基于DSP-FPGA的多軸運動控制系統設計
2012-09-29 06:09:38丁大偉
制造業自動化 2012年7期
關鍵詞:系統
劉 巖,丁大偉
LIU Yan, DING Da-wei
(長春理工大學 機電工程學院,長春 130022)
0 引言
在紅外尋的彈頭中,紅外目標模擬器主要用來模擬目標源和干擾源,用來檢測紅外尋的系統的靈敏度、捕獲概率和跟蹤特性等性能[1]。為了達到很好的模擬效果,受控部件間的運動關系具有一定的相關性,并且必須完成對它們的準確控制,因此對目標模擬器的驅動控制系統性能要求比較高。
近年來,國內已經將單片機、FPGA和DSP等數字控制器成功的應用到多軸運動控制系統中。數字控制器具有對環境變化不敏感、可實現復雜算法和可增加附屬功能等優點,是今后控制器發展的方向[2]。數字信號處理器(DSP)被廣泛應用于電機控制中,如TI公司的C2000系列DSP,其可以高速完成一些較為復雜的算法,但是其外設模塊結構是固定的,用戶無法對其修改,使設計缺少靈活性。現場可編程邏輯門陣列(FPGA)具有集成度高、功耗低、編程配置靈活且易于移植等優點。將FPGA應用到多電機的控制系統,可以簡化系統的硬件結構,增加系統設計的靈活性。在國內現有的運動控制器中,FPGA通常只負責一些簡單的邏輯操作,并沒有充分發揮它的性能[3]。
本文采用DSP和FPGA的結構設計了紅外目標模擬器的驅動控制系統,其具有良好的人機交互界面,實現了可變光闌電機與干擾投放電機的同步變速控制,以及兩個干擾投放電機間的同步控制,并且完成了對它們的精確定位。系統中對DSP和FPGA進行了功能劃分,在硬件上實現了對多路電機的并行控制。
1 模擬器基本工作原理
1.1 總體結構
目標模擬器系統是由黑體作為紅外光源產生兩路紅外光,經光學系統形成一路平行目標光線和兩路平行干擾光線。其光學總體結構中包括離軸拋物面鏡組、可變光闌、干擾模擬組件和目標模擬組件。它是一種對稱的結構,包括兩個對稱的干擾通道和一個目標通道,主要受控部件為可變光闌(目標通道)和干擾模擬組件 (干擾通道),共有7個電機。
1.2 目標模擬原理
在模擬器系統中可變光闌機構的作用是模擬目標的形狀、大小和彈目距離[4],由圖1可知:

式中為為可變光闌開口的大小,L為彈目距離, 為投影物鏡焦距,D為目標大小。
又因為彈目距離:

式中L0為彈目距離初值,v為彈目接近速度,t為工作時間。
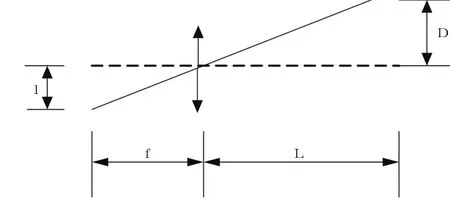
圖1 彈目距離模擬原理
由機械結構知可變光闌開口大小和電機的位置成一定的線性關系,則電機運動角度:

其中k為常數。
對(3)式求導得:

由式(3)、式(4)知可變光闌電機模擬目標接近時,其運動軌跡是不規則的,且其運動速度是單調增的,因此可變光闌電機需一直加速運行。
1.3 干擾模擬原理
圖1中干擾模擬組件1和2是對稱的,都是由干擾模擬板和可控光闌組成。其中干擾模擬板的設計是以阿基米德螺旋線和高斯公式為基礎的,阿基米德螺旋線又稱等速螺線[5]。每個通道的模擬板包括直線板和阿基米德螺旋線板,兩塊模擬板需同軸安裝。在工作時首先使直線板旋轉一定角度,然后旋轉螺線板,輸出的光信號會按照直線板的角度勻速移動。可控光闌是用于實現干擾的工作狀態,單干擾時將不工作的通道光闌關閉。
若干擾彈從平飛的飛機向下以速度V拋射,模擬的彈目距離為L,則根據高斯公式:


又由于:

其中x',x分別為模板線位移和模擬的干擾位移,則:

對上式求導得模板旋轉的線速度:

根據式(9)知螺線板的運行速度與可變光闌電機的位置有關,其也為變速運動。模擬一次干擾時,螺線板旋轉一圈,因此需對螺線板進行定位,同時在模擬連射干擾時,兩次干擾間的間隔可調。
2 控制系統設計
控制系統采用基于定點DSP和FPGA的結構,結合電機驅動電路以及編碼器來完成對多路步進電機的驅動控制,其硬件結構如圖2所示。
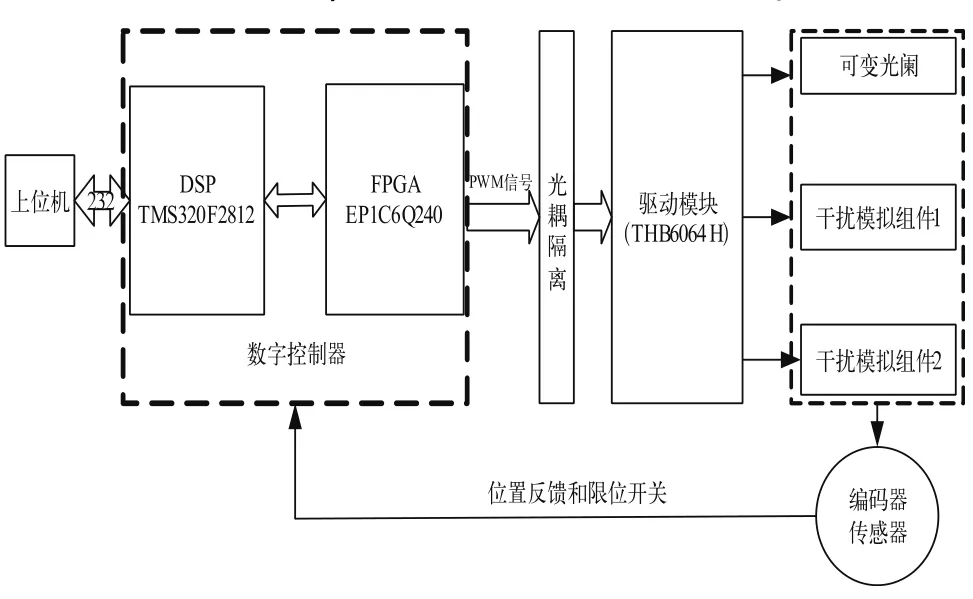
圖2 系統硬件結構框圖
根據DSP和FPGA的不同特點,在本系統中對它們進行了功能劃分。DSP負責完成系統的初始化、與上位機的通信和PWM信號的產生,以及完成對電機的同步變速和電機位置的計算;FPGA主要負責完成對編碼器和傳感器信號的采集,通過與DSP之間的數據交換完成對電機的控制。在FPGA中還設計了脈沖發生器模塊,用于模擬器系統的初始化,便于系統的擴展。系統中選用的電機均為兩相混合式步進電機,本系統步進電機的驅動電路是基于東芝公司的大電流驅動芯片THB6064H設計的, THB6064H采用雙全橋MOSFET驅動,輸出峰值電流可以達4.5A,高耐壓,具有多種細分選擇,最高可以進行64細分。
3 軟件設計
本系統采用的是一種離線編制數據表,實時查表控制的方法。電機的同步變速是在DSP中實現的,由于DSP不僅是只用來對電機的控制,還需要實時的控制SCI串口,接受和發送人機交互界面需要的數據。如果采用實時計算的控制方法,一方面系統運行速度受限制,另一方面由于系統資源有限,實時計算會導致系統其它功能受影響。
3.1 同步變速算法
可變光闌電機在有效工作時間內運行軌跡為不規則的,所以采用多份勻速運動來擬合變速運動。當彈目接近速度為v時,可變光闌電機從閉合運行到最大尺寸時(即模擬目標從初始位置到終點)的工作時間為tmax。設每份勻速運動時間為T(與系統采樣時間相等),則:


由式(10)、式(11)可以計算出可變光闌電機的位置數據表。在通過查表運行時,在[nT,(n+1)T]內,電機需轉過的角度為:

式中 n = 0,1,2 … N-1。

其中R[·]為取整運算。如果mn大于一個脈沖當量,在nT時刻,輸出脈沖周期 ,如果mn小于一個脈沖當量,則不輸出脈沖,這樣就實現了可變光闌電機的變速。
干擾模擬電機運行速度與可變光闌位置有關,因此需把可變光闌的最大開口尺寸等分,計算出對應干擾模擬電機的速度,建立速度表。在每個可變光闌工作時間T內,首先讀出其位置,然后通過查表給出干擾模擬電機的運行速度,實現干擾模擬電機與可變光闌電機間的同步變速。
3.2 可變光闌與干擾模擬程序設計
在DSP接受到上位機發射命令后,將執行電機同步變速子程序,其流程如圖3所示。θ0、θ1、V分別為可變光闌電機初始位置、需要工作到的位置和干擾模擬電機速度。在此程序中,主要任務是設定系統工作的初值,系統采樣的時間可以由制表間隔確定。
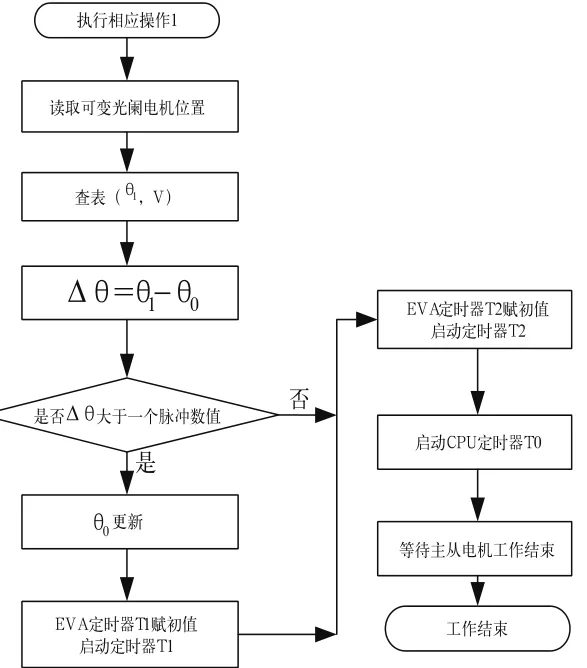
圖3 同步變速子程序流程圖
中斷程序主要完成主從電機位置的采集,以及對可變光闌電機和干擾模擬電機工作速度值的更新,即對定時器1、2重新裝載周期值,實現電機的變速,其程序流程如圖4所示。
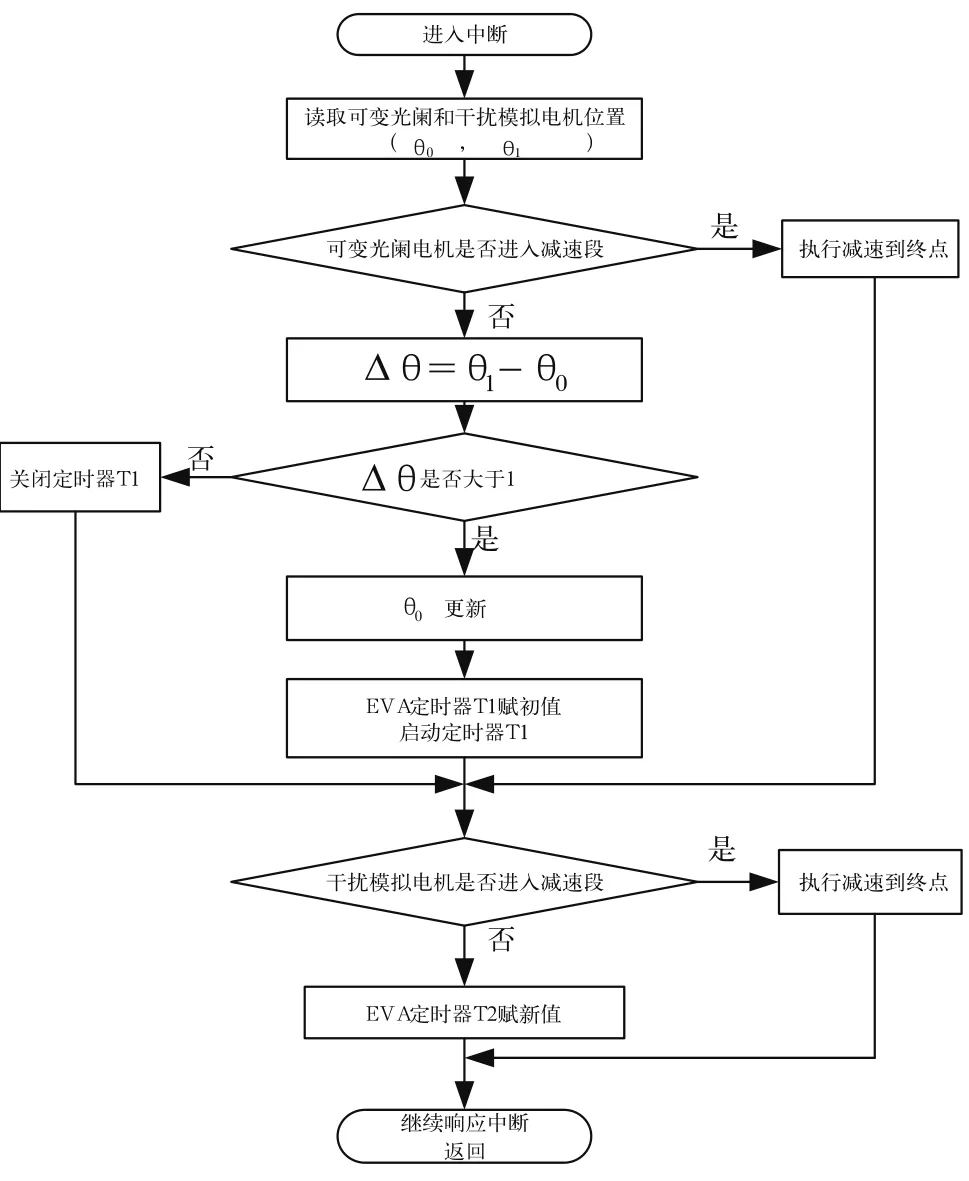
圖4 中斷服務程序
4 實驗結果
在做實驗時,系統通過編碼器對可變光闌電機和干擾模擬電機進行了速度測試。測試方法為在一定采樣時間內,通過編碼器讀取電機的位置值,通過仿真器把數據導出,然后通過Matalb軟件計算分析。
4.1 可變光闌電機速度實驗
