基于LabVIEW的汽車ABS試驗臺測控系統
2012-10-12 13:28:30朱善同孫躍東
制造業自動化 2012年4期
朱善同,周 萍,孫躍東
ZHU Shan-tong, ZHOU Ping, SUN Yue-dong
(上海理工大學 機械工程學院,上海 200093)
0 引言
隨著汽車的高速發展以及汽車動力性能的不斷提高,客觀上對汽車制動的安全性能也提出了越來越高的要求。汽車ABS是在傳統制動系統的基礎上采用電子控制技術,在制動時防車輪抱死的一種機電一體化系統[1],由于對汽車行駛安全影響很大,因此需要建立一套測控系統來檢測其性能的好壞。
虛擬儀器系統是對傳統儀器的重大突破,是測控系統與計算機結合的產物。使用LabVIEW軟件可以有效的滿足對數據采集、處理分析、監控和顯示需要,并且使系統具有很好的靈活性和擴展性。通過LabVIEW可以建立一套界面友好、簡單直觀的現場數據監控、功能強大的測控系統[2]。
1 ABS測控系統
1.1 ABS測控系統的結構組成
本文汽車ABS試驗臺主要用于檢測和開發ABS的試驗。其系統結構示意圖如圖1所示。
整個系統主要由上位機、PCI-8320數據采集卡、轉速傳感器、磁粉離合器、汽車ABS制動系統、功率放大器、變頻器控制器和F/V變換器等組成。
1.2 ABS測控系統的工作原理
試驗臺采用交流電動機進行驅動運轉,電動機轉速的調整用于實現車速的模擬,車輛的慣量通過安裝的飛輪模擬,控制磁粉離合器傳遞的扭矩實現地面對車輪制動力及車輛部分轉動慣量模擬。
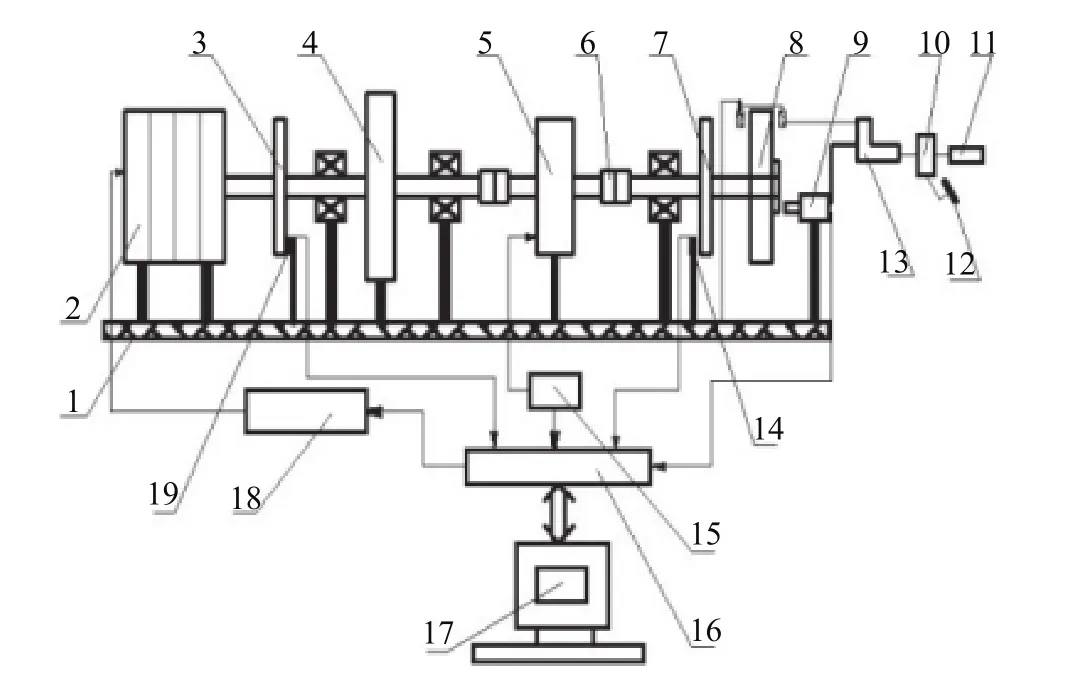
圖1 ABS測控系統結構示意圖
對汽車實際行駛下的車輪進行受力分析則有

通過對試驗臺的設計分析,汽車車輪的運動用試驗臺上的制動盤來模擬,試驗臺所受力矩平衡方程為

在試驗臺上測得的車輪制動力與整車制動力的比例為k,則有

其中J輪為車輪轉動慣量,為車輪的角減速度,M制制為制動器制動力矩, Fb為路面對車輪的制動力,r為車輪滾動半徑, M電為磁粉離合器傳遞力矩,J臺為制動盤轉動慣量, 為汽車旋轉質量換算系數。
