基于WSNs的電動機故障智能診斷和保護系統設計
2012-10-16 10:09:18高相銘孫志富何民會
制造業自動化 2012年20期
高相銘,孫志富,何民會
(1.安陽師范學院 物理與電氣工程學院,安陽 455000;2.中原油田石油化工總廠,濮陽 457062)
0 引言
無線傳感器網絡(Wireless Sensor Networks,WSNs)是由一組傳感器節點通過無線方式并采用自組織的形式構成的一個傳感器網絡,網絡中大量的傳感器節點協同工作,對處在網絡覆蓋區內的被監測對象的相關信息實施監測、感知和采集,然后將被測信息經由無線網絡傳送到監控中心計算機。WSNs所具有的數據傳輸安全可靠、組網靈活和設備接入網絡快等特點使其在工業現場的應用中嶄露頭角[1]。
長期以來,處于復雜工業環境下的電動機故障時有發生。盡管工業生產中的電動機都配備現場綜合保護裝置,但是這些裝置只有在電動機相關運行參數達到或超過系統的整定參數值時才能夠動作,因而并不具有預防功能。基于此,我們研究開發了基于無線傳感器網絡與支持向量機模型的電動機故障智能診斷和保護系統,實現了電動機的早期故障診斷和現場綜合保護功能的一體化。
1 系統總體設計
通過分析電動機各類故障的特征,我們最終選擇了如下方案實現系統的功能:實時采集三相定子電流,根據對稱分量法將其分解為正序、負序和零序分量,將其和整定值進行比較即可判斷是否有定子繞組故障;同時對定子電流信號進行小波包分析,提取不同故障時各頻帶能量作為故障特征向量,利用人工蜂群算法優化的支持向量機模型對電動機的轉子故障進行實時診斷。
基于WSNs的電動機故障智能診斷和保護系統結構如圖1所示,它主要由三部分構成:無線傳感器網絡、GPRS網絡和上位計算機。
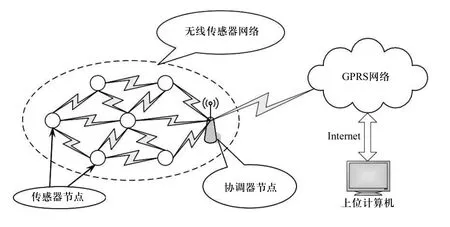
圖1 系統總體結構圖
系統中的無線傳感器網絡由一個網絡協調器節點和大量的傳感器節點組成。傳感器節點又稱感知節點,它一方面將采集到電機定子電流數據通過無線方式發送給協調器節點;另一方面對實時采集的定子電流信號利用三相對稱分量法進行分解,并根據各電流分量的值來判斷故障類型,從而使現場保護裝置采取相應的保護動作。在無線傳感器網絡中,網絡協調器節點又稱Sink節點,它負責將感知節點報送的定子電流數據通過GPRS網絡實時上傳給監控中心的上位計算機。上位機主要實現電機的早期故障診斷和預測,它通過對電流信號進行3層小波包分解從而提取電機的故障特征向量,并將此向量輸入人工蜂群算法優化后的支持向量機模型進行訓練,訓練完成的支持向量機模型即可用于轉子故障的在線實時診斷。
由于當前的計算機都配備了高速的微處理器和大容量內存,加上豐富的軟件資源,使其非常有利于進行復雜的數據計算和分析,因此一臺計算機可以對整個工廠內所有電機的工作狀態實施在線監測和早期故障的智能診斷。
2 無線傳感器網絡的硬件設計
2.1 傳感器節點硬件電路設計
傳感器節點是無線傳感器網絡的基本單元,其性能對整個網絡的數據質量和整體性能產生直接影響,不僅如此,傳感器節點在本系統中還充當著電動機現場綜合保護模塊的重要角色。它不但負責將采集到定子電流數據上報給協調器節點,而且要對定子電流和電壓數據進行實時運算分析,判斷定子繞組是否發生故障,實現電機的現場綜合保護。我們設計的傳感器節點由數據采集單元、微處理器、同步采樣脈沖產生電路、無線數據傳輸單元以及報警顯示模塊等組成。傳感器節點硬件結構如圖2所示。

圖2 傳感器節點硬件結構圖
2.1.1 數據采集單元設計
數據采集單元主要由電壓互感器和電流互感器及相應的信號調理電路組成,負責采集電動機的電壓和電流信息,并將互感器輸出的交流電壓或電流信號調理為A/D轉換器能夠輸入的0~5V的單極性電壓信號。調理的方法是:采用精密電阻 R1 和R2分壓的方法使信號衰減為幅值不超過2.5V的交流電壓信號,并由電壓基準電路產生一個正2.5V的直流信號,把衰減后的交流信號與之相加,就得到了在0~5V 內變化的反映了交流信號值的單極性信號。采樣信號經過分壓、疊加、反相、跟隨、和鉗位進入采樣保持器,由采樣保持器將其輸入16位A/D轉換器AD7705進行數字化處理。
2.1.2 無線數據傳輸單元設計
在無線數據傳輸單元時,我們采用了CC2420射頻模塊,CC2420是TI公司生產的第一款符合IEEE 802.15.4標準的2.4GHz射頻收發器。它包含了物理層(PHY)及媒體訪問控制器(MAC)層,具有功耗較低、傳輸速率為250kbps、喚醒時間15~30ms、CSMA/CA信道狀態偵測等特性。此外,CC2420芯片的工作模式是通過4線SPI總線(SI、SO、SCLK、CSn)來進行設置、而讀/寫緩存數據和狀態寄存器也是通過SPI總線來實現;發射/接收緩存器的設置是通過控制FIFO和FIFOP管腳接口的狀態來完成;CCA管腳狀態決定了是否清除信道估計;SFD管腳狀態決定了是控制時鐘輸入還是定時信息輸入。這些管腳接口通過與微處理器的相應管腳相連即可實現系統射頻功能的控制與管理。