可變光闌電機工作速度與模擬的彈目接近距離和速度有關,實驗中測試了模擬彈目距離初值為10000m,終點為450m,模擬速度分別為1000m/s、600m/s、100m/s時的可變光闌電機工作情況。實驗結果如圖6所示。從圖中可以看出,電機在三種模擬速度下,工作時間滿足設計的要求。電機在前段部分速度是一直加速運行的,運行速度與建立的速度數據表相比,通過計算均方誤差在1%以內。為了使電機能夠停在最終模擬位置,在電機工作末尾還作了一定的減速處理。
4.2 干擾模擬電機速度實驗
干擾模擬電機工作速度與可變光闌電機位置有關,實驗中測試了投放一次干擾時電機的工作速度值,如圖6所示。
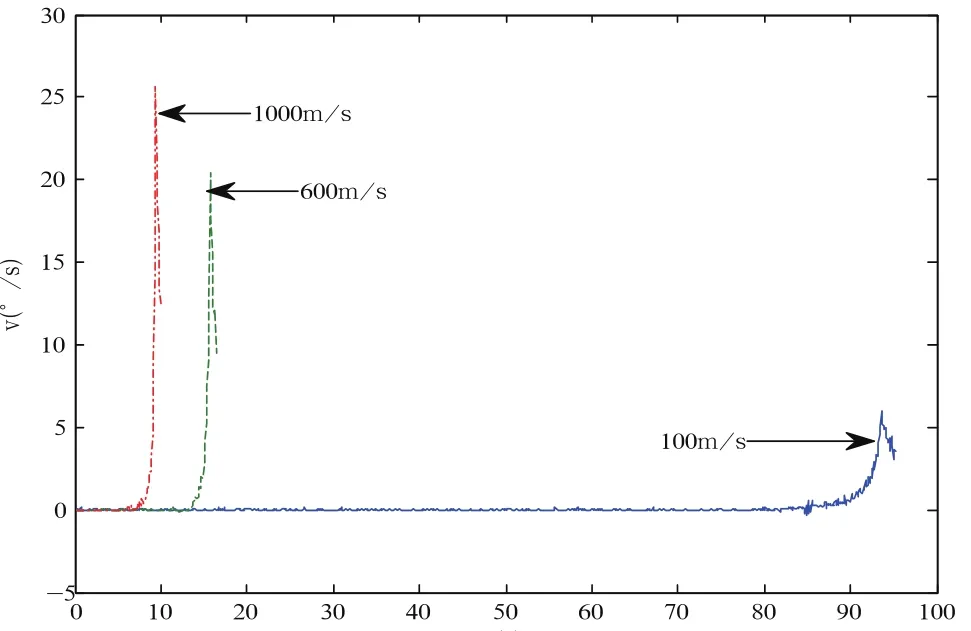
圖5 可變光闌電機運行結果
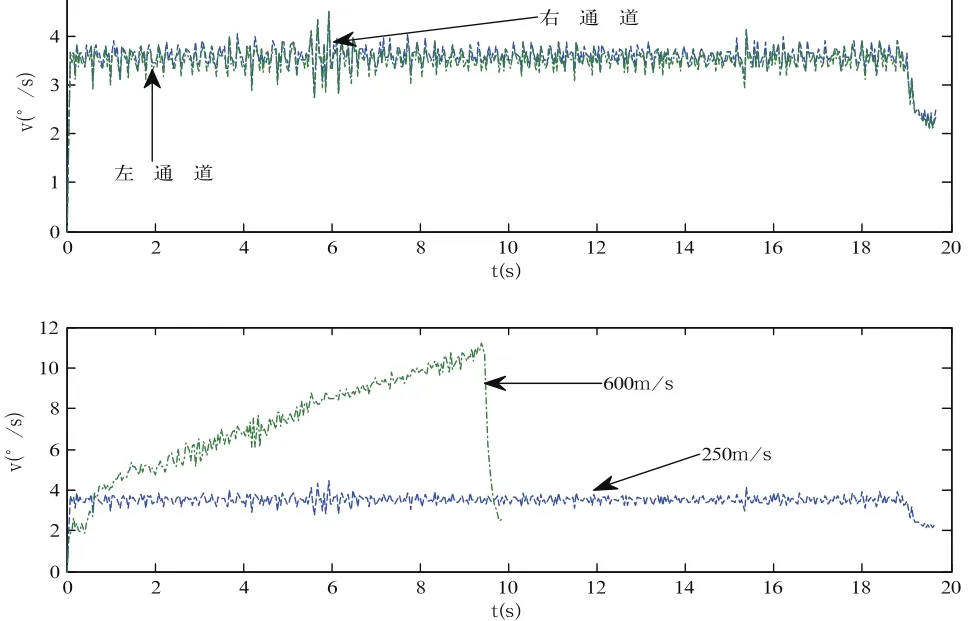
圖6 干擾模擬電機運行結果
圖6中上圖是左右通道干擾模擬電機在目標模擬速度為250m/s,干擾投放速度為10m/s時的運行結果對比,從圖中可以看出,兩邊干擾同時投放時電機基本保持同步,滿足系統的設計要求。下圖是在模擬目標速度為600m/s和250m/s,干擾投放速度為10m/s時的運行結果。從圖中可以看出干擾電機運行速度與可變光闌電機位置有關,模擬速度在600m/s時,干擾模擬電機速度上升比較快,對應可變光闌位置變化比較大;而250m/s時投放一次干擾,干擾模擬電機速度基本保持不變,可變光闌電機位置基本不變。通過對測試數據中的一些數據計算分析,其誤差可以保證在2%以內。
5 結束語
