雙加熱濕度傳感器的CFD分析與加熱策略設計*
2012-10-21 03:45:04劉清惓楊榮康張加宏
傳感技術學報 2012年8期
劉清惓,楊 杰* ,楊榮康,張加宏,李 敏,戴 偉
(1.江蘇省氣象探測與信息處理重點實驗室,南京 210044;2.南京信息工程大學,電子與信息工程學院,南京 210044;3.中國氣象局氣象探測中心,北京 100081;4.南京信息工程大學,計算機與軟件學院,南京 210044)
濕度傳感器通常分為電容式和電阻式兩類。近年來,由于電容式濕度傳感器顯示了溫度系數相對較小、響應速度快、濕度的滯后量小等優點[1],電容式濕度傳感器已成為氣象領域濕度測量的主流技術。
圖1(a)為傳統濕敏電容器件結構示意圖,在襯底正面制備濕敏電容的兩個電極和相應的引線及焊盤。圖1(b)為雙加熱濕度傳感器結構示意圖,雙加熱濕度傳感器由兩個相同的濕度傳感器構成,傳感器與PCB板之間通過薄型PCB板相連。薄型PCB板不僅具有熱阻大、熱容小的優點,而且當其距離較小的情況下還能夠保證一定的剛度。
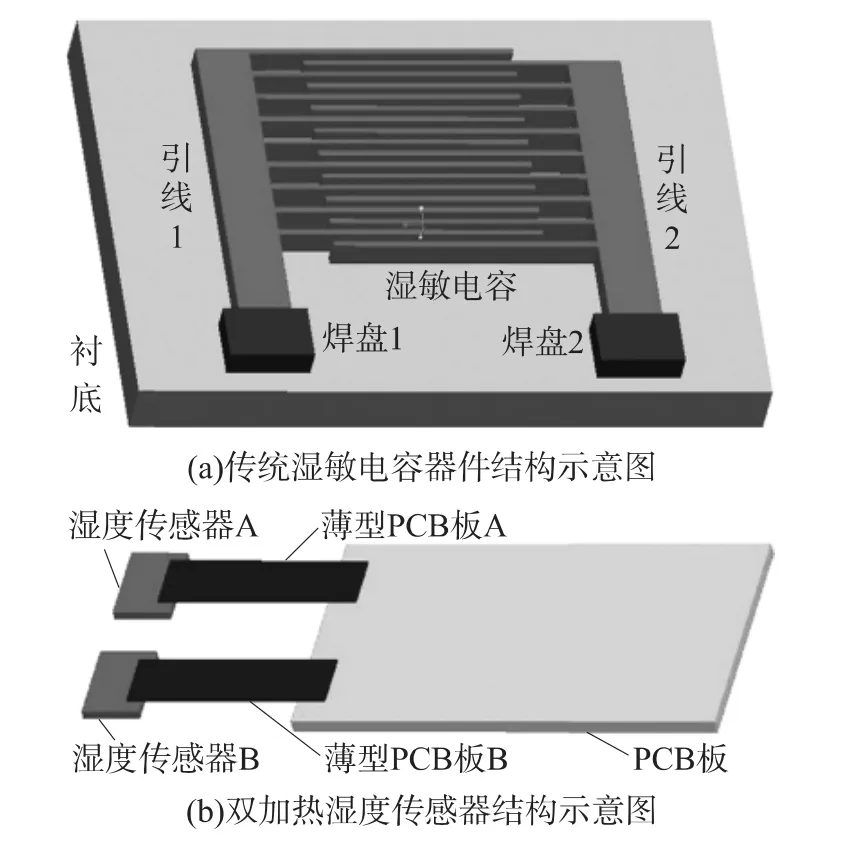
圖1 濕度傳感器結構示意圖
常規高空氣象觀測中,不僅需要濕度傳感器具有較高的精度,而且響應速度需達到秒級,因此濕度傳感器表面應與空氣充分接觸。測量時,為便于氣流吹過濕度傳感器芯片表面,濕度傳感器需暴露在探空儀的外部。然而,隨著探空高度增加,環境溫度降低可能使得濕度傳感器表面結霜或結冰,霜或冰覆蓋在其表面會導致測量結果偏離準確值。即使表面沒有附著霜、冰、雨滴等,當環境溫度達到-30℃甚至更低時,水分子在濕敏薄膜中擴散會變得相當困難,從而降低響應速度和測量精度[2]。芬蘭Vaisala(維薩拉)公司為了解決上述問題,提出了一種基于雙加熱濕度傳感器的探空測量方法,初步解決了雨滴、霜、冰晶等表面覆蓋物烘干問題。如圖1(b)所示,這類傳感器由兩個相同的電容式濕度傳感器構成,在芯片上還集成了加熱電阻及與之相連的焊盤。