新型可變距式救援機器人結構設計及分析
2012-10-16 10:09:14鄭書華吳明昊黃葉浩尚偉燕葉川崎
制造業自動化 2012年20期
鄭書華,吳明昊,黃葉浩,尚偉燕,葉川崎
( 1.寧波工程學院 機械學院,寧波 315016;2.寧波大學 信息科學與工程學院,寧波 315211)
0 引言
近年來全球氣候變化莫測,自然災害頻頻發生,08年汶川地震、10年玉樹地震、11年日本地震引發海嘯等,這些自然災難以及諸多人為災難均造成人員的重大傷亡和財產的重大損失,因此,在災害發生之后,如何迅速而有效地展開救援工作就顯得尤為重要。執行特殊任務的救援機器人是一種加裝各種救援設備、測量儀器和探測系統的智能作業車輛[1,2]。它具有體積小、隱蔽性好、快速反應、機動性好、生存能力強和成本低等特點,并且可以通過遠程遙控甚至自主完成部分原本由人完成的任務,能夠大大減少復雜工作環境下人員的損耗并提高救援效率[3,4]。因此,適應各種復雜環境的救援機器人的設計顯得尤為重要。根據救援區域復雜的結構特點和要求,本文將對可變距救援機器人進行設計。
1 機器人行走機構的方案擬定
面對復雜的救援場地,救援時機器人可能要穿過隧道和橋面等,最后才能進行救援。因此,需要設計氣動可變距行走機構。為提高行駛效率,設計輪式救援機器人行走機構,并且通過控制左右輪速度不同實現差速轉向,該方案具有結構簡單和控制容易的特點[5,6]。
氣動可變距裝置具體結構如圖1所示。氣缸固定于左側板上,氣桿固定于右側板上,左側板與車體底板固定聯接,右側板與車體底板之間可以存在相對運動。右側板與車體底板之間的相對位置是靠三根同步平行氣桿來保證的。該撐開結構可大大提高變距撐開速度,節省救援時間,經過實車試驗,撐開時間可控制在1s之內。該撐開裝置結構簡單、穩定性好。
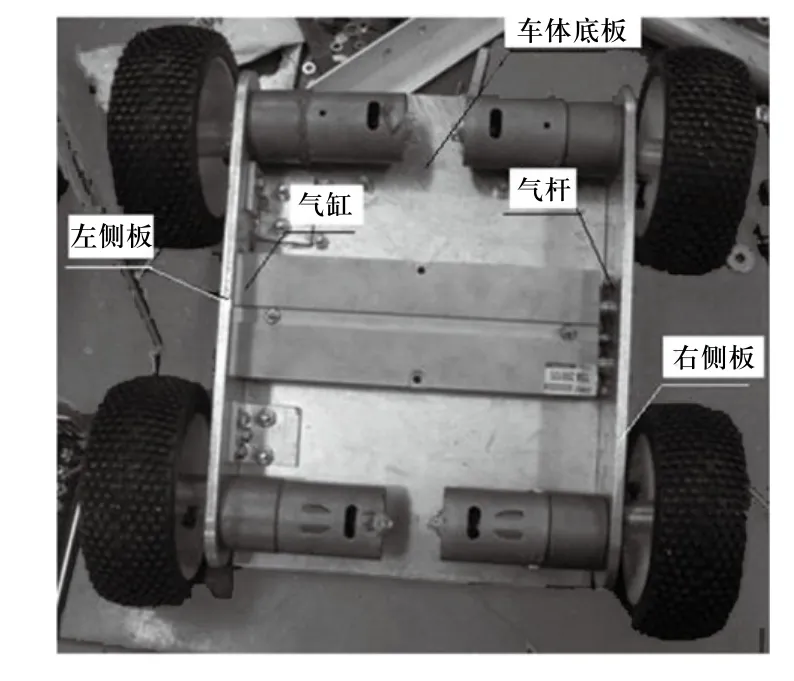
圖1 變距撐開裝置
行走輪選取橡膠輪,該橡膠輪外圓直徑較大,可以增加車子前進速度;輪子與地面之間為彈性接觸,不僅增大了輪子與地面之間的附著系數,而且降低了車身振動。四個輪子分別被電機驅動,電機固定安裝于左右側板上,電機輸出軸通過聯軸器與橡膠輪相連接。該結構形式的行走系統,通過控制左右輪速度不同實現差速轉向。
2 救援目標抓取裝置的設計
救援目標抓取方式可以有多種分類,包括單爪式抓取裝置、一臂多爪式抓取裝置、吸盤抓取方式、掃鏟式抓取方式等等。各種抓取方式均有一定優點和缺點。
該結構形式的抓取裝置包括機械臂和機械手兩部分。其中機械手屬末端執行器裝置。目前,常見的末端執行器有機械式夾持器、吸附式執行器、仿生手等。其中仿生手式末端執行器能模仿動物手部完成一定動作,動作靈活,但是該結構形式的末端執行器由于結構和控制都比較復雜,在該救援任務中不適宜采用。吸附式執行器和機械式夾持器是本設計任務中考慮采用的兩種末端執行器。但是吸附式執行器在吸附表面不規則目標時受到局限。因此,設計中考慮采用鏟掃式抓取裝置。其結構如圖2所示。伸縮臂采用氣動結構,斜形擋板裝于左右氣缸上,前擋板固定于氣桿上。底部裝有網狀收集器,可將救援物資收集在車體內,以節省救援時間。該收集裝置可順利實現復雜環境下不規則形狀救援物資短時間順利收集。