試驗臺中車輪由制動盤模擬,所以車輪的角減速度等于模擬部分角減速度,即有 = ',綜合以上得試驗臺上磁粉離合器傳遞力矩數學表達式為

本文車速模擬是以下面兩個公式為依據:
系統在一設定制動的初速度V0以后,輪速通過傳感器傳遞給數據采集卡,計算機通過采集的輪速信號進而計算得到 ,根據(5)和(6)式計算得出 Vt和Vn,得到實時的模擬車速。
系統硬件結構框圖如圖2所示。

圖2 測控系統硬件結構框圖
2 系統軟件設計與實現
本系統選擇美國NI公司的LabVIEW2009作為開發平臺。LabVIEW是一種用圖表代碼代替編程語言創建應用程序的開發工具[3]。它采用數據流編程方法才描述程序的執行,用圖形語言、圖表和連線代替文本的形式編程,與VB、VC等高級語言一樣,是一種帶擴展庫函數的通用程序開發系統,可方便地設計出符合用戶需求的應用程序。
根據設計要求,將系統的軟件分為控制模塊、測量模塊、數據處理模塊和輔助功能四個模塊。模塊化使程序結構清晰,針對不同的測試對象,編程各自的子模塊,每個子模塊可以單獨使用,也可以提供給子程序調用,組成虛擬主控面板。圖3為系統軟件的結構和功能框圖。
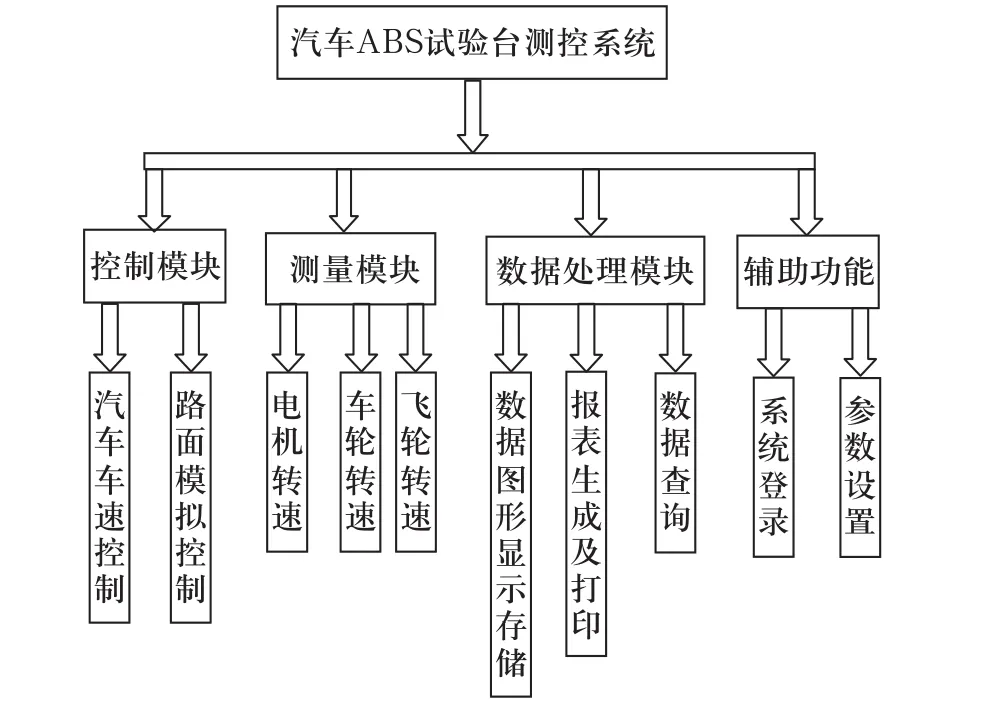
圖3 測控系統軟件結構和功能框圖
2.1 系統測量模塊設計
測控系統測量模塊的主要作用是采集到更為精確的車速和輪速信號。其中輪速主要通過輪速傳感器收集到信號獲取,模擬車速則通過對電動機轉速的測量換算后模擬得出。在轉速信號的采集過程中碰到一些信號干擾問題,汽車運行環境復雜、傳感器為弱電系統、齒圈和傳感器存在振動,都可能產生干擾信號,所以需要通過程序進一步剔異常信號[4]。其程序如圖4所示。
2.2 系統控制模塊設計
測控系統控制模塊主要實現對電動機的閉環控制和磁粉離合器的開環控制。通過采集卡采集試驗過程中的實時數據,經過計算機計算分析后,向電動機和磁粉離合器發出控制信號,實現對電動機和磁粉離合器的控制。
2.2.1 電動機數字式PID控制設計
