垂直相關儀測量高速目標深度的仿真分析
2012-10-20 06:58:06岳劍平李宏偉
艦船科學技術 2012年1期
岳劍平,尚 超,李宏偉
(91388部隊,廣東 湛江 524022)
0 引言
高速射流噴射在推進器管壁和水介質上,產生結構振動噪聲和氣泡脈動噪聲。文獻[1]討論了沿深度方向機動的噴射航行體輻射噪聲機理,其中高頻分量以振動噪聲為主,對單水聽器信號自相關提取“海面反射—直達聲”時延差產生相關峰展寬效應。這種時延參數估計的多普勒效應,增大了高速目標的深度測量誤差,于是考慮采用垂直相關儀的測量方案,即利用垂直布放的小尺度雙陣元對目標俯仰角進行估計,并通過解算模型對目標深度進行測量。
1 垂直相關儀目標深度測量原理
參見圖1,假設目標水平距離R為先驗值,根據直達聲俯仰角θ,可求解目標深度:

近程直達聲以平面波方式傳播,不難推得:

式中:c為聲速;τ12為相關儀雙陣元測得的傳播時延差;d=d2-d1為陣距。
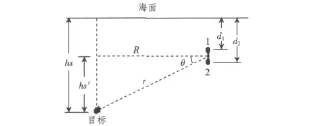
圖1 垂直相關儀目標深度測量幾何示意圖Fig.1 The geometric sketch of the depth measurement
2 信號相關特性及多普勒容限
根據文獻[2],白噪聲經過1個理想帶通濾波器,產生帶通型限帶白噪聲,具有均勻的譜結構,其功率譜密度表示為:

式中:W為角頻率帶寬;ω0為通帶中心角頻率;S0為常數,代表單位角頻率帶寬的噪聲功率。應用維納-辛欽定理,可以導出對應的信號相關函數:

其中,cosω0τ可理解為載頻信號,相關峰值表示噪聲總功率。
包絡受到辛格函數sinx/x的調制,主包絡寬度為4π/W=2/B,其中B為信號帶寬,以Hz為單位。主極大相關峰的根部取值為0,寬度即為載頻的1/4周期,其時間分辨力為:

式中:f0為通帶中心頻率,Hz。當W=ω0或B=f0時,主包絡內只含有惟一的主極大相關峰。這種情況下,即使背景噪聲較大,也不太容易發生將副包絡次極大誤判為主極大的錯誤。取B=f0=20 kHz,于是δτ=12.5 μs。若采樣頻率設置為500 kHz,或結合內插算法,信號相關時延差估計精度應當優于10 μs。
目標聲源與測量基陣作相對運動時,接收點的信號波形與輻射波形相比較,在時間上將被壓縮或拉伸,這一現象稱為多普勒現象。多普勒現象將導致互相關系數降低,稱作互相關失配。
根據文獻[3],基陣聯線的中垂線上,多普勒的影響最為顯著。如圖2所示,對于小尺度基陣,認為R>>d,于是陣元接收信號的波形時間關系有:

式中:T0為輻射波形的時間長度;v為目標沿深度方向運動速度;c為聲傳播速度;R為目標水平距離。式(6)表明,陣元1的信號長度T1被壓縮,陣元2的信號長度T2被拉伸。
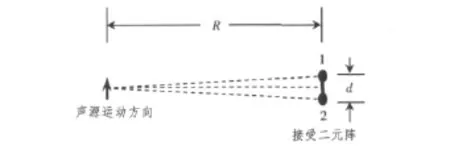
圖2 二元基陣測量原理示意Fig.2 The sketch of the principle with two sensors
信號長度的差值表示為(T2-T1),一旦該值大于噪聲信號的時間相關半徑,即認為2個接收信號不再相關。依據主極大相關峰寬度,給出互相關的多普勒容限不等式:

化簡為:

多普勒容限表現為互相關積分時間T0受到限制。值得注意的是,互相關積分時間與目標距離呈正比例關系,即近距離目標的積分時間更短。
為便于仿真觀察,不妨取信號頻段10~30 kHz,另令c=1 500 m/s,R=350 m,v=300 kn和 d=3 m,于是 B=f0=20 kHz,計算得 T0<14.6 ms。時域信號仿真如圖3所示,2個陣元的差值信號在15 ms以內,反映了幅度線性遞增的規律,表明陣元之間信號相關度隨時間減弱的趨勢,與理論值吻合一致。
3 淺海多途信道沖激響應結構
目標的當前位置(深度)記成hs,僅考慮海面海底一次界面反射的情形。由于目標高速運動,當陣元接收到當前時刻直達聲的同時,還將接收到此前某一時刻“先發后至”的海面反射聲,和另一時刻“先發后至”的海底反射聲,三者時間上重疊,但互相獨立而分別形成信號和干擾。為便于仿真觀察,不妨假定海面反射干擾來自目標hs+10 m深度,而海底反射干擾來自目標hs+20 m深度,均含相應的多普勒信息。
采用極短脈沖可測試淺海信道的沖激響應函數,如圖4所示。仿真不僅反映了上述3個信號或干擾的疊加現象,同時還給出了直達聲“副本”所形成的一次界面反射的時延結構。其中海底反射“副本”的時延較大,并且隨目標深度減小而進一步增大。

