電機(jī)轉(zhuǎn)速傳感器高精度檢測裝置的研究
2012-10-12 13:28:32吳房勝余華益陳業(yè)麗
制造業(yè)自動(dòng)化 2012年4期
關(guān)鍵詞:檢測
吳房勝,余華益,張 翔,陳業(yè)麗
WU Fang-sheng1, YU Hua-yi2, ZHANG Xiang3, CHEN Ye-li4
(1. 安徽新華學(xué)院 電子通信工程學(xué)院,合肥 230088;2. 安徽安凱福田曙光車橋有限公司,合肥 230051;3. 合肥美亞光電,合肥 230088;4. 安徽霍山縣與兒街中學(xué),六安 237200)
0 引言
電動(dòng)機(jī)占我國電力損耗非常大,其能效檢測設(shè)備必不可少,而這種檢測設(shè)備主要是對轉(zhuǎn)速特性的檢測,即轉(zhuǎn)速傳感器。為確保準(zhǔn)確度,轉(zhuǎn)速傳感器自身的技術(shù)指標(biāo)是否達(dá)到精度要求還無法檢測。本文設(shè)計(jì)了一套設(shè)備,將嵌入式與數(shù)字圖像處理技術(shù)相結(jié)合,實(shí)現(xiàn)高精度自動(dòng)對中,保證連接同心度,其精度遠(yuǎn)遠(yuǎn)高于傳感器的精度,因此可用來檢測轉(zhuǎn)速傳感器是否達(dá)標(biāo)。
1 系統(tǒng)概述
本裝置如圖1所示,左側(cè)為驅(qū)動(dòng)部分,工業(yè)相機(jī)安裝在驅(qū)動(dòng)主軸上,電機(jī)帶動(dòng)驅(qū)動(dòng)主軸旋轉(zhuǎn);中間為自動(dòng)對中部分,相機(jī)拍攝圖片,進(jìn)行自動(dòng)對中并自動(dòng)聯(lián)接;右側(cè)為被測件安裝板,用來安放被測傳感器,伺服電機(jī)帶動(dòng)被測件安裝板,完成對中附件的精確移動(dòng)。自動(dòng)對中完成后,再將左側(cè)驅(qū)動(dòng)部分與右側(cè)被測部分自動(dòng)精確聯(lián)接,避免人為操作誤差。
對中附件如圖2所示,工業(yè)相機(jī)對附件中間小黑塊連續(xù)拍攝,進(jìn)行圖像采樣,將數(shù)據(jù)反饋給控制芯片,控制芯片確定對中位置與中心距的偏移,再控制對中附件上下,左右,旋轉(zhuǎn)等移動(dòng),實(shí)現(xiàn)高精度自動(dòng)對中。該附件為白色背景,中央為黑色矩形,控制芯片采用S3C2440,拍攝到圖像后,嵌入式采集卡采集相機(jī)拍攝的信息,將其傳給ARM進(jìn)行數(shù)據(jù)處理,最后利用伺服電機(jī)控制安裝板移動(dòng)的方向和位移。同時(shí),ARM端口采集光電傳感器的信號(hào),反饋給控制中心,然后不間斷比較實(shí)際轉(zhuǎn)速與設(shè)定轉(zhuǎn)速的差值,不停的向伺服電機(jī)發(fā)出指令,調(diào)節(jié)轉(zhuǎn)速,形成一個(gè)閉環(huán)控制,直到實(shí)際轉(zhuǎn)速達(dá)到設(shè)定轉(zhuǎn)速。最后比較驅(qū)動(dòng)轉(zhuǎn)速與被測傳感器上顯示的轉(zhuǎn)速的差值,如差值大與規(guī)定值,為不合格產(chǎn)品。