為了使測試系統達到一個較好的控制效果,選用PID控制調節電動機的轉速。PID控制是一種發展較早的控制策略,其具有算法簡單、適應性廣、魯棒性強、可靠性高和使用方便特點,廣泛應用于工業控制領域[5]。數字PID算法又分為位置式PID控制算法和增量式PID控制算法[6]。位置式PID算法表達式為:
其中k為采樣序號,k=0,1,2,…;
u(k)為第k次采樣時刻的計算機輸出值;
e(k)為第k次采樣時刻輸入的偏差值,e(k)=r(k)-y(k);
e(k-1)為第(k-1)次采樣時刻輸入的偏差值。
如果按(1)式確定輸出量的控制算法,需要對e(k)進行累加,運算量大,因此采用增量式PID控制算法。
根據(1)式,應用遞推原理可得:
式中 u(k)=u(k)-u(k-1), e(k)=e(k)-e(k-1)。
可將式(2)進一步改寫為:

式中A=Kp(1+T/Ti+Td/T), B=Kp(1+2Td/T), C= KpTd/T。
A、B、C都是與采樣周期、比例系數、積分時間常數和微分時間常數有關的數。
采用增量式PID算法時,計算輸出的控制量u(k)對應的是本次執行機構位置的增量,其實際控制量可利用算式u(k)=u(k-1)+u(k)通過軟件來完成。利用LabVIEW軟件在完成程序編輯后,將傳遞函數進行設置即可對程序進行調試,用鼠標可以方便地拖動參數Kp、Ki、Kd的滑動按鈕,進而達到調整它們大小的目的,使輸出的階躍響應達到了預期的效果。電動機控制模塊程序如圖5所示。
2.2.2 磁粉離合器的控制設計
根據試驗臺上推導出的磁粉離合器計算公式,在調試過程中發現,在對磁粉離合器的控制節點上采用高7位就可以。而為了能夠很好地控制磁粉離合器,就必須對低位進行控制。通過試驗得到的節點低位和磁粉離合器控制電壓的數據如表1所示。設磁粉離合器電壓為U磁,磁粉離合器控制節點低位為x,則得兩者關系為U磁=0.0008x2-0.0008x-2.2861。
用戶自定義的測試參數,如磁粉離合器的系數,控制輸入信號通過脈寬調制輸出一定頻率的脈沖,此脈沖經放大后推動功率電路,再經過電壓變換,輸出一定的電壓值,經過整流和穩流電路輸出恒定電流,為磁粉離合器提供激磁電流。磁粉離合器控制模塊如圖6所示。

表1 磁粉離合器節點低位值與控制電壓關系
