深海環境模擬實驗裝置壓力控制系統設計
2012-09-27 01:41:32劉敬喜
電子設計工程 2012年4期
劉敬喜,王 敏
(1.山東拓普液壓氣動有限公司 山東 濟南 250100;2.山東天宇科技有限公司 山東 濟南 250061)
深海環境模擬實驗裝置壓力控制系統設計
劉敬喜1,王 敏2
(1.山東拓普液壓氣動有限公司 山東 濟南 250100;2.山東天宇科技有限公司 山東 濟南 250061)
為了模擬深海高壓環境,研制了一套深海環境模擬試驗裝置,在對深海環境模擬裝置控制系統結構原理分析的基礎上,提出了一種針對壓力的閉環控制策略,采用以Atmega8L單片機為核心的主控電路、以ECN30206為核心的驅動電路、以Max7219為核心的顯示電路,設計了穩壓控制的定頻調寬變速控制系統的硬件電路,并進行了相應的軟件編制,實現了控制電路各模塊的自由組合,以滿足不同場合的需求,又可組成閉環控制系統,不但能夠顯著提高深海環境模擬裝置的壓力控制精度,同時還具有節能的效果。
深海環境;模擬試驗裝置;壓力控制;電路設計
深海海底有大量的礦產資源和微生物群落,對該環境下進行的生物成礦作用、生命起源等的問題研究,將有助于闡明深海微生物受壓力調節的代謝機制,獲得寶貴的極端環境基因資源,對地質學、地球化學和生命科學等一系列學科研究具有重大的意義[1]。然而由于其處于深海極端環境這一特殊性,難以身臨其境進行觀察與研究,需要在實驗室建立海底極端環境的模擬系統進行實驗來配合相關科學研究。
針對深海環境的特殊性,開發了一套耐高溫高壓的模擬試驗裝置,本文主要探討該裝置壓力精確穩定控制電路設計及控制軟件開發中的相關問題。
1 設計要求及系統組成
1.1 設計要求
研究工作以及要達到的技術指標如下:
l)壓力控制范圍為 0~20 MPa,精度為±2%FS,最小的壓力梯度為1%/min;
2)對壓力的精確穩定控制,在全工作范圍內連續可調;
3)對壓力、流量實時曲線及數字顯示,具有曲線記錄及回放功能。
1.2 系統組成
該模擬實驗裝置主要包括由水泵、深海環境模擬艙、水箱和管路等組成的深海環境模擬系統[2],及其監測與控制系統,可模擬海底熱液口的極端海洋環境,也可模擬一般的海洋環境,還可以完成樣品的培養、加樣、取樣等,其中泵的流量可以根據需要在輸出流量范圍內無級調節,功能切換可以通過截止閥的開或關來實現。監測與控制系統主要完成溫度、壓力、流量等參數的監測及控制。整個系統構成如圖1所示。
本文主要介紹壓力精確穩定控制系統的設計,其它部分另文介紹。系統中的電機選用調速性能好、體積小、效率高的三相無刷直流電機,因為單片機價格低,片內資源豐富,且可以靈活編制程序,所以采用以單片機為核心的控制系統。工作時,傳感器把檢測到的管路壓力及負載轉速反饋到單片機,進一步去觸發由PI構成的調速系統,以PWM方式對電機進行調速,電機帶動油泵工作提供連續可調的壓力源。

圖1 系統構成示意圖Fig.1 Diagram of system structure
2 控制系統硬件電路設計
控制系統總體框圖如圖2所示,本控制系統主要由控制電路、驅動電路、顯示電路、RS485接口電路組成。本系統是速度閉環系統,霍爾位置傳感器的位置信號處理后送專用驅動芯片后產生一個速度脈沖信號,經單片機處理轉換成轉速,再運用增量式PI算法,得到PWM控制信號,經光電耦合電路驅動專用集成驅動芯片閉環控制電機轉速;同時單片機還監控控制系統的運行狀態,當系統出現短路、過流、過壓等故障時單片機將封鎖PWM輸出信號,使電機停機,并通過LED電路顯示故障。考慮到應用的場合不同,對控制系統的需求也不同,本文設計各功能部件時考慮相互獨立性并保留好相應的接口以便構成一個完整的系統。