車體底板上固定安裝支撐軸座1,支撐軸通過軸承支撐于支撐座1上,支撐軸上固定安裝大齒輪和支撐座2上固定有兩個尼龍套筒,尼龍套筒用來固定氣缸。直流電機固定于車體上,通過齒輪帶動支撐座2及其上的裝置做旋轉運動,同時氣缸可自由伸縮,從而完成救援目標的抓取。其中斜形擋板底部經過磨削厚度較小,并且經過反復試驗,最終確定斜形擋板與地面之間適宜的夾角為38°。該傾斜角的斜形擋板可以減小阻力,確保救援目標順利收集。
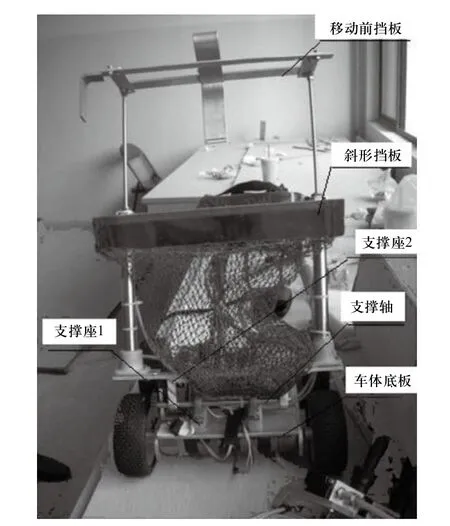
圖2 鏟掃式收集裝置
3 車體參數及氣動控制系統設計
本設計主要以節省時間為基本原則,變矩機構的存在,使機器人對地面具有較大的環境適應能力,并且機器人本身體積小、搬運物資效率高,適合各種狹小空間、環境復雜的受災現場救援。車體主要參數如下表1所示。
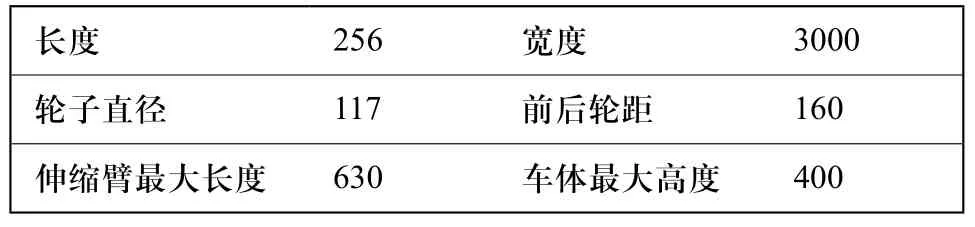
表1 救援機器人總體尺寸 單位(mm)
氣動原理圖如圖3所示。

圖3 氣動控制系統
左右氣缸控制收集裝置快速伸縮,換向閥1控制左右氣缸同時進退,換向閥2控制機器人左右輪變距撐開與回縮。
4 結束語
本文對可變距救援機器人各部分結構進行了設計。主要完成以下工作。
1)設計出變距結構方案,該變距結構能夠使左右輪同步等速撐開,確保救援機器人順利越過河道支撐橋到達救援區域;設計出四輪式差速行走機構,驅動輪選取橡膠輪,有利于提高機器人行駛穩定性;
2)設計新型氣動救援目標抓取裝置,并通過試驗確定收集裝置固定擋板與地面之間的傾斜角度,以實現救援目標的順利抓取和搬運;
3)進行了總體運動規劃及總體結構設計方案,并對主要驅動裝置進行選型、對主要零部件進行了設計校核。
本救援機器人經過進一步細化后有望用于災場救援,可較快實現救援物資的安全轉移。
[1]閆清東, 魏丕勇, 馬越.小型無人地面武器機動平臺發展現狀和趨勢[J].機器人, 2004, 26(4): 373-379.
[2]陳殿生, 楊喜, 李強.小型地面偵察機器人移動載體技術研究[J].機器人技術與應用, 2006, (6): 43-46, 21.
[3]蔡鶴皋.機器人將是21世紀技術發展的熱點[J].中國機械工程, 2000, 11(1-2): 58-60.
[4]Voth D.A new generation of military robot [J].IEEE Intelligent Systems, 2004, 19(4): 2-5.
[5]莫海軍, 朱文堅.履帶式移動機器人越障穩定性分析[J].機械科學與技術(西安), 2007, 26(1): 65-67, 71.
[6]陳淑艷, 陳文家.履帶式移動機器人研究綜述[J].機電工程, 2007, 24(12): 109-112.
猜你喜歡
哲學評論(2021年2期)2021-08-22 01:53:34
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
現代企業(2015年9期)2015-02-28 18:56:50