圖5 電動機控制模塊程序
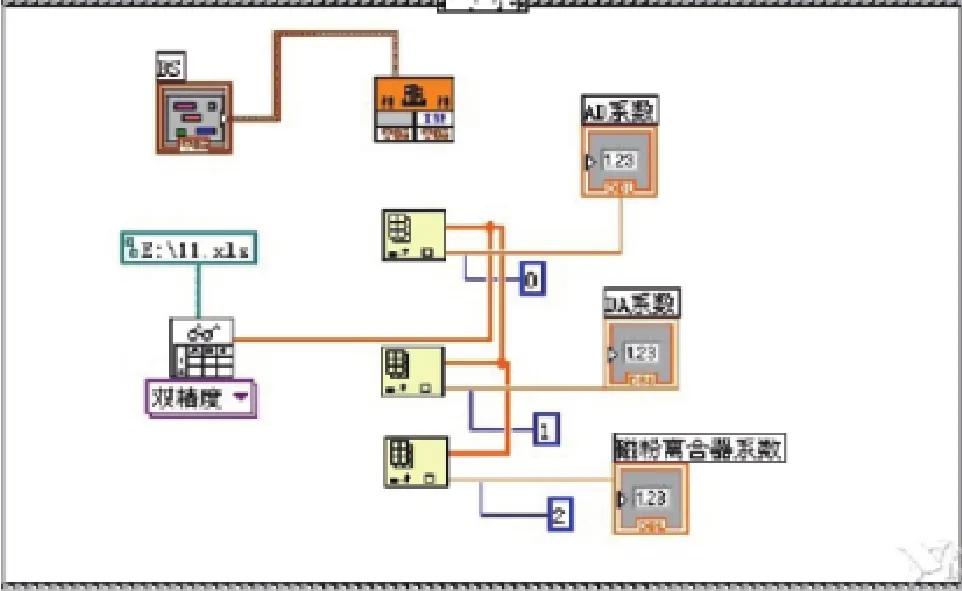
圖6 磁粉離合器控制程序
2.3 數據處理模塊設計

圖7 數據讀取顯示程序圖
在程序執行過程中需要對數據進行實時的顯示,因此需要通過采用數組工具和讀寫工具結合編程的方法來實現。其程序如圖7所示,主要讀取的數據包括電動機模擬的車速、前后車輪的轉速,而主要顯示的數據包括設定的目標車速、設定的路面附著系數、汽車制動時實時讀取的車速、車輪的轉速。
2.4 測控系統流程設計
測控程序軟件設計流程圖如圖8所示。首先通過調用儀器的驅動程序來連接虛擬儀器測控系統,連接成功后進行系統初始化,設置測試過程中所要求的參數,即選擇附著系數值、汽車初始速度值等。當汽車在檢測試驗臺上達到給定速度,指示駕駛員踩制動踏板,測控程序對傳感器傳來的轉速、轉矩對應的頻率信號進行采集,并經軟件處理,處理分為兩部分:一是對采集的數據進行運算分析,得到下一時刻能量補償量,來控制變頻器的輸出頻率;二是將采集的轉速數據經過分析和運算,得到車輪轉速,進行記錄存儲。最后顯示計算結果并繪制車輪轉速曲線,送至用戶界面。
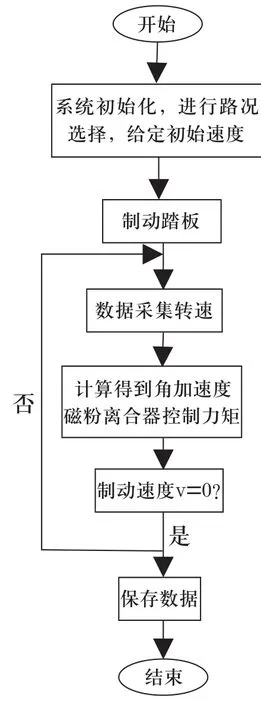
圖8 測控程序流程框圖
3 試驗結果及分析
系統程序開發以后需要對系統進行調試,主要任務是對PID環節的參數整定。最后確定制動程序:Kp= 50,Ki= 290,Kd= 1.70。部分實驗結果如圖9所示。圖9(a)為左右車輪附著系數0.7,圖9(b)為左右車輪附著系數0.5,圖9(c)為左右車輪附著系數0.3,圖9(d)為左右車輪附著系數分別為0.7、0.5,圖9(e)為左右車輪附著系數分別為0.7、0.3,圖9(f)為左右車輪附著系數分別為0.5、0.3。
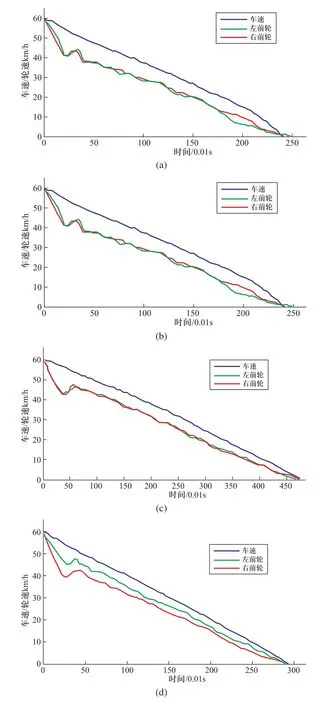
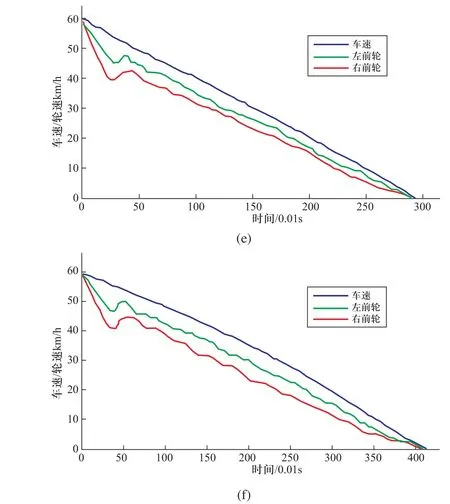
圖9 試驗結果圖