圖2 控制系統硬件總體框圖Fig.2 Whole block diagram of the control system hardware
2.1 控制電路設計
控制電路主要由Atmega8L單片機[3-4]、PWM信號產生及處理電路、電流檢測電路、轉速檢測電路、隔離電路及接口電路組成。
2.1.1 PWM信號產生及處理電路設計
在本控制系統中,主要是利用ATmega8L內部定時器產生定頻調寬的PWM波信號來控制無刷直流電機的轉速[5]。這里采用ATmega8L的Timer2工作在快速PWM模式下,產生高頻的PWM波形,波形產生后需要進行處理才能得到所想要的輸出信號,處理電路如圖3所示。
2.1.2 電流檢測電路設計

圖3 PWM處理電路Fig.3 Processing circuit of the PWM
本文采用Allegro公司的ACS712集成芯片擴展外圍電路進行測量。ACS712由霍爾元件、霍爾電流驅動元件、偏差調整電路、信號恢復電路、信號放大電路組成,具有價格低、精度高、絕緣性能好等特點。電流檢測電路如圖4所示。ACS712在電流為零時7腳Vo輸出2.5 V,故設計了一個精密電阻RP1分壓產生2.5 V電壓,使放大電路輸出電壓Uo從0 V開始線性變化;為提高電阻分壓帶負載能力,既使2.5 V電壓不隨后級電路影響,這里采用了一級電壓跟隨器使輸出Ui2為2.5 V。據疊加原理可算出圖4中Uo為:

將 Ui2=2.5 V、Ui1=2.5+Ui帶入式(1)可得:

最后將Ui=0.185I代入式(2)可得:


圖4 電流檢測電路Fig.4 Circuit of current detection
從式(3)可以看出輸出電壓與夾在1、2和3、4腳之間電流成正比。將此電壓送入ATmega8L的A/D轉換器處理即可得到電機的工作電流,應用此電流可以對無刷直流電機進行轉矩閉環控制及過流保護。
2.1.3 轉速檢測電路設計
轉速檢測對于控制系統非常重要,由于控制系統主要是由轉速構成的閉環控制系統,所以獲得電機轉速是控制系統的關鍵。由驅動電路通過霍爾IC輸出位置信號,無刷直流電機每轉一周輸出12個脈沖FG信號,但這些脈沖信號干擾比較大,不能直接被ATmega8L處理,所以必須對脈沖FG信號進行濾波提取。如圖5所示,由于驅動電路開路輸出,所以電路加了上拉電阻R11。FG信號諧波比較多,設置C4起到濾波的作用,其值大小比較難確定,需要通過實驗調整。FG信號通過P521在3腳產生一個比較穩定、無諧波的FG’信號,其中C5不能選用過大,否則FG’信號會失真,以致ATmega8L識別不出來。ATmega8L內部Timer1具有16位的輸入捕捉單元,通過外部引腳ICP1來捕捉外部事件。讀取ICR1時捕捉寄存器先讀低字節ICR1L,然后再讀捕捉寄存器高字節ICR1H。再根據兩次捕捉寄存器的差值就可以算出電機轉速。
隔離電路是為了避免驅動電路及其接口電路受強電壓的影響,在外電路接口線上加的光電耦合隔離,以保證電路正常運行。

