基于視頻圖像的道路車流檢測系統
2012-09-25 01:49:16韓海玲焦紅巖
電氣傳動自動化 2012年6期
韓海玲,焦紅巖
(蘭州交通大學教育部重點實驗室,甘肅蘭州 730070)
1 引言
隨著現代經濟的高速發展,交通運輸的保障就顯得尤其重要,對交通管理的要求也越來越高,將計算機科學與通信等高新技術運用于交通監控管理與車輛控制,以保障交通順暢及行車安全,從而改善環境質量、促進經濟發展的智能交通系統ITS(Intelligent traffic system,ITS)也隨之產生。在智能交通管理系統中,實時獲取交通車流量的車輛檢測技術是ITS的基礎。利用圖像處理技術來實現交通流量的車輛檢測技術已成為該研究領域的熱點。研究基于圖像處理技術的交通流量車輛檢測技術始于上個世紀80年代,到現在,檢測思想和算法一直在不斷的改進和革新。有的研究基于檢測區域,有的研究基于整幅圖片,大量的文獻都是基于整幅圖片的研究,如背景差分方法、幀差分方法等。
然而,現今的方法中存在有以下問題:必須靠車道來分割不同車輛;使用某一時刻無運動物體的圖像作為背景來提取車輛;忽視車輛陰影的影響;采樣頻率與車速不匹配導致車輛誤計等。對此本研究作了一系列的改進,提出一種新的實用算法,高斯背景建模。主要實現以下幾個目的:①實時獲取背景圖像;②提取每一幀圖像上的車輛;③背景圖像的更新;④區分每一幀上的不同車輛;⑤對檢測到的目標進行跟蹤。
2 實驗方法
背景建模方法很適合在攝像機靜止情景下的背景估計。可以假設背景的緩慢變化符合一個隨機概率分布,利用該隨機概率分布進行背景建模可以得到比較好的背景估計。為解決光線緩慢變化、背景存在擾動干擾等情況,本文主要討論一種自適應高斯背景建模方法,使背景圖像的更新機制具有自適應性,檢測具有魯棒性。運動目標檢測流程如圖1所示。
2.1 高斯背景建模原理
利用高斯分布背景建模就是假設圖像序列在時間域中某點的像素值f(x,y)的變化符合高斯分布,對場景中每個像素點建立高斯模型,對新來的幀進行高斯模型的擬合來提取背景圖像。利用高斯背景建模分為兩個方面:①利用初始幀進行背景初始化;②在檢測的過程中利用新到來的幀對背景進行適當更新,這樣可以使檢測具有自適應性。本文所討論的背景是由于光照變化,微風等原因引起的緩慢周期性變化時,用單一自適應背景模型便可解決。單高斯分布的背景模型適用于運動物體數量少、背景在大部分時間是可見的情況。如果背景中存在植物搖擺、水波晃動等周期性干擾運動且運動目標數量多等復雜環境,則可以考慮混合高斯背景建模或混合高斯背景建模與其他方法的結合,這樣檢測準確性將會得到很大提高。下面主要介紹的是單高斯背景建模理論。
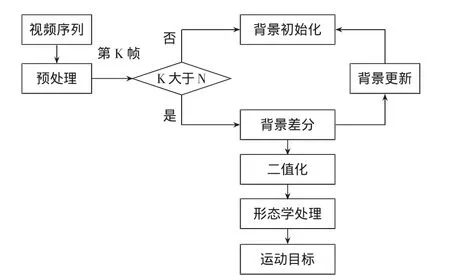
圖1 運動目標檢測流程圖
高斯分布概率密度函數為:
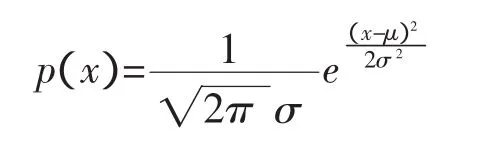
其中:μ為均值,σ為標準方差。單高斯背景模為每個圖像點的顏色建立了單個高斯分布,用η(μ,σ 2)表示。設k幀時圖像點(x,y)的當前像素值為fk(x,y)。
