一種改進的太陽能電池MPPT技術
2012-09-25 01:51:44任稷林祁承超章周石
通信電源技術 2012年4期
李 金,任稷林,祁承超,章周石
(1.空軍預警學院研究生管理大隊,湖北 武漢430019;2.空軍預警學院科研部,湖北 武漢430019;3.空軍預警學院信息對抗系,湖北 武漢430019)
0 引 言
隨著化石能源的日益枯竭,可再生能源越來越受到人們的重視,而太陽能作為一種取之不盡用之不竭的綠色能源得到了廣泛的應用。其中光伏發電技術更是具有廣闊的發展前景。目前光伏發電主要面臨著設備造價高,太陽能轉化效率低等問題,所以提高太陽能的轉換效率成為了人們的研究重點。由于光伏電池的輸出電壓和輸出電流隨著日照強度和電池結溫的變化具有強烈的非線性特性,在實際的應用系統中,都希望太陽能光伏陣列在同樣日照、溫度條件下輸出盡可能多的電能,即存在一個最大功率的跟蹤[1]。目前最常用的最大功率點跟蹤的方法有:固定電壓法,固定電流法,擾動觀察法和導納增量法。本文分析了擾動觀察法和導納增量法的優缺點,并提出了一種自適應變步長導納增量法的方法克服了上述兩種方法的不足。
1 太陽能電池的數學模型及其特性分析
1.1 太陽能電池的數學模型
光伏極板的等效數學模型為[2]:

式中,I為極板輸出電流;U 為極板輸出電壓;Iph為光生電流;Io為二極管飽和電流;q為電子的電荷量 (1.6×1019C);Rs為太陽能電池的串聯電阻;n為二極管特性因子;k為玻耳茲曼常數 (1.38×10-23J/K);T為太陽能電池溫度;Rsh為太陽能電池的并聯電阻。
光伏極板的等效電路圖如圖1所示。
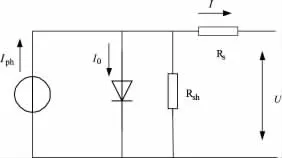
圖1 光伏極板等效電路圖
1.2 太陽能電池的輸出特性
由數學模型及等效電路圖可以得到太陽能電池在光照相同溫度不同時的I-U特性曲線如圖2所示。在溫度相同光照強度不同時的P-U曲線如圖3所示。其中S表示太陽輻射強度,T表示太陽能電池的溫度。
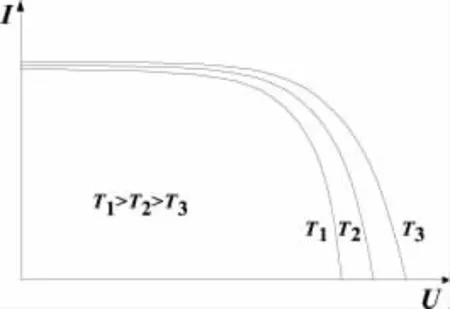
圖2 在S相同T不同條件下I-U曲線
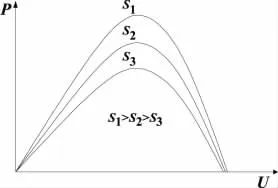
圖3 在T相同S不同條件下P-U曲線
