變電站智能巡檢機(jī)器人云臺(tái)控制系統(tǒng)設(shè)計(jì)
2012-10-12 13:28:18王海鵬王明瑞孫大慶
制造業(yè)自動(dòng)化 2012年1期
肖 鵬,王海鵬,曹 雷,王明瑞,孫大慶,曹 濤
XIAO Peng1, WANG Hai-peng1, CAO Lei2, WANG Ming-rui2, SUN Da-qing2, CAO Tao2
(1.山東電力研究院 國家電網(wǎng)電力機(jī)器人技術(shù)實(shí)驗(yàn)室,濟(jì)南 250002;2.山東魯能智能技術(shù)有限公司,濟(jì)南 250101)
0 引言
隨著科技進(jìn)步和電力體制改革的不斷深入和發(fā)展,電力系統(tǒng)自動(dòng)化程度已有了很大提高,很多變電站實(shí)現(xiàn)了遙測(cè)、遙信、遙控、遙調(diào)功能,為少人或無人值班變電站,但一定程度上都還存在因無人在現(xiàn)場(chǎng)及時(shí)監(jiān)視、巡視而帶來的一系列問題甚至留下隱患[1,2]。變電站智能巡檢機(jī)器人則可攜帶檢測(cè)設(shè)備對(duì)變電站內(nèi)電力設(shè)備進(jìn)行檢測(cè),在一定程度上解決了上述問題。變電站智能巡檢機(jī)器人對(duì)電力設(shè)備進(jìn)行檢測(cè)的工作流程為:首先機(jī)器人按預(yù)定路線運(yùn)行至指定位置;然后調(diào)用安裝于機(jī)器人頂部云臺(tái)的預(yù)置位功能,云臺(tái)帶動(dòng)檢測(cè)設(shè)備對(duì)準(zhǔn)待檢電力設(shè)備;最后采集電力設(shè)備狀態(tài)數(shù)據(jù)并通過無線網(wǎng)絡(luò)傳輸至監(jiān)控后臺(tái)。在整個(gè)檢測(cè)過程中,云臺(tái)處于承上啟下的位置,其性能直接影響到巡檢機(jī)器人完成巡檢任務(wù)的質(zhì)量。
由于各個(gè)變電站內(nèi)環(huán)境一般都不相同,并且待檢電力設(shè)備數(shù)量眾多,這就要求云臺(tái)具有控制靈活、適應(yīng)性強(qiáng)、預(yù)置位數(shù)量大、便于集成等特點(diǎn)。目前,云臺(tái)生產(chǎn)廠家的產(chǎn)品基本上都只有諸如64、128、256等這些有限數(shù)量的預(yù)置位且控制協(xié)議相對(duì)封閉,很多情況下無法滿足變電站現(xiàn)場(chǎng)多種功能實(shí)現(xiàn)的需要。針對(duì)巡檢任務(wù)對(duì)云臺(tái)性能需求的特殊性,本文設(shè)計(jì)了巡檢機(jī)器人云臺(tái)控制系統(tǒng),詳細(xì)描述了其軟硬件的設(shè)計(jì)過程。
1 系統(tǒng)特點(diǎn)及結(jié)構(gòu)