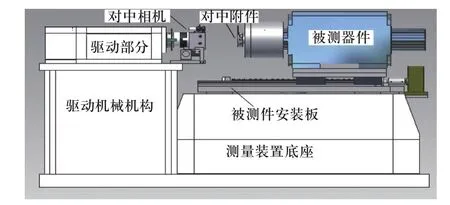
圖1 裝置結(jié)構(gòu)圖

圖2 對中附件
2 基本理論
2.1 轉(zhuǎn)速的測量
驅(qū)動(dòng)轉(zhuǎn)速測量時(shí),光電編碼圈安裝在驅(qū)動(dòng)主軸上,驅(qū)動(dòng)主軸帶動(dòng)光電編碼圈一起旋轉(zhuǎn),光電編碼圈上的凸齒切割光電轉(zhuǎn)速傳感器的紅外線。每通過一個(gè)凸齒,傳感器記錄一個(gè)脈沖。脈沖信號(hào)送到控制芯片,ARM芯片結(jié)合時(shí)間參數(shù)和收到的信號(hào)數(shù)量計(jì)算當(dāng)前的實(shí)際轉(zhuǎn)速。根據(jù)指標(biāo)要求,最高轉(zhuǎn)速6000r/min和不確定度0.03%,將光電編碼圈分成30等份,根據(jù)f = n×N (f為信號(hào)頻率;n為轉(zhuǎn)速,單位為r/second;N為光電編碼圈分度值),可得信號(hào)頻率最高3KHz,故選擇SICK公司的WF5T-B4210。
2.2 數(shù)字圖像處理
在拍攝系統(tǒng)中,利用工業(yè)相機(jī)將靜止或運(yùn)動(dòng)的對中附件圖像拍攝下來。在圖像采集、傳輸時(shí),不可避免地受到外界甚至人為因素的影響,使得所拍的對中圖像效果不理想。為消除這些噪聲干擾,本裝置采用領(lǐng)域平均法對圖像濾波。數(shù)學(xué)公表達(dá)為:式中,f (m, n)為給定的噪聲圖像,g (x, y)為領(lǐng)域平均處理后的圖像。濾波后,再對圖像邊緣檢測,突出邊緣信息,以利于機(jī)器識(shí)別。本系統(tǒng)采用Sobel算子對附件圖像進(jìn)行邊緣檢測。該算子是以圖像中某一個(gè)像素為中心, 截取一個(gè)3×3像素的窗口,然后分別計(jì)算窗口像素在水平和垂直方向上的偏導(dǎo)。
本裝置采用ARM,其處理能力不如電腦,對圖像分割時(shí),提出了一種簡單的基于圖像邊緣的分割法。算法如下:由于圖片背景只有黑白兩種顏色,對比度相當(dāng)明顯,所以首先利用邊緣檢測技術(shù),對圖像進(jìn)行二值化處理,通過迭代運(yùn)算得到圖像的平均灰度值,再將平均灰度值作為閥值,大于閥值的像素點(diǎn)為圖像邊緣,灰度值設(shè)定為255,小于或等于閥值的像素點(diǎn)灰度值設(shè)定為0,這樣就可將邊緣圖像分離出來。
圖像數(shù)字處理后,即開始自動(dòng)對中,在圖2中,如果黑色方塊不在相機(jī)拍攝范圍的中心位置,并與拍攝范圍的邊界有一角度。為將黑色方塊精確移到拍攝中心區(qū)域,先驅(qū)動(dòng)控制轉(zhuǎn)角的電機(jī)進(jìn)行角度校正。等到圖像兩邊界線與拍攝區(qū)域兩邊界線分別平行時(shí),計(jì)算黑色校正方塊四條邊界離拍攝區(qū)域相對應(yīng)的四條邊界的垂直距離,采樣的距離長度以及移動(dòng)的位移可以按一個(gè)像素(0.005mm)為單位進(jìn)行計(jì)算,再利用水平方向電機(jī)與垂直方向電機(jī)進(jìn)行左右和上下位置的調(diào)整,使黑色矩形方塊和拍攝區(qū)域的左右邊距相等,上下邊距也相等,最終完成高精度自動(dòng)對中。