其工作原理為兩個濕度傳感器交替循環工作,濕度傳感器A進行烘干時,濕度傳感器B在進行測量,當A完成烘干進行測量時,B再進入烘干。雙加熱濕度傳感器是氣象傳感領域一種前沿技術,國內外鮮有公開發表的論文和專利對其加熱特性和加熱策略進行研究,金建東等初步研究了具有加熱功能的雙模塊濕度傳感器的應用,但是未進一步研究其雙加熱機理[3]。本文提出利用計算流體動力學(CFD)仿真方法對其加熱特性和加熱策略進行研究,通過對雙加熱濕度傳感器進行流固耦合傳熱仿真,即可求解出它的特性參數,從而可以提出合理的加熱策略。
為便于數學描述,將雙加熱濕度傳感器的工作周期分為加熱段、穩定段、冷卻段和測量段,分別用圖2中的t1~t4表示。在加熱段加熱傳感器使其溫度從T1(環境溫度)升高到目標溫度T2(高出環境溫度50℃)。在穩定段通過芯片中集成的加熱電阻將傳感器溫度維持在T2。在冷卻段通過自然對流[4]對傳感器進行冷卻。最后進入測量段對濕度進行測量。t3段可近似為指數函數的衰減過程。為了用圖2簡單的表現出工作周期的四個階段,可以以Y軸方向的變化量為標準確定一個降溫門限,只要溫度值低于門限就近似認為溫度不再變化,因此把冷卻過程實際拆分成冷卻段和測量段。
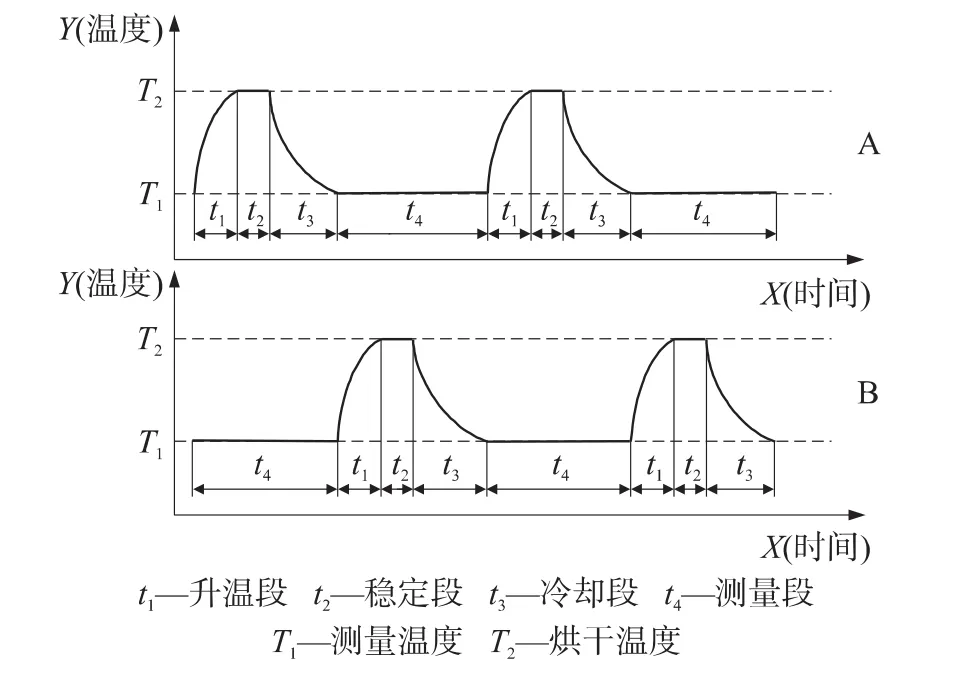
圖2 雙加熱濕度傳感器工作時間段示意圖
為提高烘干效果,降低芯片表面發生霜附著的概率,則測量周期應盡可能小。由于t2通常不能低于一定的經驗值,而t4等于t1~t3之和,所以實現優化設計的關鍵在于降低t1與t3之和。可以通過加大功率來實現縮短t1,但是加大功率會帶來干擾,導致傳感器無法得出準確結果,同時也不符合低功耗要求。縮短t1受加熱功率限制,降低t3的效果尤為顯著。影響加熱與冷卻的主要因素有空氣密度、加熱功率、探空儀懸掛姿態角、探空儀水平方向運動軌跡(通常近似為橢球狀)等,故要想獲得科學合理的解決方案必須針對上述因素進行系統的研究。