本文所述云臺(tái)本體采用模塊化設(shè)計(jì),結(jié)構(gòu)緊湊堅(jiān)固,具有IP67防護(hù)等級(jí),最大載重16Kg,運(yùn)行范圍水平為0°至365±2°,垂直為-20°至90°,齒輪嚙合間隙小于0.1°;云臺(tái)控制電路采用優(yōu)化的電路設(shè)計(jì)及合理抗干擾措施,保證了其能在惡劣的電磁環(huán)境中長(zhǎng)期穩(wěn)定運(yùn)行;系統(tǒng)軟件方面,采用了基于時(shí)間和事件觸發(fā)的混合式系統(tǒng)設(shè)計(jì)模式,并利用了自頂向下逐步求精的開發(fā)方法,保證了控制軟件的高可靠性和實(shí)時(shí)性;通過軟硬件的配合,實(shí)現(xiàn)了對(duì)云臺(tái)姿態(tài)的高精度控制、云臺(tái)運(yùn)行參數(shù)和狀態(tài)可在線設(shè)置和查詢、預(yù)置位多達(dá)1000個(gè)(硬件存儲(chǔ)時(shí))至無窮多個(gè)(需控制協(xié)議配合)等一系列功能,保證了巡檢機(jī)器人可靠高效的完成巡檢任務(wù)。整個(gè)控制系統(tǒng)的結(jié)構(gòu)如圖1所示。
圖1所示的云臺(tái)控制系統(tǒng)包含直流伺服電機(jī)、角度傳感器、硬件限位和云臺(tái)控制板4部分,它們分別負(fù)責(zé)云臺(tái)水平和垂直運(yùn)動(dòng)時(shí)的驅(qū)動(dòng)、位置反饋、行程保護(hù)和系統(tǒng)控制,整個(gè)系統(tǒng)采用機(jī)器人內(nèi)部24V電池供電,并通過RS485總線與機(jī)器人工控機(jī)連接,工控機(jī)負(fù)責(zé)轉(zhuǎn)發(fā)機(jī)器人監(jiān)控后臺(tái)下發(fā)的云臺(tái)控制指令至云臺(tái)控制板。

圖1 系統(tǒng)結(jié)構(gòu)示意圖
2 系統(tǒng)硬件設(shè)計(jì)
云臺(tái)控制系統(tǒng)硬件核心是云臺(tái)控制板,如圖2所示,其由微處理器模塊、電機(jī)驅(qū)動(dòng)模塊、角度采樣模塊、通信模塊及供電模塊五部分構(gòu)成。
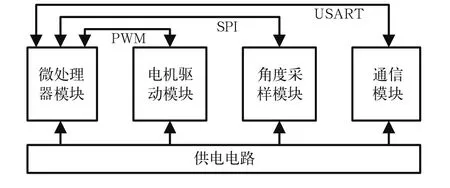
圖2 云臺(tái)硬件系統(tǒng)結(jié)構(gòu)示意圖
2.1 微處理器模塊
該模塊由ATmega128單片機(jī)與外圍IO電路構(gòu)成。ATmega128單片機(jī)是Atmel公司生產(chǎn)的一款高性能、低功耗的AVR?8位微處理器,具有先進(jìn)的RISC結(jié)構(gòu)和指令集,由于其單時(shí)鐘周期指令執(zhí)行時(shí)間,工作于16MHz時(shí)性能高達(dá)16MIPS[3]。單片機(jī)內(nèi)128K字節(jié)程序存儲(chǔ)器和4K字節(jié)EEPROM被分別用來存儲(chǔ)控制系統(tǒng)程序、系統(tǒng)參數(shù)和預(yù)置位數(shù)據(jù);該模塊利用片上PWM輸出口與電機(jī)控制模塊連接,云臺(tái)角度采樣模塊和通信模塊則分別與單片機(jī)SPI端口和串行口連接。
2.2 電機(jī)驅(qū)動(dòng)模塊
根據(jù)云臺(tái)負(fù)載條件,云臺(tái)水平和俯仰各伺服電機(jī)通過的最高電流可達(dá)2A,本文選用了美國國家半導(dǎo)體公司(NS)推出的專用于直流電動(dòng)機(jī)驅(qū)動(dòng)的H 橋驅(qū)動(dòng)芯片LMD18200。該芯片最高工作電壓可達(dá)55V,峰值輸出電流可高達(dá)6A,能持續(xù)輸出3A電流,并具有溫度報(bào)警和過熱保護(hù)功能[4],由于其集成了電機(jī)驅(qū)動(dòng)常用功能,可有效減少外圍電路原器件數(shù)量,有助于提高系統(tǒng)可靠性。該模塊原理圖如圖3所示(以水平方向的電機(jī)驅(qū)動(dòng)電路為例,垂直方向與水平方向電路相同)。

