
基于iSIGHT的UUV優化設計平臺
2012-10-20 06:58:08胡志強陳宗芳
艦船科學技術 2012年1期
胡志強,陳宗芳,鄭 榮
(1.機器人學國家重點實驗室中國科學院沈陽自動化研究所,遼寧 沈陽 110016;2.中國科學院 研究生院,北京 100049)
0 引言
在水下航行體的設計過程中,其外形設計是整個設計流程中的一項極其繁重又重要的工作。因為外形對航行體的快速性、操縱性和耐波性等均有重要影響。傳統的設計,主要是通過借鑒已知的成功的航行體外形并結合設計者經驗完成初步方案,并反復修改以形成最終方案。這一過程,即使采用CAD/CAM技術,仍然需要大量的手工操作,耗時耗力。同時,這一過程對設計人員有極高的要求,最終方案的優劣很大程度上取決于設計者的經驗。而隨著計算機技術及數值計算技術的發展,采用數值方法對設計方案進行優化設計已成為一種趨勢,從而使航行體的參數化設計成為一種必須。所謂的參數化設計,即指對模型中的約束信息進行處理,使之成為可以調整的參數,將參數賦予不同的值,即可得到各種航行體模型。
iSIGHT是目前國際上優秀的綜合性計算機輔助工程軟件之一。iSIGHT軟件將大量需要人工完成的工作由軟件實現自動化處理,從而替代工程設計者進行重復性、易出錯的數字和設計處理工作,因此iSIGHT被稱為“軟件機器人”。iSIGHT強大的集成功能,可以在設計過程中充分利用各學科先進的分析工具,并將其集成起來以實現設計流程的自動化。本文首先提出了一種型線及三維模型的參數化方法,并且自編程序驅動SolidWorks實現參數化建模,利用網格剖分軟件 Gridgen實現網格的劃分,然后利用iSIGHT平臺集成Gridgen及CFX,進行了試驗設計,以找到對模型阻力外形影響較大的參數,針對主要影響參數,選定了合理的參數范圍,以最小阻力為目標實現了UUV的優化設計。
1 參數化方法
1.1 參數化思想
通常水下航行體為流線型,其縱剖線的形狀類似于飛機的翼型曲線,故可借鑒飛機翼型的參數化表達方法實現對縱剖線的參數化。參考文獻[1-2]提出了1種稱為CST方法的曲線的參數化表達方法(見圖1)。

圖1 翼型的參數化表達Fig.1 The parametric expression of foil
圖1所示曲線,其表達式為:
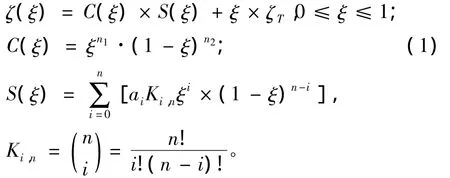
式中:ξT為末端厚度;C(ξ)稱作種類函數(class function);S(ξ)稱作形狀函數(shape function)。理論上C(ξ)與S(ξ)可以是任意二階連續函數。參考文獻[1-2]對S(ξ)取的是n階Bernstein多項式,并對每一項乘以不同的權重ai,以達到曲線可調節和設計優化的目的。當n1,n2,ai取不同值時,即可生成不同形狀曲線,從而達到了曲線參數化的目的。這種方法所需參數少,表達能力強,曲線調整靈活,且易于編程實現。
CST方法的一個重要問題是其表達精度問題,即形狀函數采用幾階多項式才能保證該方法具有足夠的精度,以滿足后續的建模及計算流體動力學的需要。下面以某已知型線為例,來研究CST方法的表達精度問題。
如圖2所示,上圖為已知型線,下圖分別為其上下部分的形狀函數,分別采用2,4,6,9階 Bernstein多項式時其擬合的殘差,見表1。
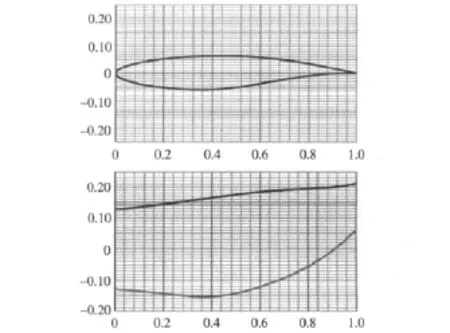
圖2 型線及其形狀函數Fig.2 Profile line and its shape function

表1 不同階Bernstein多項式時的殘差Tab.1 Residual error with different order of Bernstein polynomial
從表1可知,即使采用較低階(4-6)的Bernstein多項式,仍然具有很高的表達精度,這也正是CST方法的優點。本文的設計中采用4階Bernstein多項式。
1.2 三維模型的生成
對于回轉體,通常可以看作是由縱剖線繞中心軸旋轉而成。而對于非回轉體,通常可以看作是二維曲線在空間位置的不同分布,圖3所示。
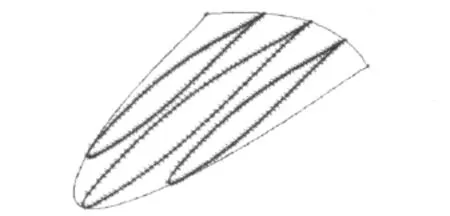
