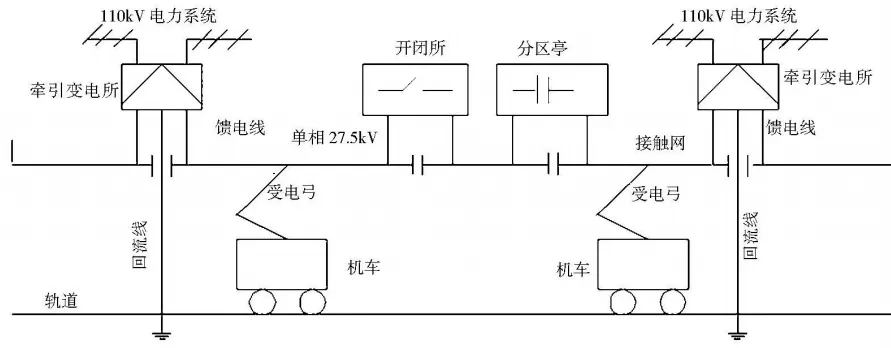
圖1 牽引供電系統供電示意圖
2 行波測距理論
電力系統的高壓傳輸線和電氣化鐵道中的牽引網的作用都是傳輸電能,實際的輸電線路一般可以看作是均勻分布參數電路,由于存在著分布電感和分布電容,當線路上有故障發生時,故障點會產生向線路兩端傳播的行波。如果在傳輸過程中輸電線的參數和波阻抗發生變化,那么行波就將發生反射和折射現象。行波法就是利用波在故障點與母線以及其他波阻抗之間的傳播(發生反射和折射現象)來實現對故障點的快速精確測距。
早期的行波法測距裝置根據實現方法的不同可以分為3種類型[4]。
(1)A型裝置是利用線路故障時在測量端感受到的第 1個正向行波浪涌與其在故障點反射波之間的時延計算測量點到故障點之間的距離。如圖2 a所示,假定m端為測量端。當線路mn內部F點發生故障時,由故障點電壓突變而產生的暫態行波將以速度v(接近光速,具體取決于線路分布參數)從故障點向線路兩端傳播。
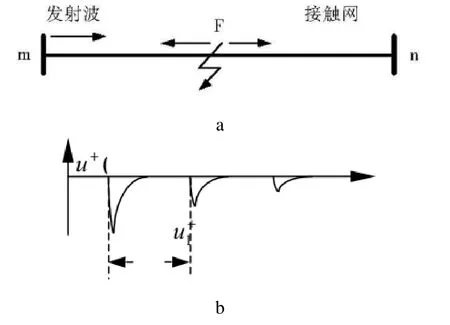
圖2 單端行波故障測距原理示意圖
設行波從母線到故障點的傳播方向為正方向,則故障初始行波浪涌到達測量端時形成本端第 1個反向行波浪涌。該行波浪涌在母線的反射波形成本端第 1個正向行波浪涌,它將向故障點方向傳播。正向行波浪涌在故障點的反射波返回測量端時表現為反向行波浪涌。假定不考慮對端母線反射波的影響,線路故障時在測量端感受到的第1個正向電壓或電流行波浪涌與其在故障點反射波之間的時延Δt,如圖2 b所示。它顯然等于故障暫態行波在測量點與故障點之間往返一次的傳播時間,因而測量點到故障點之間的距離可以表示為DF=vΔt/2。設計該型測距裝置的關鍵在于識別反射波是來源于故障點還是對端母線。該裝置適用于單端供電的線路[1]。
(2)B型裝置是利用故障點產生的行波到達線路兩端的時間,借助于兩端的通信實現測距,由于不需要識別行波的性質,因此實現起來困難較小。當F點發生故障后,將產生向兩端母線m和n傳播的行波(如圖2所示,其中箭頭方向為行波傳播的方向),母線m和n處的行波測距裝置記錄下行波波頭信號到達的時刻,然后利用公式DF=[v(tm-tn)+l]/2即可得到故障點距兩端的距離,其中,l為線路總長,v為波速。該裝置適用于雙端供電的線路。
(3)C型裝置是利用特定的裝置在故障發生后發射高壓高頻或直流脈沖信號,根據脈沖在裝置和故障點間往返的時間進行測距。由于該類型的裝置需要附加專用設備,并且利用電力線載波通信,根據電氣化鐵道的特點,該類裝置在其牽引供電系統中不適用。
以上3種類型中,A型、C型為單端測距;B型為雙端測距,需要有兩端通信。A型和B型裝置對輸電線路的瞬時性和永久性故障均有較好的適應性。
3 行波法應用于牽引網故障測距的方案
理論上,單端行波法和雙端行波法都適用于牽引網行波故障測距。但是,接觸網結構復雜,其結構和設備(線岔、錨段關節以及分相絕緣器和分段絕緣器等)對行波的傳播產生嚴重影響,行波反射、折射非常復雜,同時沿線變壓器負荷及復雜環境也對行波傳播產生影響。特別是在牽引網上存在多臺移動的機車負荷時,準確獲取故障點反射波或折射波將更加繁雜。