圖3 電機(jī)驅(qū)動(dòng)模塊原理圖
2.3 角度采樣模塊
由于云臺(tái)水平和垂直運(yùn)行角度采用模擬量反饋方式,因此需要對(duì)得到的模擬信號(hào)進(jìn)行AD轉(zhuǎn)換,雖然ATmega128單片機(jī)集成了片上AD轉(zhuǎn)換功能,由于其為10位分辨率,云臺(tái)水平運(yùn)動(dòng)時(shí)其角度分辨率最高約為0.36°(以一周365°計(jì)算,下同),因云臺(tái)機(jī)械傳動(dòng)精度小于0.1°,故不能達(dá)到所需定位精度。本文外擴(kuò)一片12位AD轉(zhuǎn)換芯片TLC2543,從而將云臺(tái)水平運(yùn)動(dòng)的角度分辨率提高至0.09°。TLC2543是TI公司的12位串行模數(shù)轉(zhuǎn)換器,使用開關(guān)電容逐次逼近技術(shù)完成A/D轉(zhuǎn)換過程,提供的最大采樣速率為66ksps,工作范圍內(nèi)10μs轉(zhuǎn)換時(shí)間,供電電流僅需1mA(典型值)[5],由于其數(shù)據(jù)傳輸使用SPI串行通訊端口,可以很方便的與ATmega128連接。
2.4 通信和供電模塊
通信和外圍供電電路設(shè)計(jì)主要從提高硬件電路抗干擾性出發(fā),對(duì)相關(guān)電路進(jìn)行優(yōu)化設(shè)計(jì),保證系統(tǒng)運(yùn)行的可靠性。通信模塊選擇了RS485通信方式,同時(shí)采用通信模塊電源與微處理器模塊電源隔離及信號(hào)傳輸光電隔離等手段,切斷干擾由通信線路傳輸至微處理器控制電路的通道,降低了干擾由通信線路引入的可能性。考慮到系統(tǒng)電源會(huì)受到云臺(tái)電機(jī)運(yùn)行時(shí)電刷換向及PWM輸出的干擾,通過增加PCB內(nèi)部電源層和地層、合理的元器件布局及增加去耦電容等方法予以抑制。
3 系統(tǒng)軟件設(shè)計(jì)
在硬件電路設(shè)計(jì)好后,系統(tǒng)軟件設(shè)計(jì)是最重要的部分,由于系統(tǒng)功能主要利用軟件實(shí)現(xiàn),這樣就使得硬件電路設(shè)計(jì)的簡(jiǎn)化和成本低可以得到實(shí)現(xiàn),同時(shí)也方便日后對(duì)系統(tǒng)功能的升級(jí)。系統(tǒng)軟件設(shè)計(jì)主要包含系統(tǒng)功能、控制算法和控制軟件的設(shè)計(jì)三部分。
3.1 系統(tǒng)功能設(shè)計(jì)