3 軟硬件設(shè)計(jì)
該系統(tǒng)的硬件采用ARM芯片S3C2440,主要實(shí)現(xiàn)電機(jī)轉(zhuǎn)速檢測、自動(dòng)對中和界面顯示與操作等功能。系統(tǒng)硬件框圖如圖3所示。軟件設(shè)計(jì)采用模塊化、子程序化,便于程序的調(diào)試、移植和修改,主流程如圖4所示。
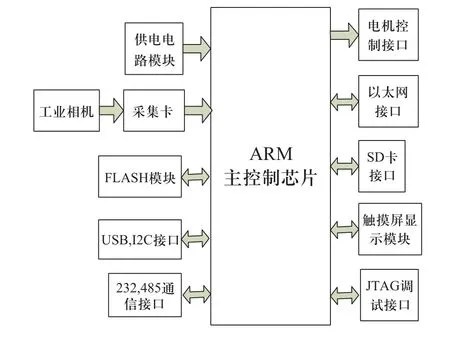
圖3 硬件框圖
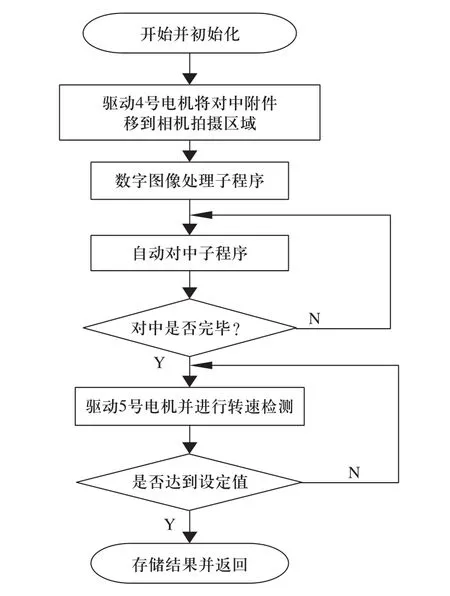
圖4 主流程圖
4 測量結(jié)果
系統(tǒng)運(yùn)行時(shí),首先采集附件上的原始圖片,如圖5所示。從圖中可看出,圖像不在視頻范圍的正中央,左邊界距離小于右邊界距離,上邊界距離小于下邊界距離,角度上也有一定程度的偏差。采集到對中附件圖片后,對圖片進(jìn)行數(shù)字圖像處理,最終實(shí)現(xiàn)自動(dòng)對中,對中后的圖片如圖6所示。對中后,圖像左右邊、上下邊距均相等,角度偏差為零,完成了附件圖片的中心線與驅(qū)動(dòng)部分的中心線相重合,達(dá)到精確自動(dòng)對中功能。其測試界面如圖7所示。

圖5 原始圖片
整體速度測定方面,技術(shù)指標(biāo)要求測量裝置的轉(zhuǎn)速特性的準(zhǔn)確度等級應(yīng)等于或高于±0.03%FS。測試結(jié)果如下:電機(jī)測量范圍:(3006000)r/min;轉(zhuǎn)速不確定度:0.019%;自動(dòng)對中能力:0.08mm,測量范圍寬,自動(dòng)對中精度高,滿足檢測需求,符合國家檢定標(biāo)準(zhǔn)。
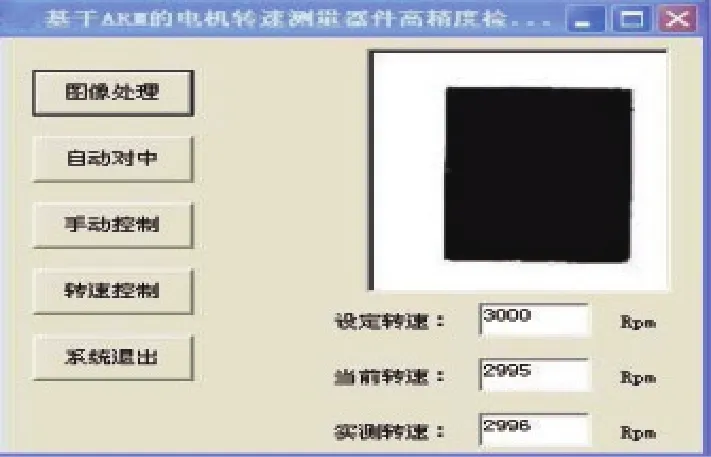
圖7 測試界面
[1]印保靖, 等. 轉(zhuǎn)矩轉(zhuǎn)速測量裝置轉(zhuǎn)速特性檢測方法的研究[J]. 上海計(jì)量測試, 2006, (6): 14-16.
[2]連錦湮. 機(jī)器計(jì)算機(jī)視覺的應(yīng)用—打孔機(jī)影像定位系統(tǒng)設(shè)計(jì)[J]. 今日電子, 2006: 83.
[3]岡薩雷斯. 數(shù)字圖像處理(MATLAB版)[M]. 北京: 電子工業(yè)出版社, 2006: 17-18.
[4]胥靜. 嵌入式系統(tǒng)設(shè)計(jì)與開發(fā)實(shí)例詳解[M]. 北京: 北京航空航天大學(xué)出版社, 2005.
猜你喜歡
中國設(shè)備工程(2022年12期)2022-07-11 04:33:00
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:36
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:34
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:50
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:48