圖5 轉速檢測電路Fig.5 Circuit of rotational speed test
2.2 驅動電路設計
驅動電路是主控電路與無刷直流電機之間的橋梁,本控制系統采用日立公司的專用集成無刷直流控制芯片ECN30206。ECN30206專用集成無刷直流控制芯片適用于直流500 V電壓、1 A以下,功率在20~300 W的三相有位置傳感器的無刷直流電機。ECN30206驅動芯片由內部自帶6個全橋IGBT開關管(上橋臂和下橋臂)及每個IGBT都帶保護的續流二極管,用于3個上橋臂電壓提升的電荷泵電路、無刷直流電機方向控制電路,為ECN30206驅動芯片產生時鐘的聲表面波產生電路、PWM產生電路、三相非配器、過流及欠壓保護電路、轉子位置檢測電路組成。三相分配器內部具有換相控制表,依據表格中相對照的值來合理分配各個橋臂的通斷狀態。根據ECN30206集成驅動芯片的內部原理分析和霍爾開關芯片的工作原理可以設計直流電機驅動電路如圖 6[6]所示。
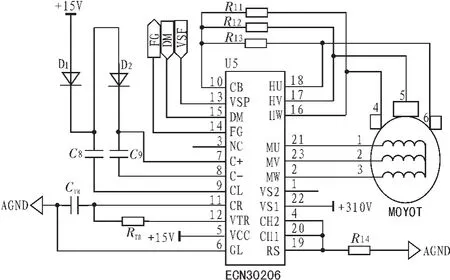
圖6 ECN30206驅動電路Fig.6 Drive circuit of the ECN30206
該系統采用的是4對磁極的無刷直流電機,所以一個機械角為90°,電導通角為30°,因而3個霍爾開關集成芯片EW632需每隔30°放一個,以檢測無刷直流電機的轉子的位置。3片EW632輸入信號與開關管導通狀態對應關系如表1所示。
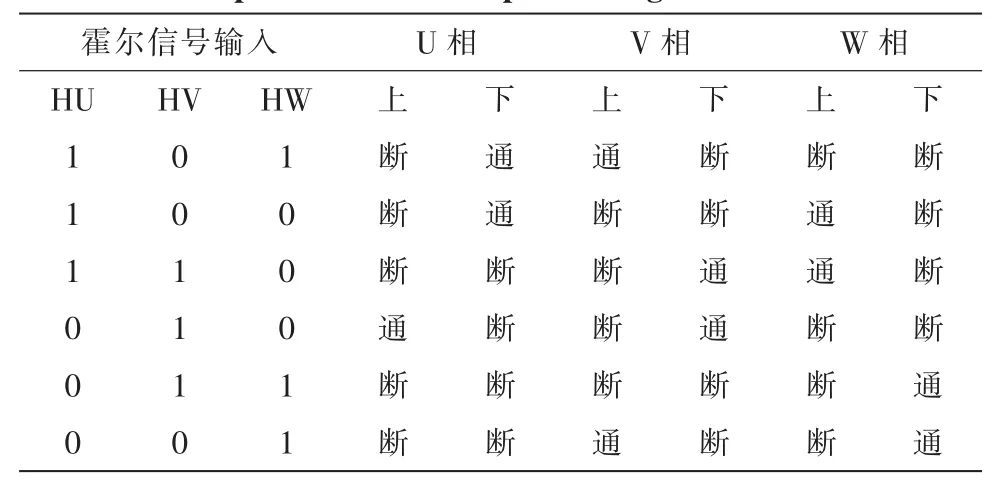
表1 位置信號與開關管狀態對應關系表Tab.1 Correspondence between position signals and switch status
1)內部PWM各項參數的確定
內部PWM波的頻率由聲表面振蕩器(SAW)、11腳接的電容CTR和12腳接電阻RTR確定,如式:

本系統選用的 CTR為 1 800 PF,RTR為 22 kΩ,據式(4)可得PWM頻率為12.5 kHz。
PWM占空比由13腳輸入的模擬電壓VSP確定。當VSP的值小于聲表面振蕩器幅值的最小值Vsawl時,PWM占空比為0%,所有的IGBT管都將關閉;當VSP的值大于聲表面振蕩器的最大值VsawH時,PWM占空比為100%;當VsawL≤VSP≤VsawH時占空比P與VSP的大小成線性:

因此只需改變VSP的大小就可以對電機進行線性無極調速。
2)電機轉一周FG脈沖個數的確定
泵站采用的無刷直流電機有4對磁極,電機轉一周FG脈沖個數為12個脈沖。
3)電荷泵外部電路參數確定
為了打開橋臂IGBT功率驅動開關,必須先提升門極電壓才能打開,ECN30206內部有電荷泵電路,用戶只需設定外部電路各器件參數即可。電容的大小決定了充電時間,即決定了IGBT驅動開關管打開的時間,因此不能過大,否則打開時間過長造成事故,這里電容都選為1 μF。
4)負壓及過流保護
當ECN30206檢測到VCC引腳電壓小于12 V時所有的IGBT功率驅動開關管關閉,直到VCC大于12 V時才恢復正常工作。
電流保護是通過在下橋臂IGBT串接電阻到地GL分壓反饋到ECN30206內部過流電壓比較器實現,內部過流電壓比較器參考電壓Vref為0.5 V,這里設定最大電流值Imax為1 A,則Rs的值為:

將 Imax=1 A,Vref=0.5 V 代入式(6)得 Rs為 0.5 Ω,這里選用康銅絲。
5)電路穩定的保證
為使驅動電路穩定及提高抗干擾性,必須對各引腳進行處理,在引腳上適當的加上拉電阻或下拉電阻,在高輸入阻抗的引腳處加上高頻旁路電容以消除高輸入阻抗引腳對高頻噪音的敏感性。
2.3 RS485顯示電路及通信接口電路設計
控制系統采用美國MAXIM(美信)公司的MAX7219驅動芯片做LED數碼顯示驅動芯片,驅動8個8段數字LED顯示器,顯示永磁無刷直流電機的轉速、工作電流及其故障。ATmega8L內部集成了一串通信模塊,因此在外圍擴展一RS485接口驅動芯片即可以進行通信,這里系統采用的是MAXIN公司的MAX487作為驅動芯片,在具體應用時將芯片的RE和DE兩個使能端接在一起,使MAX487處于某一確定的狀態,同時也節約了系統的I/O口。顯示電路及通信接口電路是比較常見的通用電路,由于篇幅有限這里不做詳細介紹。
3 控制系統軟件程序設計
控制系統硬件電路設計完成后需要進行軟件編制工作。系統的軟件設計具體體現了系統的技術要求,是整個系統控制規律的邏輯實現。
本控制系統軟件設計采用前后臺系統,即系統由一個死循環程序加多個中斷服務子程序組成,任務比較多時,用實時操作系統(RTOS),提高單片機CPU的使用率。主程序由系統初始化轉子轉速計算和轉速PID閉環控制組成,完成系統的大部分功能任務;中斷程序主要對中斷時間進行檢測并通知主程序進行相應處理,完成必要的實時性功能,從而節省CPU的時間,使程序各部分功能可靠地運行;中斷程序主要用來串行中斷接收上位機發來的轉速設定值、定時中斷檢測電流及顯示轉速值和相關故障。
3.1 轉速數字PID閉環控制程序設計
為實現電機轉速跟隨給定值變化,控制系統采用PID算法對轉速進行閉環控制[7]。確定PID算法的各參數后,用Atmega8L單片機實現比較簡單,在程序中定義一個結構體變量存放用戶設定轉速值、當前轉速值、前次誤差值、當前誤差值、累計誤差值、比例常數、積分常數和微分常數,結構體定義源程序如下:

按照PID控制算法編制控制程序,控制定時器T2的PWM波占空比從而改變VSP電壓值的大小實現閉環
轉速控制,其中隨著采樣次數的增加,累計誤差也將會飽和溢出,所以必須進行抗飽和處理。
3.2 聯機通信程序設計
電機的轉速設置可以通過調節精密電位器,然后將電壓值模數轉換,根據模數轉換值改變PWM的占空比,改變驅動器輸入電壓VSP;也可以通過控制系統與上位機通過RS485總線通信實現,直接由上位機發送速度值,通過上位機還可以根據不同型號的電機設定不同的電流保護值,同時控制系統可以將運行及故障信息反饋給上位機,供上位機參考。
4 結 論
1)采用以Atmega8L單片機為核心的主控電路、以ECN30206為核心的驅動電路、以Max7219為核心的顯示電路,三部分相互獨立,可單獨選用,滿足不同場合的需求,又可組成一閉環控制系統。
2)設計的壓力控制系統可以保證深海環境模擬系統壓力精確穩定控制,并可以實現連續可調。
3)該系統也可為其他壓力控制系統提供有益的參考。
[1]沈國鑒,胡勇,殷俊易宏.2 000 m多用途深海環境模擬裝置的可靠性分析[J].上海交通大學學報,1990,24(4):17-25.
SHEN Guo-zhen,HU Uong,YIN Jun-yi-hong.2 000 m multipurpose deep sea environmentsimulatorofreliability analysis[J].Journal of Shanghai Jiaotong University,1990,24(4):17-25.
[2]侯繼偉.深海極端海洋環境模擬平臺電液比例壓力控制技術研究[D].浙江:浙江大學,2005.
[3]葉敬安,翁新華,顧毅.高電壓帶電清掃機器人液壓調速系統設計[J].設計與研究,2006,33(12):12-14.
YE Jing-an,WENG Xing-hua,GU Yi.Hydraulicspeed control system design for the high voltage hot-line cleaning robot[J].Design and Research,2006,33(12):12-14.
[4]馬潮,詹衛前,耿根德.ATmega8原理及應用[M].北京:清華大學出版社,2003.
[5]駱驕,楊振強.基于ATmega8的新型電動自行車調速控制系統設計[J].國外電子元器件,2005(5):17-19.
LUO-Jiao,YANG Zhen-qiang.Based on the ATmega8 new electric bicycle speed regulation control system design[J].Foreign Electronic Components,2005(5):17-19.
[6]林周雄,梁杰申.采用ECN3067實現對無刷直流電機的控制[J].微計算機信息,2005,21(2):31-32.
LIN Zhou-xiong,LIANG Jie-shen.Use the ECN3067 to realize brushless dc motor control[J]. Microcomputer Information,2005,21(2):31-32.
[7]黎啟柏,陳剛,朱建輝.二次調節液壓系統的開關-模糊-PID控制[J].機床與液壓,2003(5):90-91.
LIANG Qi-bo,CHEN Gang,ZHU Jian-hui.The secondary adjusting hydraulic system of the switch-fuzzy-PID control[J].Machine and Hydraulic Pressure,2003(5):90-91.
Design of pressure control system for deep-sea environment simulator
LIU Jing-xi1,WANG Min2
(1.Shandong Top Hydraulic&Pneumatic Co.Ltd.,Jinan250100,China;2.Shandong Tianyu Science and Technology Co.Ltd.,Jinan250061,China)
In order to simulate the deep-sea high-pressure environment,a testing device which can simulate the deep-sea environment was designed.Based on the analysis of its control system,a closed-loop control strategy of pressure was proposed.Hardware circuit of the constant-frequency variable-speed control system was designed.Its main control circuit used Atema8L,a single-chip microcomputer,as the core.ECN30206 was used in the drive circuit as the core,and Max7219 was used in the display circuit as the core.The various parts of the hardware circuit can be individually used to meet different needs.This system not only can improve the accuracy of pressure adjustment significantly,but also has energy-saving effect.
deep-sea environment; simulation testing device; pressure control; circuit design
TP302.7
A
1674-6236(2012)04-0084-04
2011-12-19 稿件編號:201112112
國家海洋公益性行業科研專項經費項目(201105031-4)
劉敬喜(1966—),男,山東濟南人,高級工程師。研究方向:液壓氣動技術。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45