圖2 為光照強度S不變,光伏電池溫度T變化情況下的一組I-U曲線。從圖中可以看出,光伏電池的開路電壓Uoc隨電池溫度的上升而下降,且變化范圍較大;而光伏電池的溫度對短路電流Isc影響不大,隨著溫度的上升短路電流只是略有增加。圖3為溫度T相同的情況下,不同光照強度所對應的不同輸出功率曲線,從圖中可知在同一溫度條件下輸出功率與光照強度成正比。
2 太陽能電池最大功率點跟蹤
2.1 原理分析
太陽能電池的電氣特性如圖4所示。
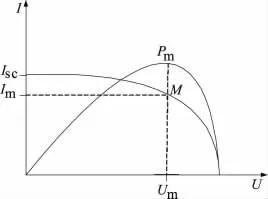
圖4 太陽能電池的電氣特性
由圖4可以看出,太陽能電池的輸出特性,I-U、I-P特性都是典型的非線性曲線,且存在一個M點使得太陽能的輸出功率最大。而最大功率點跟蹤的目的就是在不同的工作條件中(溫度、光照強度)尋找M點使太陽能電池能時時輸出最大的功率。
2.2 擾動觀察法
擾動觀察法的基本思想是:首先擾動光伏電池的輸出電壓(或電流),然后觀察光伏電池輸出功率的變化,根據功率的變化趨勢聯系改變擾動電壓(或電流)方向,使光伏電池最終工作于最大功率點[3]。由圖3可知太陽能電池的P-U特性曲線是一個單峰值的曲線,假設當前輸出電壓為U,現增加一個擾動輸出電壓為U+△U,然后觀察功率的變化,與擾動之前比較,如果輸出功率增大,則說明擾動方向正確,繼續以步長△U向前擾動。如果擾動之后發現輸出功率比擾動之前減小,則說明擾動方向錯誤,應以步長為-△U向后擾動。其工作流程圖如圖5所示。
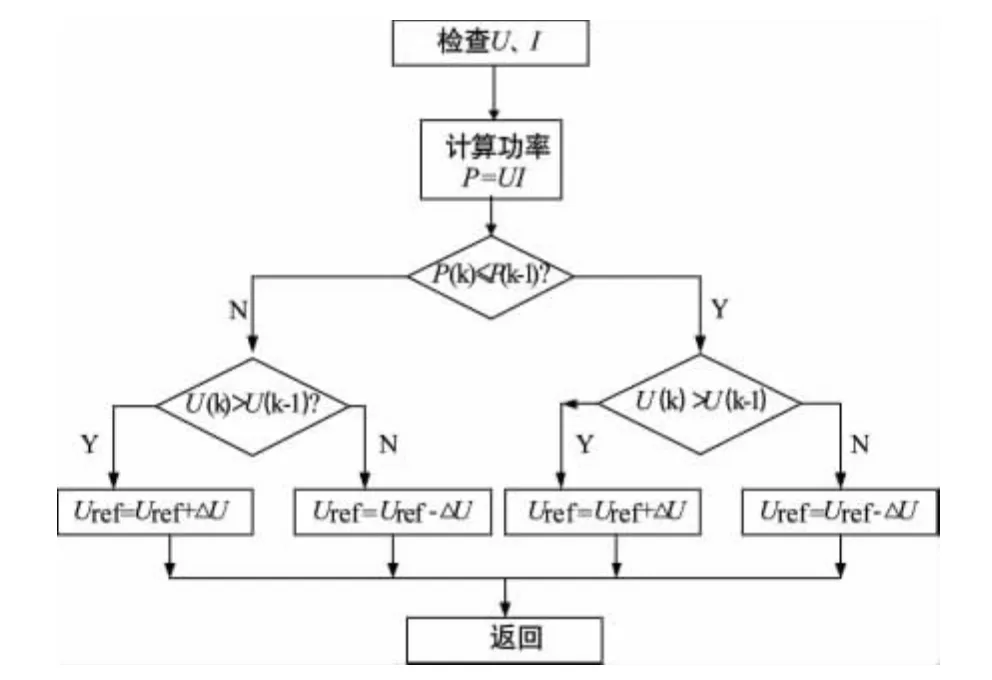
圖5 擾動觀察法的流程圖
擾動觀察法最大的優點在于結構簡單,被測參數少,在實際應用當中易于實現。擾動觀察法的缺點在于其沒有判斷系統是否已經達到最大功率點,即使系統已經工作在最大功率點,依然還會以固定步長在最大功率點附近震蕩,這就造成了一部分功率的損耗。
2.3 導納增量法
由圖3可知,太陽能電池的輸出P-U曲線是一個單峰值曲線,在最大功率點其斜率為零。而導納增量法就是通過尋找這個斜率為零的點,來尋找最大功率點。
導納增量法是根據光伏陣列的P-U曲線在最大功率點處斜率為0而得出的:

式(2)可改寫為,

其具體工作過程如圖6所示。
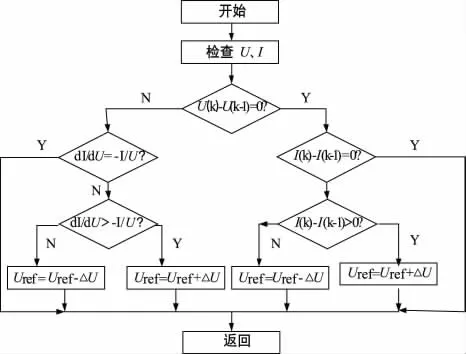
圖6 導納增量法流程圖
導納增量法控制中,步長△U決定了最大功率點跟蹤的速度。較大的步長可以實現快速跟蹤,但是在最大功率點附近震蕩較大,而較小的步長跟蹤速度較慢。這就存在一個不可避免的矛盾。因此,需要對步長進行折中選取。
2.4 自適應變步長導納增量法