圖4 多途信道的時延結構Fig.4 The time delays of the multi-path channel
4 多途信道信號互相關多普勒仿真
對于高噪目標,近程接收信噪比很高,仿真可不考慮環境背景噪聲。互相關積分時間取20 ms,并限定目標俯仰角不大于45°。陣距設為1.5 m,相關延遲域觀察窗選取±1 ms,因此海底反射的“副本”信號被排除在外,大多只含有4個信號,包括了直達聲、海面反射“副本”和2個多途干擾,其中僅前2個信號有可能相關。當不考慮多普勒效應時,這2個相關信號將產生(負向的)交叉相關峰。
如圖5所示,4個信號按鏡像原理,在深度方向上由深及淺,分別形成了1個真實的直達聲源和3個反射虛源,依序為海底反射干擾、直達聲信號、海面反射信號和海面反射干擾。一般地,負軸最小延遲的相關峰即代表直達聲信號。圖中,目標接近海面且多普勒取0 kn,因此合成信號觀察到了(負向的)交叉峰現象。當設置目標速度150 kn時,該交叉峰消失。
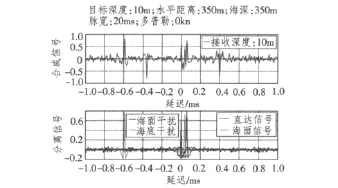
圖5 無運動多普勒的相關交叉項現象Fig.5 The cross-item phenomenon of the correlation without Doppler
利用仿真還可觀察信號互相關的多普勒失配效應。在圖3仿真條件下僅改變積分時間長度,發現信號脈寬T0=15 ms的質量較好,當T0≥25 ms后,互相關失配開始趨于明顯。圖6仿真表明,延遲域觀察窗不僅排除了海底反射“副本”信號,而且還排除了海底反射干擾相關峰。由于目標速度高,因此無法觀察到交叉峰現象,且積分時間大于式(8)理論值一倍時,相關系數損失約50%。
5 目標深度測量誤差分析
根據式(2),僅考慮測時誤差,推導俯仰角測量誤差為:

式中:στ12為時延差估計精度。取c=1 500 m/s,d=1.5 m,στ12=10 μs,θ最大取值 45°,計算得 σθ≤0.0141 rad,即 0.81°。
根據式(1),目標深度測量誤差的傳遞公式為:

觀察式(10)根號下第一項,通常hs'≤R,由此引起的誤差最多與水平測距誤差相當;觀察根號下第2項,與目標斜距r呈正比例關系,考慮最大的θ=45°,其值不大于 2Rσθ。
相關儀測量陣元鉛垂布放,當安裝傾斜角出現0.4°偏差,即2個陣元聲學中心的水平偏差為1 cm時,按R=350 m且θ=45°進行換算,引起目標深度的測量偏差約3.5 m。

圖6 互相關的多普勒容限仿真Fig.6 The simulative result of the Doppler tolerance of the cross-correlation
根據式(2),陣距誤差引起的角度偏差為:

陣距校準后的偏差Δ d/d取1.5‰,如d=1.5 m的情況,聲學中心的陣距偏差控制在±2.25 mm以內。
忽略測量的系統偏差,僅對隨機誤差進行理論和仿真分析。假設利用3個矢量傳感器基陣,布設呈基線600 m的正三角陣形,對目標的水平面定位精度σx和σy約為5 m,換算水平測距誤差σR約為7 m。每個測量基陣均安裝垂直相關儀,目標位于陣形中心點,距離各基陣約350 m,而目標布放深度與此相當,即俯仰角最大約45°。根據式(9)和式(10)進行誤差綜合,目標深度測量誤差不大于12.1 m。
設置相關儀陣距1.5 m,布設深度30 m。圖7是其中1個相關儀測量目標深度的仿真結果,上升軌跡稍有傾斜,是為了便于觀察深度測量的散布情況。圖8是上升軌跡無傾斜時的誤差統計結果,表明測量精度與理論分析一致。
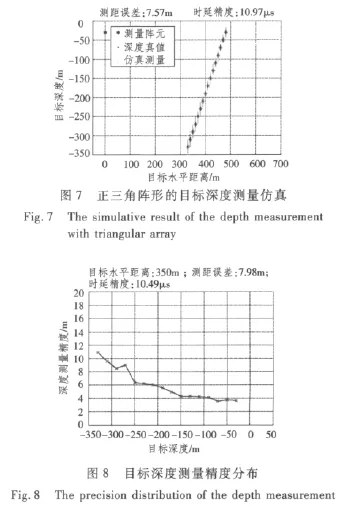
6 結語
垂直相關儀用于目標深度估計,主要受淺海信道多路徑干擾。研究表明,互相關延遲域的相關峰結構實際上具有空間映射關系,直觀地反映了直達聲目標和界面鏡像的空間分布規律,并且多普勒效應有助于降低多途交叉干擾。仿真結果表明,在給定的諸多條件下,垂直相關儀的目標深度測量誤差大約控制在10 m以內。
[1]岳劍平,孫良義,賈建龍.噴射航行體輻射噪聲機理分析[J].艦船科學技術,2008,30(6):155 -156.YUE Jian-ping,SUN Liang-yi,JIA Jian-long.Mechanism analysis of radiated noise for spraying vehicle[J].Ship Science and Technology,2008,30(6):155 -156.
[2]朱華,黃輝寧,李永慶,梅文博.隨機信號分析[M].北京:北京理工大學出版社,1990.227 -229.ZHU Hua,WANG Hui-ning,LI Yong-qing,MEI Wen-bo.Random signal analysis[M].Beijing:Publishing of Beijing Institute of Technology,1990.227 -229.
[3]惠俊英.水下聲信道[M].北京:國防工業出版社,1992,96-98.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
藝術品鑒證.中國藝術金融(2018年12期)2018-08-26 06:03:48
電子制作(2018年11期)2018-08-04 03:25:42
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
