基于高斯函數及分批估計融合理論的無線網絡定位算法
2012-10-10 03:25:32馬春龍張啟英
長春工業大學學報 2012年1期
關鍵詞:模型
馬春龍, 張啟英
(長春大學光華學院 信息工程學院,吉林 長春 130031)
0 引 言
近幾年,國內外無線傳感器網絡技術得到了飛速的發展,特別是在國內,由于無限傳感器網絡技術是中國政府支持發展的主要方向,因此,無線傳感器網絡技術也被應用在各個領域,其中,無線傳感器網絡定位技術被應用于人員、物品的定位及管理。而在國外,采用無線傳感器網絡實時定位系統的企業越來越多,僅2010年一年的時間,在企業數量上就比往年增長了3倍之多。與此同時,關于無線傳感器網絡定位算法的研究也得到了很大的發展,特別是近幾年提出了許多新穎的解決方案和思想,根據具體的定位機制,可以將現有的無線傳感器網絡人員定位算法分為兩類:一是基于測距的(Range based)定位算法;二是無需測距的(Range free)定位算法。Range based定位算法需要測量盲節點與參考節點之間的距離或角度信息,然后使用三邊測量、三角測量等方法計算盲節點的位置。文中采用基于測距的定位算法,距離的測量是通過測量目標節點和參考節點之間傳輸信號的RSSI值來實現的,而傳輸信號的RSSI值容易受到外界隨機干擾的影響,導致測量的距離值不準確而產生定位誤差。因此,剔除采集到信號中的RSSI值的干擾量對提高定位精度具有重要意義[1]。
1 系統的總體設計
1.1 定位系統結構
基于無線傳感器網絡的定位系統主要由無線傳感器網絡目標節點、參考節點、匯聚節點及控制中心計算機組成,系統結構如圖1所示。
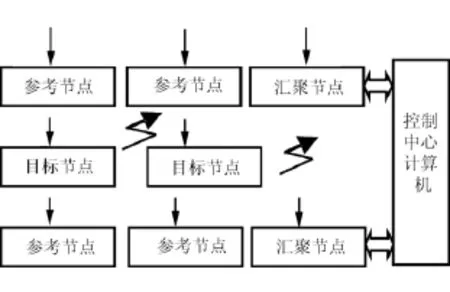
圖1 定位系統結構
1.2 各節點硬件電路
各節點硬件電路的控制芯片選用CC2430/1,CC2430芯片為Chipcon公司生產的2.4GHz射頻系統芯片。該單芯片上整合了ZigBee RF前端、內存、微控制器。
其主要特點如下:高性能和低功耗的8051微控制器核;集成符合IEEE 802.15.4標準的2.4GHz的RF無線電收發機;在休眠模式時僅0.9μA的流耗,外部的中斷或RTC(實時時鐘)喚醒系統,在待機模式時少于0.6μA的流耗,外部的中斷能喚醒系統,滿足無線網絡傳感器節點低功耗的要求。較寬的電壓范圍(2.0~3.6V);具有電池監測和溫度感測功能;集成了14位ADC;帶有2個 USART 等[2-3]。
1.3 基本工作情況
該系統以3~12(最多16個)個參考節點(Reference Node)構成一個最大區域為60m×60m的無線定位網絡。參考節點之間通過802.15.4/ZigBee無線通訊標準保持無線聯系,通過上位機軟件可以實現對全部參考節點的無線參數配置。
對于一個定位應用來說,參考節點的位置是已知的,并且它是靜止的,可以在被請求時告訴其它節點它的坐標。目標節點(以CC2431芯片為核心)是移動的節點,它安裝在定位目標上,由電池供電。當目標節點進入由參考節點、匯聚節點等組成的監控網絡時,就會向參考節點發出RSSI請求,并將接收到的RSSI根據高斯分布函數及分批估計融合理論的定位算法計算處理,然后,將其送入CC2431硬件引擎自動計算自己的位置坐標,準確定位,并將定位信息和目標節點ID等信息實時無線發送給上位機。
1.4 上位機定位軟件
基于VB環境,編寫了上位機定位軟件。
2 傳統定位算法
2.1 RSSI測距法
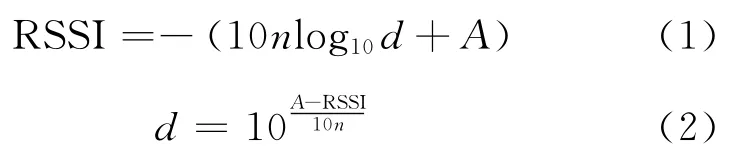
式中:n——信號傳播常數;
d——與參考節點的距離;
A——距離參考節點1m的接收信號強度。
RSSI測距法比較簡單,但是,由于實際環境中溫度、多徑效應等條件容易發生變化,使得計算出的距離有很大誤差。
2.2 三角形質心定位法
三角形質心定位算法是:參考節點p1,p2,p3在目標節點的請求下,分別周期性地發出自身的位置信息,目標節點接收參考節點攜帶了位置信息的RSSI。并根據式(2)分別計算出3個參考節點到目標節點的距離d1,d2,d3,再分別以3個參考節點為圓心,d1,d2,d3為半徑畫圓,通過計算相交圓的交點及由交點組成的三角形的質心來估算目標節點的坐標,使目標節點的坐標值更準確[4]。
2.3 傳統模型分析RSSI
隨機數模型是指當目標節點采集到一個RSSI值,則馬上進行定位計算,該模型優點在于定位實時、運算量小,適用于處理速率較低的硬件平臺,但在實際定位環境中,RSSI值極易受到外界干擾,該模型也容易受到外界干擾。
統計均值模型是目標節點采集一組n個RSSI值,然后求這些數據的均值,該模型可以通過調節n來平衡實時性與精確性,當n很大時,可以有效解決定位數據隨機性誤差問題,計算量會相應增加,但外部擾動較大時,該模型的定位精度也不高[4]。
3 基于高斯分布函數及分批估計融合理論的定位算法
3.1 基于高斯分布函數的RSSI數據處理
3.1.1 關于高斯分布函數
高斯分布即正態分布(normal distribution),是一種概率分布。第一參數μ是服從正態分布的隨機變量的均值,第二個參數σ2是此隨機變量的方差,所以正態分布記作N(μ,σ2)。服從正態分布的隨機變量的概率規律為取μ鄰近值的概率大,而取遠離μ值的概率小;σ越小,分布越集中在μ附近,σ越大,分布越分散。正態分布的密度函數的特點是:關于μ對稱,在μ處達到最大值,在正(負)無窮遠處取值為0,在μ±σ處有拐點。它的形狀是中間高兩邊低,圖像是一條位于x軸上方的鐘形曲線,正態分布的密度函數表達式如下:

3.1.2 高斯模型處理RSSI的可行性
當目標節點在同一位置接收n次參考節點發來的RSSI值時,必然存在一些由于干擾而帶來的RSSI值的突變,但這是一個小概率事件,大部分采集來的RSSI值還是應該在平均值附近,因此,參考節點發來的RSSI值(隨機變量X)的概率服從高斯分布,即X~N(μ,σ2),因此,RSSI數據可以用高斯模型處理,其密度函數為式(3)。
在式(3)中:
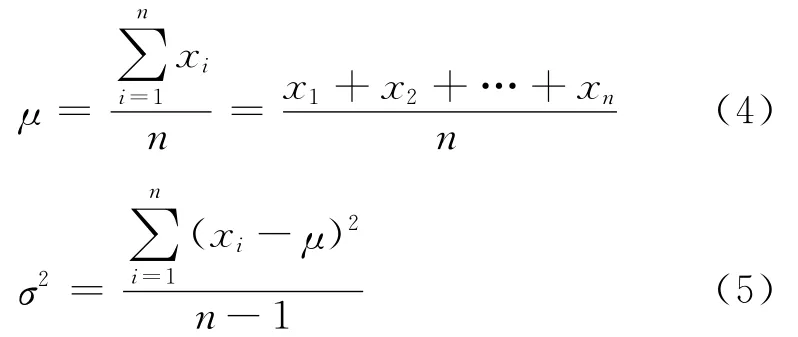
式中:xi——第i個信號強度值;
n——接收到的RSSI值個數。
3.1.3 用高斯模型處理數據方法
一個目標節點在同一位置收到的n個RSSI,其中,由于外部干擾的存在,必然存在著小概率事件,通過高斯模型選取高概率發生區的RSSI值,這種做法減少了一些小概率、大干擾事件對整體測量的影響,增強了定位信息的準確性。
高斯模型解決了RSSI在實際測試中易受干擾、穩定性差等問題,提高了定位精度,但是高斯模型只能消除小概率短暫的擾動,下面在用高斯模型處理RSSI數據的基礎上,再利用單傳感器分批估計融合理論對數據進行融合以期獲得RSSI最優值[4]。
3.2 單傳感器分批估計融合理論
3.2.1 算法的基本思想
提高單傳感器測量精度對整個檢測系統來說是至關重要的,因此,必須對單傳感器所測量的數據進行處理。一個參數有多個樣本觀測值是數據處理中常見情況,在工業測量過程中,傳感器參量相對于系統采樣頻率而言,一般是緩慢且具有正態分布的。將等精度測量數據分成兩組 (按照先后或者奇偶分組),根據分批估計理論可以得到測量數據的融合值[5-6]。
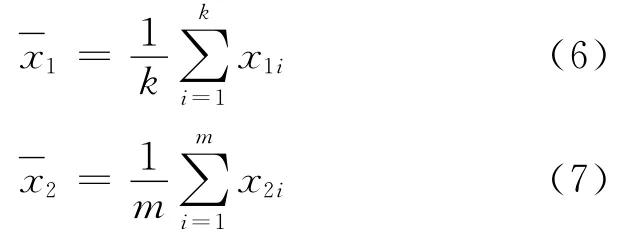
3.2.2 單個傳感器融合值的確定
將單只傳感器的n個觀測值x劃分成x11,x12,…,x1k和x21,x22,…,x2m,其中,k+m=n,(k,m≥2)。兩組樣本所對應的平均值分別為:
樣品方差分別為:


x的融合值和方差是:
3.3 定位算法
定位算法過程如下:
1)初始化各節點。
2)參考節點根據目標節點的請求向目標節點發送帶有位置坐標的信息,目標節點在收到RSSI值信息后,將其值記錄到對應的RSSI數組Beacon-val[n0]中,n0為選取記錄的數據個數。
3)目標節點運用高斯分布函數處理RSSI值,根據文中所研究的人員、物品定位系統的應用環境的總體情況,選擇0.5為臨界點,也就是說,當高斯分布函數值大于0.5時,認為對應的RSSI值為高概率發生值,小于或等于0.5所對應的RSSI值時,認為是小概率隨機事件,通過式(4)與式(5)可以求出μ與σ[2]。

由式(12)可以確定RSSI的選值范圍,按照此范圍目標節點從收到的n0個RSSI數據中選值,并存放到數組 Beacon-val-gaosi[n],n<n0中。
4)應用單傳感器分批估計融合理論,對經過高斯函數選取過的數組gaosi[n]中的RSSI值進行融合處理,數組 Beacon-val-gaosi[n]中n為高斯篩選后入選RSSI的個數。根據式(6)~式(11)得出的RSSI優化值為:

5)目標節點判斷收到的參考節點的個數是否超過3個,如果超過,則不再接收參考節點的信息,否則繼續接收。
6)用式(13)算出的RSSI值,根據式(2)算出目標節點到3個參考節點間的距離,再根據三角形質心定位法算出目標節點的坐標。
7)將算出的目標節點坐標經匯聚節點實時上傳到控制中心計算機[7-8]。
4 實 驗
4.1 測試模型建立
該系統以3個參考節點(Reference Node)構成邊長為60m的無線定位網絡。節點之間通過802.15.4/ZigBee無線通訊標準保持無線聯系,通過上位機軟件可以實現對全部參考節點的無線參數配置(例如,對參考節點的坐標配置)。
4.2 測試數據記錄及結果
測試數據記錄見表1。

表1 測試數據記錄
表中實際位置與指示位置的坐標誤差為

實際位置與指示位置的相對距離誤差為

η為定位精度,定位精度測算公式如下:

式中:n——測量次數;
Li——第i次實際位置與指示位置的相對距離誤差。
綜上所述,定位精度為:
5 結 語
在基于測距的定位算法中,為解決傳輸信號的RSSI值容易受到外界隨機干擾的影響,導致測量的距離值不準確而產生定位誤差的問題,文中提出了一種基于高斯分布函數及分批估計融合理論的無線傳感器網絡定位算法。該算法首先采用高斯模型分析RSSI,通過高斯模型剔除小概率事件RSSI的值,消除隨機干擾;然后再運用單傳感器分批估計融合理論計算高概率事件RSSI的值作為最終定位運算用的RSSI值,并將其送入目標節點CC2431的硬件引擎,確定目標節點的坐標。實驗證明,采用該種算法,系統定位精度能夠提高到0.5m以內,滿足物品定位精度的要求。
[1]張清國,黃竟偉,王敬華,等.一個新的無線傳感器網絡節點定位算法[J].小型微型計算機系統,2009(3):461-462.
[2]Ma Chunlong,Li Xiaoguang,Li Zhaoxi.Design of gas information collection and control system based on GPRS[C]// MEC,2011:1222-1224.
[3]何大宇,韋銥,徐英鵬.ZigBee無線傳感網絡的醫療應用研究[J].長春工業大學學報:自然科學版,2010,31(3):355-359.
[4]朱劍,趙海,孫佩鋼,等.基于RSSI均值的等邊三角形定位算法[J].東北大學學報:自然科學版,2007,28(8):1095-1096.
[5]Chunlong Ma,Jianguo Li,Shuhan Yu.Method of soil electrical conductivity measurement based on multi-sensor data fusion[C]// MEC,2011:1219-1221.
[6]Chunlong Ma,Shuyan Zhang,Jinli Wang.Electronics engineer combat training[M].Changchun:Jilin Publishing Group Press.,2010:253-260.
[7]付華,胡雅馨.無線傳感器網絡中基于RSSI的質心定位算法[J].微計算機信息,2010,26(8/1):19-20.
[8]王建宏,杜世順.基于無線傳感網絡的井下區域定位算法[J].煤礦機械,2010,31(12):189-190.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