通過分析擾動觀察法和導納增量法會發現,這兩種方法都需要一個固定的步長。步長選取較大,系統跟蹤速度快,但在最大功率點附近震蕩劇烈;步長選取較小則會造成跟蹤速度較慢。這就要求對步長的選取進行折中考慮。但是在天氣變化較快的地區,則不適合使用這種固定步長的方法。因此針對上述缺點本文提出了一種基于輸出P-U曲線斜率的自適應變步長導納增量法。
通過分析光伏電池的P-U曲線可以發現,在距離最大功率點較遠的地方,斜率較大;在離最大功率點較近的地方,斜率逐漸減小,最大功率點處為0。圖7所示為標準測試條件下的P-U,d p-U曲線[4]。
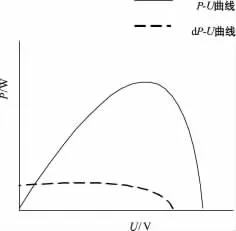
圖7 標準測試條件下的P-U和d p-U曲線
從圖7中可以看出P-U輸出曲線的斜率一直是一個變量,因此可以根據其斜率的大小來確定步長,即步長根據斜率變化而變化的,不再是一個確定的值。令步長△U等于:

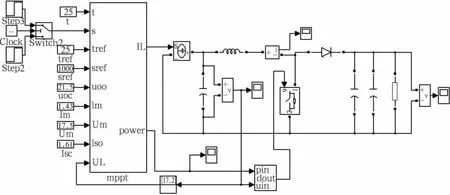
圖8 系統仿真圖
式中,β是一個比例系數。
基于改進的自適應變步長導納增量法,得到Matlab/si mulink控制模塊如圖8所示。
設定溫度為25℃,光照強度從600 W/m2突變到800 W/m2,3.5 s之后溫度又突變為1 000 W/m2。其輸出功率如圖9所示。
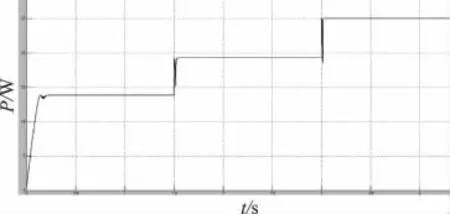
圖9 輸出功率
仿真結果表明,這種改進的自適應變步長導納增量法能夠快速地跟蹤最大功率點,在溫度發生突變的時候系統響應速度快,基本消除了系統在最大功率點附近震蕩的現象,具有良好的動態性能和穩態性能。且該系統克服了固定步長造成的跟蹤速度與系統在最大功率點之間震蕩的矛盾。
3 結束語
本文研究分析了太陽能電池的輸出特性和最大功率跟蹤的幾種常用的方法,并且提出了一種自適應變步長導納增量法。該方法克服了傳統固定步長的導納增量法的不足。
[1] 江小濤,吳麟章,周明杰.太陽電池最大功率點跟蹤研究[J].通信電源技術,2005,22(4):33-35.
[2] 梁希文,蔡麗娟.逆變器死區效應傅里葉分析與補償方法[J].電力電子技術,2006,40(6):118-120.
[3] 張 興,曹仁賢.太陽能光伏并網發電及其逆變控制[M].北京:機械工業出版社.2010.
[4] 王義飛,吳 偉,張皞華,徐 悅.改進型變步長光伏最大功率點快速跟蹤[J].上海大學學報,2011,17(3):249-258.