巡檢機(jī)器人在控制云臺(tái)過程中,一方面需要云臺(tái)能夠按要求動(dòng)作,另一方面也需要云臺(tái)滿足一些特殊的功能要求,如參數(shù)設(shè)置、運(yùn)行狀態(tài)監(jiān)控等。根據(jù)這些要求,云臺(tái)控制系統(tǒng)提供的主要功能有:云臺(tái)姿態(tài)調(diào)整、預(yù)置位設(shè)置及調(diào)用、直接數(shù)據(jù)控制、控制參數(shù)設(shè)置、控制精度補(bǔ)償、云臺(tái)運(yùn)行狀態(tài)查詢等。值得說明的是,“直接數(shù)據(jù)控制”功能是指云臺(tái)可以通過協(xié)議接收數(shù)據(jù)并運(yùn)動(dòng)至相應(yīng)姿態(tài)的一種云臺(tái)控制方式,云臺(tái)預(yù)置位可獨(dú)立于云臺(tái)控制板存儲(chǔ),因此允許預(yù)置位以任意方式存儲(chǔ)于任意位置,而預(yù)置位個(gè)數(shù)也可達(dá)到無限多個(gè)。
為方便系統(tǒng)功能的使用,本文開發(fā)了一套私有的云臺(tái)控制協(xié)議,巡檢機(jī)器人可通過該控制協(xié)議訪問云臺(tái)控制系統(tǒng)功能,此外本文所述云臺(tái)控制系統(tǒng)也支持其它標(biāo)準(zhǔn)云臺(tái)控制協(xié)議,如:PELCO_D、PELCO_P等,因此其也可應(yīng)用于一般安防監(jiān)控領(lǐng)域。控制系統(tǒng)私有協(xié)議幀格式如圖4所示。

圖4 云臺(tái)控制協(xié)議幀格式
圖4所示幀長(zhǎng)度固定為9個(gè)字節(jié),其中: SYN字節(jié)為同步字節(jié),以指示協(xié)議的開頭;ADR為地址字節(jié),用以支持總線上的多個(gè)云臺(tái)的識(shí)別;C1和C2節(jié)為功能字節(jié),該字節(jié)表明當(dāng)前云臺(tái)需要完成的要功能;D1至D4為數(shù)據(jù)字節(jié),包含了功能所需的標(biāo)志或參數(shù);CHK字節(jié)為校驗(yàn)字節(jié)。
3.2 控制算法設(shè)計(jì)
云臺(tái)控制主要是對(duì)云臺(tái)運(yùn)行速度和姿態(tài)的控制。由于無速度反饋,因此云臺(tái)運(yùn)行速度控制為開環(huán)控制,水平和垂直運(yùn)行速度直接由PWM脈寬占空比給出,而云臺(tái)姿態(tài)控制則需要根據(jù)水平和垂直方向上的角度反饋閉環(huán)進(jìn)行。為精確的控制云臺(tái)姿態(tài),文本使用了PID控制方法,其離散的PID控制律為

式中:u(k)為k時(shí)刻控制器的輸出量;KP、KI、KD分別為比例系數(shù)、積分系數(shù)和微分系數(shù);e(k)為當(dāng)前時(shí)刻的云臺(tái)水平(垂直)方向當(dāng)前角度值與期望值之差;e(k-1)為上次采樣時(shí)刻的云臺(tái)水平(垂直)方向角度值與期望值之差。
在PID控制中,積分環(huán)節(jié)的作用是消除穩(wěn)態(tài)誤差,提高系統(tǒng)的控制精度。對(duì)于本控制系統(tǒng),由于直接利用角度偏差進(jìn)行控制,角度偏差在控制開始階段較大,如果此時(shí)引入積分環(huán)節(jié)就會(huì)造成PID的積分累積,導(dǎo)致系統(tǒng)超調(diào)較大,不利于云臺(tái)動(dòng)作的穩(wěn)定性。因此,本文針對(duì)控制系統(tǒng)的特點(diǎn),采用了積分分離PID控制,控制算法的執(zhí)行流程如圖5所示。