2.2 背景圖像初始化
在建模初期應該利用視頻圖像初始幀快速建立一個背景估計,如果只利用第一幀進行背景初始化,這樣會形成比較大的誤差,對后期的運動目標檢測會產生一定影響。本文討論使用一種統計平均法來背景初始化。統計平均法即求取一段時間內圖像序列中N幀圖像的灰度平均值作為背景圖像的估計值,以弱化運動目標對背景的干擾。設μ0(x,y),σ02(x,y)為某點初始背景估計的均值與方差,則
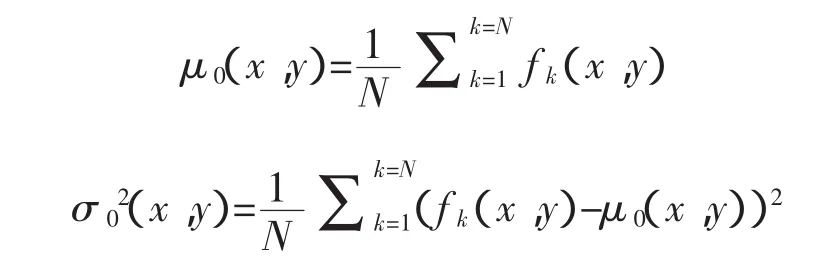
其中:N為所選取的幀數。
2.3 背景圖像更新
算法的思想是當前幀與前一幀的背景模型進行差分,如果大于設定的閾值則像素判定為前景運動目標,該點的背景模型就不用更新;如果小于設定的閾值,則像素被判定為背景,利用相應法則對背景像素進行更新。

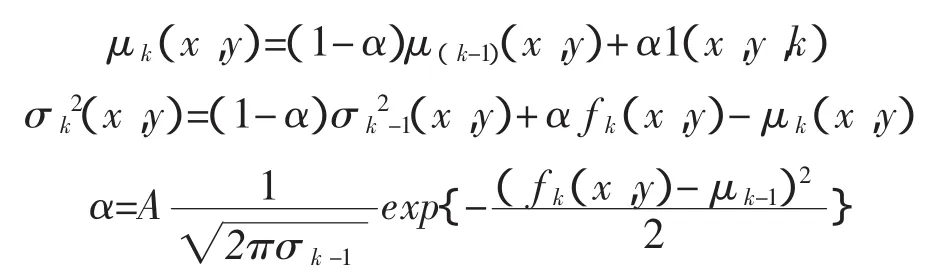
其中:T為前景分割時所選取的閾值。α為背景更新率,其取值范圍為0<α<1。α越小,背景更新速度越慢,α越大,背景更新速度越快。更新速度太慢,需要較長時間才可以適應背景;更新速度太快,背景建模容易引入噪聲,因此α取值要合理。
2.4 運動車輛分割
運動目標分割是檢測當前圖像和背景圖像中對應像素的灰度值差異,如果差值大于某一閾值,則判定該像素為前景運動目標,值為1;否則,值為0。檢測規則為:
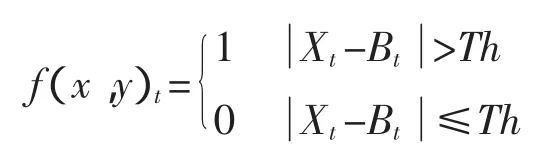
其中:Bt表示像素點(x,y)在時刻t的背景灰度值,Th表示閾值。閾值的選取在二值化過程中非常重要,它的取值直接影響到二值化的效果如何。由于車輛的灰度差別較大,選用固定的閾值將會漏檢或誤檢車輛區域。鑒于此,本文選用Otsu閾值化方法。Otsu閾值化方法是一種自動的非參數無監督的閾值選擇法,它基于類間方差最大的測度準則,當該測度函數取最大時得到最佳閾值。
2.5 運動目標跟蹤
在計算出各個前景區域的特征參數(上述經過篩選后保存的前景區域的特征參數)后,就可以從多個前景區域中指定要跟蹤的目標。文中提出一種根據特征值近似循環的目標指定方法。該方法的設計思想也比較簡單,因為已經對飛行目標和與飛行目標大小接近的云和噪聲的特征值(面積和重心橫縱坐標值)進行了保存,因此當需要選擇跟蹤目標時,從保存的特征參數中選擇一個指定為跟蹤目標。選擇的結果或者是目標,或者是與飛行目標大小接近的云和噪聲。如果不是要跟蹤的目標,從保存的特征值中選擇下一個即可。
特征值被保存的前景區域可以被指定為要跟蹤的目標。這種方法雖然不是直接指定跟蹤目標,但減少了系統設計的復雜度,而且選擇精度高。由于目標數量有限,瞄準手很快就可以選擇上合適的跟蹤目標。當在某幅圖中指定了要跟蹤的目標后就可以在隨后的圖像中識別跟蹤目標了。識別的依據是基于區域面積和區域重心這兩個特征,即在相鄰兩幅圖中這兩個特征的值變化都不會太大。
3 試驗結果及分析