2.1.3 微處理器選擇
傳感器節點中的微處理器是實現電動機現場綜合保護和現場數據通信的核心,因此我們選用了AVR系列的Atmega128L微處理器。它有128kB的系統可編程Flash ROM、4kB的E2PROM、以及4kB的片內SRAM,同時還可以通過I/O進行外部存儲器擴展;采用先進的RISC結構,大部分指令都可以在一個時鐘周期內完成;它的通信接口非常豐富,包括了1個SPI接口、1個兩線串行接口TWI和2個通用RS232接口。Atmega128L自身具有掉電檢測功能,通過軟件設定,能夠實現在電源電壓過低時,系統自動將關鍵數據保存到微處理器的E2PROM內,保證了數據的安全性。
2.2 Sink節點硬件設計
Sink節點接收感知節點通過Zigbee協議發送的電機電流數據,經過處理后通過GPRS網絡和TCP/IP上傳給監控中心的上位計算機。Sink節點實現了Zigbee和GPRS兩種協議的直接轉換,是整個無線傳感器網絡的路由器和網關。Sink節點主要包括CC2420射頻模塊、Atmega128L、DS3231實時時鐘芯片、Q2406A等模塊組成。
微處理器是整個網絡協調器的中心,處理器性能的好壞決定了整個節點的性能。因此我們也采用了ATmega128L做為網絡協調器的微處理器單元。網絡協調器的射頻收發模塊負責與傳感器節點進行通信,接收傳感器節點上傳的三相電流數據。同傳感器節點一樣,網絡協調器節點也采用了CC2420射頻模塊。GPRS模塊采用法國Wavecom公司Q2406A通信模塊,實現數據的遠程傳輸功能。
3 系統軟件設計
基于WSNs的電動機故障智能診斷和保護系統的軟件設計包括上位機軟件和下位機軟件的開發設計。下位機軟件主要實現無線傳感器節點的數據采集及發送、電動機現場綜合保護、網絡協調器節點與GPRS模塊之間的數據通訊等功能。上位機軟件主要對電動機內部是否存在轉子故障進行實時診斷。
3.1 下位機軟件設計
由于傳感器節點和網絡協調器節點均是以Atmega128L和CC2420為核心的系統,因此我們采用了ICC AVR結合Z-Stack 協議棧進行開發。通過適當配置或定義Z-Stack實現無線傳感器網絡的ZigBee網絡協議層,而網絡的物理層(PHY)和媒體訪問控制層(MAC)則通過CC2420來實現。這樣,我們只需通過控制CC2420即可以實現支持ZigBee協議的無線通信,從而而構建自己的ZigBee無線傳感器網絡系統。傳感器節點的軟件程序流程如圖3所示。

圖3 傳感器節點程序流程圖
3.2 上位機軟件設計
上位機軟件采用了交互式的C語言開發平臺LabWindows/CVI進行開發,主要實現了如下功能:對電機的運行狀態進行實時監測;定期對電動機內部是否存在轉子斷條故障、定子繞組匝間短路故障、氣隙偏心故障等進行實時診斷,診斷周期可以自主設定;如果診斷發現故障存在,立即通過聲光報警信號通知運行人員,如果運行人員不在現場,系統在報警持續1分鐘后強制切斷故障電機電源;系統中的支持向量機故障診斷模型具有在線自學習功能,也可通過軟件界面中的“支持向量機模型訓練”菜單手動訓練模型;支持歷史數據查詢和通信設置。
軟件中的電機故障特征提取功能和支持向量機故障診斷模型主要通過LabWindows/CVI調用MATLAB軟件來實現。
4 結束語
基于WSNs的電動機故障智能診斷和保護系統實現了一種全新的電機保護模式,它是集現場綜合保護和早期故障智能診斷為一體的無線網絡化遠程分布式系統。從系統的實際運行結果可以看出:基于無線傳感器網絡的數據傳輸方案保證了故障診斷所用數據的實時性、可靠性和完整性;采用基于小波包分析的方法提取的電動機故障特征明顯;采用支持向量機結合人工蜂群算法建立的故障診斷模型具有良好的性能。該系統具有無線化、網絡化和智能化的特點,能夠實時監測電機運行狀態參數、準確診斷電機的故障類型并實施有效的綜合保護,大大降低了電動機的故障停機率和由此帶來的經濟損失。
[1]孫利民, 梁江濤, 魏然.基于GPRS與ZigBee的遠程分散多點監控系統[J].鄭州大學學報(工學版), 2012, 33(1):24~27.
[2]肖蕙蕙, 熊雋迪, 李川等.基于定子電流監測方法的電機故障診斷[J].電機與控制應用, 2008, 35(1): 54~57.
[3]張征平, 楊楚明, 任震.電動機轉子故障在線監測誤判率高的原因及其改進方法[J].電力自動化設備, 2003,23(6): 21~24.
[4]高相銘, 楊世鳳, 胡瑜.ZigBee技術在城市管網監測系統中的應用[J].電氣傳動, 2012, 42(1): 49~52.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
汽車維修與保養(2019年7期)2020-01-06 03:30:42
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年6期)2015-04-17 03:31:50