針對雙加熱濕度傳感器的具體問題,依據理論建立解析傳熱模型幾乎不可能,有諸多因素導致解析模型難以建立。傳感器表面可近似為多個六面體組合結構,不是標準球面,雷諾數大小只能由經驗估測,難以用解析方法求解方程得到精確解。如果考慮流固耦合傳熱,則使得數學模型變得相當復雜。因此,有必要用數值模擬的方法來解決。
由于CFD方法能夠根據實際問題建立實體模型,求解費用相對低廉。FLUENT是當前主流的CFD商用程序,不僅已在傳感器領域獲得較為廣泛的應用[5-9],而且也在氣象科學中找到用武之地[10-11]。2008年北京奧運會和2011年深圳大學生運會,我國學者利用FLUENT軟件對比賽場館的小尺度氣象進行研究,但國內外鮮有將FLUENT用于毫米數量級尺度的氣象觀測儀器仿真。本文通過FLUENT仿真分析,研究復雜對流熱邊界條件下雙加熱濕度傳感器的溫度場分布,求解出升溫時間和冷卻時間。通過建立不同濕度傳感器間距離模型,模擬出不同間距下濕度傳感器之間的溫度影響關系。
1 數值模型建立與分析
本文濕度傳感器芯片為6 mm×4 mm×0.625 mm的長方體。為了使得兩個濕度傳感器所測值能夠較精確且相互匹配,兩個傳感器需處在同樣的氣流環境中且互不影響。兩個傳感器有多種放置方式,既可以迎著氣流方向前后放置,又可以垂直于氣流方向并列放置。前后放置時,考慮到上風向濕度傳感器的加熱熱量由于氣流作用會影響下風向傳感器測量,因此本文采用兩個傳感器并列的設計方式,并考慮兩者之間間距這個影響參數,設計了4個尺寸間距,分別為0.5 mm、1 mm、2 mm、3 mm。
1.1 三維實體建模與網格劃分
圖3所示為三維建模軟件Pro/E建立的雙加熱濕度傳感器模型。較大的空氣域尺寸有利于提高計算精度,但會導致計算變得困難且難以求解;反之,可以使得算法容易實現,但計算誤差較大。因此需對空氣域尺寸進行優化。本文通過比較不同空氣域尺寸下模型的仿真情況,從精度和求解的難易程度上考慮,得出忽略PCB板情況下合理的空氣域尺寸60 mm×40 mm×100 mm,考慮PCB板情況下合理的空氣域尺寸150 mm×200 mm×200 mm。