Simulink是Matlab最重要的組件之一,可以提供一個動態系統建模、仿真和綜合分析的集成環境。在該環境中,用戶不需要一行行的編寫程序代碼,只需要通過簡單直觀的鼠標操作,就可以構造出復雜的系統。Simulink具有適應面廣、結構和流程清晰及仿真精細、貼近實際、效率高、靈活等優點,并有大量的第三方軟件和硬件可應用于或被要求應用于Simulink。仿真模塊框圖如圖2所示。
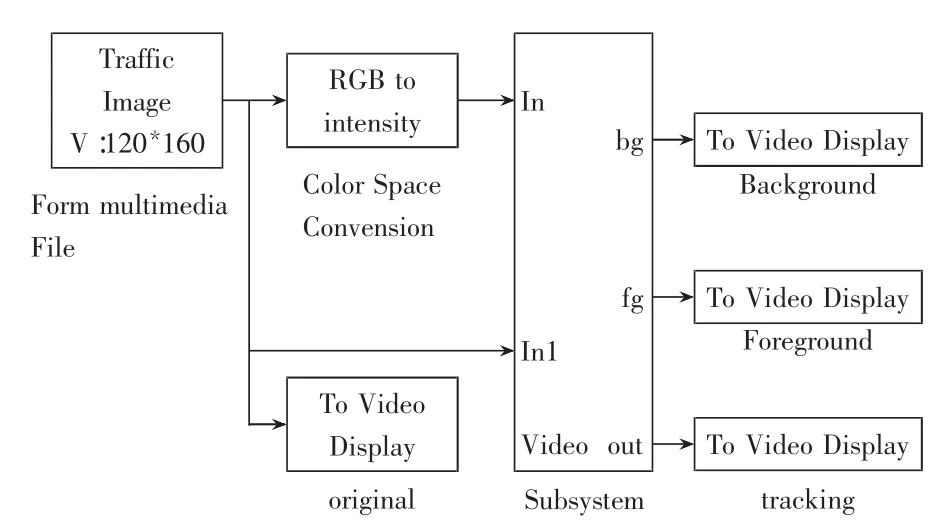
圖2 Simulink仿真模塊框圖
以Simulink為基礎的視頻和圖像處理模塊工具箱提供了視頻和圖像處理中用到的各種子系統模型,它包含11個大類庫,含有數十種模塊類型。用戶無需編程,可直接在Simulink環境下調用仿真,分析和設計圖像處理系統。
通過該模型,可以得到如圖3-圖6所示的處理結果。

圖3 原始圖像
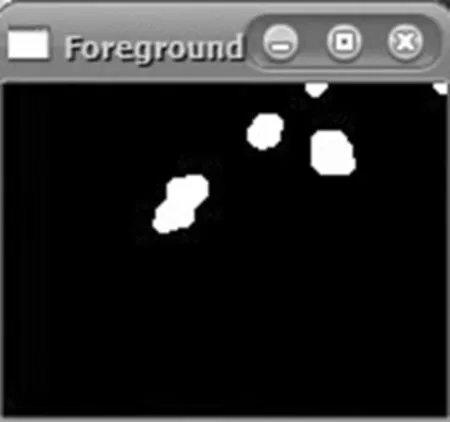
圖4 車輛分割

圖5 車輛標記

圖6 車輛跟蹤
4 結束語
本文提出了一種基于背景模型法的背景更新方法,以簡化混合高斯模型為基礎,提高了處理速度,改進與完善了高斯背景更新方法。以背景差分法為基礎,結合形態學濾波和八連通域算法準確對多個運動目標進行檢測。實驗證明,基于背景差分的多運動目標跟蹤檢測算法不僅簡單快速,而且能夠較好地檢測多個動態目標,證明了算法的可行性,使用價值明顯。
基于視頻圖像處理的車輛檢測法缺點在于大型車輛能遮擋隨行的小型車輛,由于攝像安裝的角度與高度的限制導致的不同車道的車輛遮擋問題,陰影、積水反射或晝夜轉換可造成檢測誤差。
[1]Rafael C.Gonzalez,Richard E.Words,阮秋琦,阮宇智等譯.數字圖像處理[M].北京:電子工業出版社,2003.
[2]章毓晉.圖像分割[M].北京:科學出版社,2001.
[3]張兆禮,趙春暉等.現代圖像處理技術及Matlab實現[M].北京:人民郵電出版社2001.
[4]容觀澳.計算機圖像處理[M].北京:清華大學出版社,2000.
[5]賈云得.機器視覺[M].北京:科學出版社,2003.
[6]吳逸飛編譯.模式識別的原理、方法及應用[M].北京:清華大學出版社,2002.
[7]陸其明.DirectShow開發指南[M].北京:清華大學出版社,2003.
[8]朱 江,宜國榮,鄭振東.基于視頻動態投影的實時車輛流量檢測系統[J].計算機工程,2001,27(11):25-27.
猜你喜歡
汽車工程師(2021年12期)2022-01-17 02:29:54
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
當代陜西(2020年14期)2021-01-08 09:30:42
奧秘(創新大賽)(2020年7期)2020-07-27 08:26:32
貴州師范學院學報(2016年4期)2016-12-01 03:54:07
海峽科技與產業(2016年3期)2016-05-17 04:32:12