在理論上,左前輪和右前輪的曲線應該保持一致,從圖中可以看出左前輪和右前輪的輪速曲線并沒有重合,這主要是由于試驗臺的制造誤差引起的。由于電動機輸出轉矩是分別通過前軸的兩個磁粉離合器并經聯軸器輸入給車輪的,所以轉矩并不是在同一根軸上傳遞,這也導致了左右輪速曲線的差異。但是可以看出車速在ABS作用下均勻下降,左右輪速在小于車身速度出不斷波動,車輪在ABS工作區域內沒有發生抱死,達到了制動安全的要求。
4 結束語
針對汽車ABS系統安全與可靠性要求,本文基于LabVIEW設計開發了一套汽車ABS試驗臺及其測控系統,并進行了試驗。本文開發的測控系統動態性能滿足系統要求并具有參數的測試功能和數據分析處理功能,實現了測控的自動化,為進一步研究和開發ABS系統奠定基礎。
[1]李果. 車輛防抱死制動控制理論與應用[M]. 北京: 國防工業出版社, 2009.
[2]劉海泉, 肖世德, 陳翀. 基于LabVIEW的汽車EPS試驗臺測控系統[J].控制工程, 2009, 16(5).
[3]LabVIEW. LabVIEW Measurements Manual[DB]. Austin:National Instruments Corporation, 2000.
[4]Fangjunm,Zhiqiang Gao.An Adaptive Non-Linear Filter Approach to the Vehicle Velocity Estimation for ABS[EB/OL]. http:/www.nsti.gov.cn, 2005-02-16.
[5]趙雙, 孫仁云, 寧凡坤. 汽車ABS控制算法的研究[J]. 機械設計與制造. 2005, (2).
[6]王仲生, 陳東. 智能檢測與控制技術[M]. 西安: 西北工業大學出版社, 2002, 9: 303-305.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
汽車與安全(2019年9期)2019-11-22 09:48:03
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
決策探索(2014年21期)2014-11-25 12:29:50