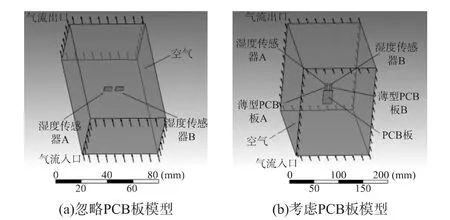
圖3 雙加熱濕度傳感器的三維實體圖
從圖3(a)可以看出中間的兩個長方體是雙加熱濕度傳感器,外圍包裹傳感器的長方體是空氣。圖3(b)中雙加熱濕度傳感器與PCB板之間通過薄型PCB板相連。由于攜帶探空儀上升的探空氣球體積大、質量小,假設忽略水平風突變的情況,則探空儀水平移動速度與水平風移動速度相同。若以探空儀為參照物,水平風近似為0 m/s,因此可忽略水平風對傳熱的影響。長方體空氣的下側面為氣流入口,探空儀上升速度根據載荷、高度不同而不同,通常在6 m/s左右,所以氣流入口的速度設為6 m/s。上側面為氣流出口,出口面相對于入口面的壓力為0 Pa。
為了獲得理想的網格劃分質量,本文采用目前主流的網格劃分軟件ICEM CFD中模塊(Block)的方法進行網格劃分[12],得到的六面體網格不僅可實現高的計算效率,亦可保證解算方程能正常收斂。圖4為雙加熱濕度傳感器與空氣的網格劃分情況,中部的黑色區域為雙加熱濕度傳感器,X、Y、Z三個方向的尺度充斥整個模型的長方體為空氣流動區域。從圖中可以看出對濕度傳感器以及其周圍空氣進行了較密的網格劃分,而對溫度變化較慢的區域進行了較疏的網格劃分。
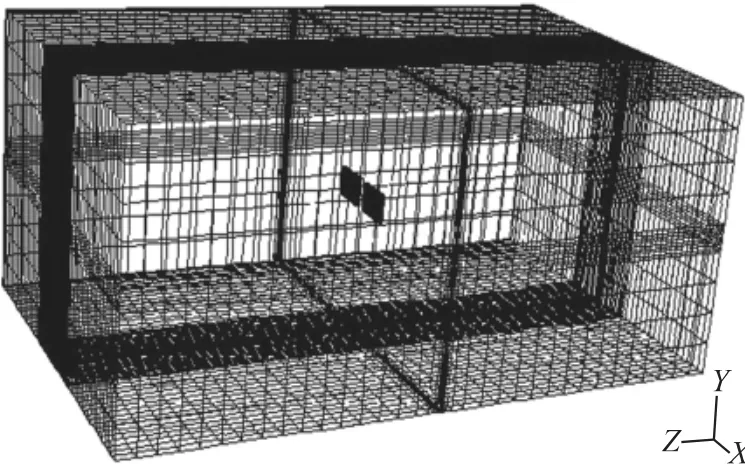
圖4 雙加熱濕度傳感器的網格劃分
1.2 邊界條件與計算方法
本文研究的雙加熱濕度傳感器需從地面升至32 km的高空,大氣壓隨著海拔高度的變化約有三個數量級,傳感器的對流換熱與其有密切關系。根據1976年出版的美國標準大氣[13]可知氣壓——海拔高度的數據關系如圖5所示。
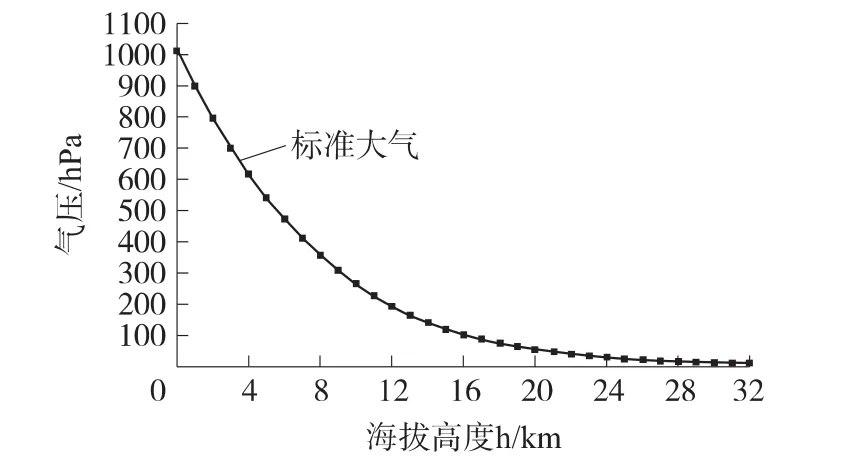