圖3 曲線在空間的分布Fig.3 The distribution of curves in space
非回轉類航行體,通常左右對稱,所以只需給出一側的曲線分布位置參數即可。確定了曲線在空間的位置分布之后,對其進行放樣,即可生成三維的航行體。如圖3所示模型的空間位置分布參數如表2所示。

表2 空間分布參數Tab.2 Parameters of distribution in space
當參數給定后,通過自編程序調用SolidWorks,即可實現UUV的參數化建模。
2 參數取值范圍
當完成參數化建模之后,需要完成參數取值范圍的確定。通常型線參數范圍的確定,可從實際布置的要求出發,利用包絡線的概念,作出極限情況下的包絡線,并確定此時包絡線的參數。空間位置分布函數的確定,則需要結合UUV的物理尺度,外形要求,綜合確定。
3 優化設計流程
由于目前的設計過程往往橫跨多個學科,涉及大量專業軟件,如本文就涉及了 SolidWorks,Gridgen,CFX等專業軟件。如果單獨在這些軟件中進行操作,不僅耗時耗力,而且對操作人員要求也較高。針對這些問題,目前在多學科多目標優化設計領域,集成框架軟件的開發已成為一項重要的研究內容。集成框架軟件的思想是通過1個設計平臺,來集成各個學科的專業知識,實現各學科間的數據共享及數據傳遞,從而將許多需要人工操作的地方變為全數字化和全自動化。
iSIGHT作為目前最流行的商用優化軟件,具有強大的過程集成能力。能將各學科代碼集成以實現設計流程的自動化,并能提供實時監控以及結果分析和處理功能。iSIGHT提供了諸如試驗設計,優化設計,近似方法和質量工程等。iSIGHT內置大量優化算法,軟件通常會根據用戶問題的性質自動推薦算法,同時也可自己制定優化策略,也可將自己的算法加入iSIGHT,使其具有極強的擴展性。
本文采用自編程序驅動SolidWorks建模,然后通過Gridgen進行網格劃分,通過CFX完成阻力計算,利用CFX-Post提供的后處理能力計算出阻力,再利用iSIGHT提供的文件解析能力,將阻力值作為優化的目標進行優化,以尋求最優設計。整個流程如圖4所示。
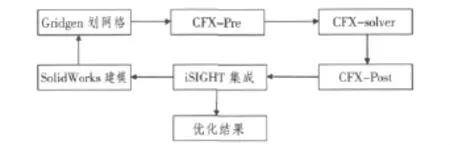
圖4 設計流程Fig.4 The process of design
由于本過程涉及多種軟件,而通常每種軟件都有其獨特的數據格式,所以在集成過程中面臨的一個重要問題是各軟件的數據交互。數據交互的目的是實現不同學科軟件之間的數據交換與共享。iSIGHT與SolidWorks之間的交互通過自編的程序實現,以達到利用優化算法尋找最優參數,并同步更新模型的功能。SolidWorks與CFD軟件之間的數據交互主要是與網格劃分軟件Gridgen之間的數據交互,以實現幾何參數傳遞,替代CFD中幾何模型的重建工作,保證數據的一致性。由于Gridgen與SolidWorks均支持IGES數據標準,故在SolidWorks中完成三維建模后,將其存儲為IGES格式,從而實現了 SolidWorks與Griegen之間的數據傳遞。
4 試驗設計
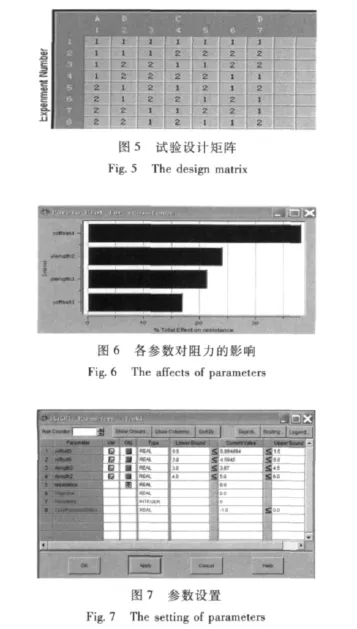
由于本設計涉及參數較多,為了方便后續的優化設計,首先利用iSIGHT提供的試驗設計功能,進行試驗設計(DOE),以找到對阻力性能起主要作用的參數,并針對這些參數進行優化設計。本文主要研究了剖面2,剖面3的空間 y向偏置位置yoffset3,yoffset4以及剖面1,剖面2的y向長度ylength2,ylength3等4個參數對UUV阻力性能的影響。各參數初始值取表1中的參數。采用正交矩陣方法,各因子取2個水平,分別為初始值的90%和110%。其試驗矩陣如圖5所示,其運行結果如圖6所示。
由試驗設計的運行結果可以看出,在上述的4個參數中,yoffset4是影響阻力的主要因素。
5 優化實例
我們仍然以試驗設計中的4個參數作為優化設計的參數,其變量設置如圖7所示。
根據本問題的特點,采用序列二次規劃法(NLPQL)進行優化設計。這種算法基本思想是將目標函數以二階拉氏方程展開,并把約束條件線性化,使得轉化為1個二次規劃問題。二階方程通過quasi-Newton公式得到了改進,而且加入了直線搜索提高了算法的穩定性。優化結果如表3所示。