圖5 控制系統(tǒng)積分分離PID計(jì)算流程
圖5中當(dāng)系統(tǒng)偏差e(k)絕對(duì)值大于ε(設(shè)定的偏差閾值)時(shí),取消積分環(huán)節(jié),采用PD控制,避免由于積分累積引起系統(tǒng)較大的超調(diào);當(dāng)e(k)小于等于ε時(shí),引入積分環(huán)節(jié),采用PID控制,以消除穩(wěn)態(tài)誤差,提高控制精度。積分分離PID控制算法可表示為

式中,α為積分項(xiàng)的開關(guān)系數(shù),當(dāng)|e(k)|>ε時(shí)取1,否則取0。
3.3 控制軟件設(shè)計(jì)
對(duì)云臺(tái)運(yùn)行過程分析可知,云臺(tái)角度采樣和電機(jī)控制是控制系統(tǒng)始終需要關(guān)注的核心功能,與其相關(guān)的代碼應(yīng)由系統(tǒng)周期性地執(zhí)行。另一方面,控制系統(tǒng)也需要處理一些隨機(jī)性事件,如:與外部通信、異常事件輸入等。為此云臺(tái)控制系統(tǒng)采用了基于時(shí)間和事件觸發(fā)的混合式系統(tǒng)架構(gòu),一個(gè)周期性執(zhí)行的系統(tǒng)任務(wù)完成電機(jī)控制、角度采樣、系統(tǒng)狀態(tài)采集等功能,而其它隨機(jī)性事件則交由各自的中斷處理例程處理。控制軟件主要包含采樣控制程序和通信解碼程序,其程序執(zhí)行流程如圖6所示。
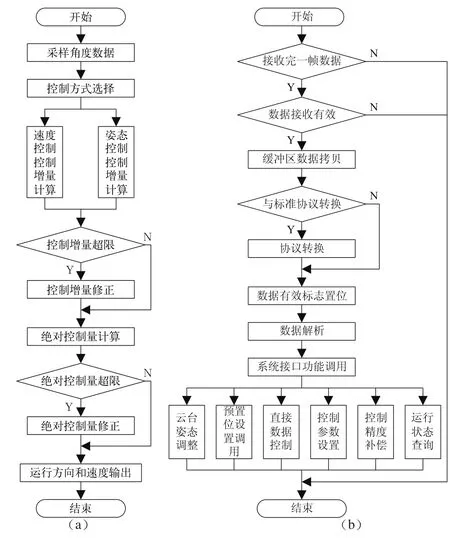
圖6 控制系統(tǒng)的核心功能軟件流程圖
圖6(a)所示流程中,考慮到云臺(tái) “速度控制”為開環(huán)控制,而“姿態(tài)控制”為閉環(huán)控制,兩種控制量增量的計(jì)算方式不同,程序流程中對(duì)此進(jìn)行了判斷并分別處理;為了保證云臺(tái)平穩(wěn)精確的運(yùn)行,需要對(duì)系統(tǒng)運(yùn)行的加速度和速度進(jìn)行限制,在程序流程中是通過對(duì)控制量增量和絕對(duì)控制量的限制予以實(shí)現(xiàn)。在具體實(shí)現(xiàn)上,由單片機(jī)定時(shí)器產(chǎn)生一個(gè)周期性的定時(shí)器中斷,本程序流程代碼在中斷處理程序中執(zhí)行。圖6(b)為由串口中斷接收完一幀數(shù)據(jù)后的解碼執(zhí)行流程,其主要完成了數(shù)據(jù)校驗(yàn)、緩沖區(qū)數(shù)據(jù)拷貝,協(xié)議轉(zhuǎn)換和系統(tǒng)功能調(diào)用功能。
4 實(shí)驗(yàn)