本文以某紅外目標模擬器系統為背景,設計了一套基于DSP和FPGA的控制系統。通過對DSP和FPGA的功能劃分,實現了對目標模擬器中多路步進電機的控制。文中首先通過分析目標模擬器的基本工作原理,即在正常工作時,模擬器中受控部件如可變光闌電機和干擾模擬電機需同步變速運行。系統中提出一種三路電機的同步變速算法,實驗結果表明,該控制系統可以實現對三路電機的同步變速以及其他電機的聯動操作,可以對電機進行定位,具有較好的動、穩態性能,滿足模擬器系統的性能要求。另外使用DSP和FPGA的控制系統結構,具有一定的通用性,便于進一步研究其他多軸運動控制系統的設計。
[1] 戴景明,蕭鵬.紅外目標模擬器校準系統研究與分析[J].儀器儀表學報,2007,28(4),96-99,117.
[2] 王大彧,郭宏.采用DSP和FPGA直驅閥用音圈電機驅動控制系統[J].電機與控制學報,2011,15(4):7-12.
[3] 顏景斌,劉嘉輝,謝金寶,等.矢量控制速度伺服系統的FPGA實現[J].電機與控制學報,2007,11(1):17-20.
[4] 王治樂,張偉,何蕓蕓,等.紅外目標模擬器視場光闌機構研究[A].紀念馬祖光院士全國光電子與光電信息技術學術研討會論文集[C],2006:614-616.
[5] 胡洋,馮進良,閆鈺峰,等.多目標模擬干擾器中的運動特征的模擬[J].長春理工大學學報,2011,34(1):30-33.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