表3 優化結果Tab.3 The optimization result
從優化結果中可以看出,總阻力由197.888 3降低至179.585 4,阻力降低了9.25%,此優化設計的結果比較明顯,達到了降低阻力的目的。
6 結語
本文通過自編軟件,調用 SolidWorks,實現了UUV的參數化建模。利用iSIGHT強大的集成能力及優化設計能力,集成了SolidWorks,Gridgen,CFX等軟件,建立了UUV的參數化建模及優化設計平臺,使整個設計流程自動化,提高了設計效率。本文利用試驗設計的方法,主要研究了空間分布參數對UUV阻力性能的影響,對其進行了優化設計。下一步的研究重點是與型線的參數的優化設計結合起來,以尋求最優設計。
[1]KULFAN B M,BUSSOLETTI J E.Fundamental parametric geometry representations for aircraft component shapes[A].11th AIAA/ISSMO Multidisciplinary Analysis and Optimization Conference,6-8 September2006 [C].Portsmouth,Virginia.
[2]KULFAN B M. A universal parametric geometry representation method-“CST”[A].45th AIAA Aerospace Sciences Meeting and Exhibit,8 - 11 January 2007[C].Reno,Nevada.
[3]程成,須文波,冷文浩.基于iSIGHT平臺DOE方法的螺旋槳敞水性能優化設計[J].計算機工程與設計,2007,28(6):1155-1459.CHENG Cheng,XU Wen-bo,LENG Wen-hao.Design and optimization of open water performance of propeller based oniSIGHT platform DOE methods[J].Computer Engineering and Design,2007,28(6):1155 -1459.
[4]許暉,鄭濤,石秀華.基于SolidWorks的參數化魚雷設計[J].艦船科學技,2004,26(1):32 -34.XU Hui,ZHENG Tao,SHI Xiu-huang.Parametric design of torpedo based on SolidWorks[J].Ship Science and Technology,2004,26(1):32 -34.
[5]秦麗萍.水下航行器外形優化設計方法研究[D].西安:西北工業大學,2004.QIN Li-ping.Research on optimal design of underwater vehicel[D].Xi'an:Northwestern Polytechnical University,2004.
[6]王寶莎,宋保維.多學科設計優化方法及其在水下航行器設計中的應用[J].機械設計與制造,2006,(3):26 -28.WANG Bao-sha,SONG Bao-wei.Multidiscipline design optimization and the opplication in the collectivity design of the aircraft underwator[J].Machine Design and Manufacture,2006,(3):26 -28.
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
意林原創版(2016年10期)2016-11-25 10:28:30
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