本實(shí)驗(yàn)主要目的是驗(yàn)證云臺(tái)控制精度,防止因控制精度不夠?qū)е碌脑婆_(tái)姿態(tài)不準(zhǔn)的情況。實(shí)驗(yàn)中先將裝有可見光攝像機(jī)的云臺(tái)固定于云臺(tái)底座上;之后調(diào)整云臺(tái)姿態(tài),使攝像機(jī)對(duì)準(zhǔn)預(yù)先安放標(biāo)志物并設(shè)定預(yù)置位(為便于后續(xù)計(jì)算,此時(shí)的攝像機(jī)處于水平位置),同時(shí)采集攝像機(jī)圖片并記錄此時(shí)的水平和垂直角度AD采樣值分別為3105和1945;然后再控制云臺(tái)使攝像機(jī)偏移后再調(diào)用該預(yù)置位,當(dāng)云臺(tái)運(yùn)行到位后再次讀取角度AD采樣值并與之前采樣值相減,取絕對(duì)值后得到控制誤差。連續(xù)測(cè)試5次后采集到得數(shù)據(jù)如表1所示,測(cè)試中使用了三星SDZ-375攝像機(jī),其鏡頭與標(biāo)志物距離為17m,采集圖像由攝像機(jī)放大37倍。
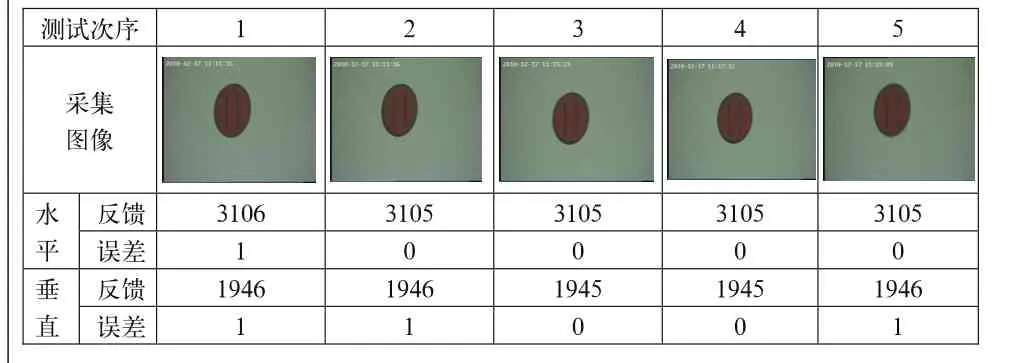
表1 云臺(tái)控制精度測(cè)試
從上面得到的結(jié)果看,各個(gè)圖像偏離程度基本一致,且得到的控制誤差基本一致,其1個(gè)AD采樣單位的跳動(dòng)(AD采樣值變化1)為AD量化誤差(系統(tǒng)誤差),由此可知云臺(tái)控制可以達(dá)到較高的精度。
5 結(jié)論
綜上所述,本文設(shè)計(jì)的云臺(tái)控制系統(tǒng)控制精度良好,云臺(tái)姿態(tài)準(zhǔn)確,可以完全滿足巡檢機(jī)器人對(duì)云臺(tái)性能的要求。另外云臺(tái)控制系統(tǒng)結(jié)構(gòu)簡(jiǎn)單、運(yùn)行可靠,保證了巡檢機(jī)器人可靠高效的完成巡檢任務(wù),同時(shí)得益于模塊化的控制軟件設(shè)計(jì),系統(tǒng)軟件升級(jí)方便,可以更好的適應(yīng)今后巡檢機(jī)器人系統(tǒng)對(duì)云臺(tái)系統(tǒng)提出的不同種類的需求。
[1]魯守銀,錢慶林,張斌,等.變電站設(shè)備巡檢機(jī)器人的研制[J].電力系統(tǒng)自動(dòng)化,2006,30(13):94-98.
[2]李向東,魯守銀,王宏,等.一種智能巡檢機(jī)器人的體系結(jié)構(gòu)分析與設(shè)計(jì)[J].機(jī)器人,2005,27(6):502-506.
[3]Atmel Corporation.ATmega128 Datasheet[DB/OL].Revision V,updated 2/11.
[4]Texas Instruments Corporation.TLC2543 Datasheet[DB/OL].2001.
[5]National Semiconductor Corporation.LMD18200 Datasheet[DB/OL].2005.
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
電子制作(2018年8期)2018-06-26 06:43:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
中國科技論壇(2017年7期)2017-07-25 08:49:53
電子制作(2017年8期)2017-06-05 09:36:15
現(xiàn)代工業(yè)經(jīng)濟(jì)和信息化(2016年5期)2016-05-17 05:35:57
河南電力(2015年5期)2015-06-08 06:01:45