單端行波法測距需要不斷地提取、識別入射波和反射波,并對其性質做出準確判斷,因此利用該方法測距存在一定的困難。
雙端行波法測距只要獲取故障點向兩端傳播的行波波頭信號,不需測反射波,實施較為簡單,并且不受線路及機車狀況的影響。近年來隨著GPS技術的發展,使得基于GPS的精確對時雙端行波法得以實現。GPS可以精確獲得行波到達的時刻,使得該方法計算故障距離是精確并且穩定的。因此雙端行波法測距更適應電氣化鐵道牽引網精確故障定位的需要[5]。
整個接觸網行波故障測距系統由行波數據采集與處理系統、通訊網絡和行波綜合分析系統及遠程維護系統組成。圖3中,牽引變電所中的行波數據采集與處理系統記錄各條線路的電壓、電流暫態信號以及回流線電流暫態信號。目的是當線路發生故障時,能夠可靠記錄到故障信息。行波綜合分析系統運行行波故障測距系統分析軟件,它接收通訊網絡送上來的各行波故障測距裝置記錄到的暫態數據。行波綜合分析系統由一臺工業控制計算機構成,放置在調度中心。

圖3 接觸網行波測距系統原理圖
4 結語
牽引網線路結構復雜、站場分支多、錨段電連接頻繁,AT的接入、多臺機車移動等均使行波的折反射分析復雜,準確獲得故障點反射波的難度較大;行波法中的雙端測距法只獲取故障點向兩端傳播的初始波頭信號,不需測反射波,同時受線路及機車狀況的影響較小,實施較為簡單。行波測距法在電力系統高壓輸電線中應用的理論較成熟,但由于牽引供電系統線路結構、運行方式復雜,使行波法在電氣化鐵道牽引供電系統中的應用還需深入研究。
[1]焦在濱,高仕斌.行波法在電氣化鐵道牽引網故障測距中應用的可行性研究[J].繼電器,2003,31,(7).
[2]譚秀炳.交流電氣化鐵道牽引供電系統[M].成都:西南交通大學出版社,2007.
[3]段晶晶.直供方式牽引網故障行波測距技術[J].山東理工大學學報(自然科學版),2010,24,(5).
[4]葛耀中.新型繼電保護與故障測距原理與技術[M].西安:西安交通大學出版社,1996.
[5]冉旭,廖培金,陳平,等.行波故障測距法在電氣化鐵道牽引網中的應用研究[J].電網技術,2001,25,(2):36-42.
猜你喜歡
汽車維修與保養(2019年7期)2020-01-06 03:30:42
汽車維護與修理(2016年10期)2016-07-10 08:17:41
鐵道通信信號(2016年4期)2016-06-01 12:10:19
電測與儀表(2016年5期)2016-04-22 01:13:50
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年8期)2015-04-17 03:32:52
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維修與保養(2015年7期)2015-04-17 02:12:40
汽車維修與保養(2015年2期)2015-04-17 01:30:34
汽車維護與修理(2015年2期)2015-02-28 12:15:39