圖5 大氣壓力與海拔高度的關系圖
因流體流速較低,可假設為不可壓縮氣體[14],所以求解時基于壓力求解器(Pressure Based Solver),并采用非定常流動計算,時間步長為ms數量級。模型中因涉及傳熱計算,故使用能量方程;湍流粘性采用Laminar模型[15];壓力和速度解耦采用SIMPLE算法(Semi Implicit Method for Pressure Linked Equation)[16];動量、能量以及湍流參量的求解先采用一階迎風模式(First Order Upwind)使其收斂,在此基礎上采用二階迎風模式提高計算結果的精度。固體域加熱功率采用源項,給定生熱率;計算流體進口采用速度入口條件,給定流體流速、溫度及相應的湍流條件;出口采用壓力出口邊界條件。
根據表1給出的雙加熱濕度傳感器模型的材料特性等參數,設定影響其熱環境的溫度、風速等計算參數,完成數值模擬計算。
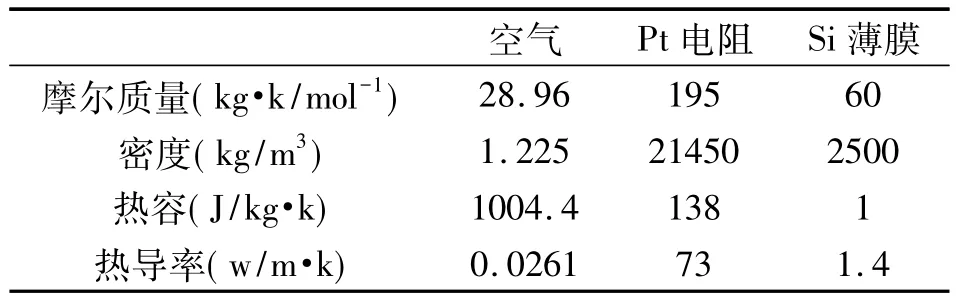
表1 雙加熱濕度傳感器的材料特性(地面)
2 結果分析與討論
2.1 間距對傳熱的影響
由于兩個濕度傳感器間距離過大不僅會導致雙加熱濕度傳感器尺寸變大,而且也會造成支架和封裝過大,因此需減小濕度傳感器間距離。然而減小間距會使得傳感器之間相互影響作用加強,給測量帶來較大的誤差,因此需對傳感器間距離進行優化。
由于空氣隨海拔高度的增加而變得稀薄,散熱將變差,所以在散熱最差的32 km高空處對其中一個濕度傳感器進行加熱時影響另一個測量的概率最大。故本文對32 km高空處傳感器溫度分布進行模擬。當雙加熱濕度傳感器位于高空32 km處時,0.06 W的加熱功率即可將其溫度維持在T2,所以將加熱功率設置為 0.06 W。通過 FLUENT 對 0.5 mm、1 mm、2 mm、3 mm四個間距下的雙加熱濕度傳感器進行了熱數值模擬,得到不同間距下雙加熱濕度傳感器的溫度場分布圖(溫度單位為開爾文)如圖6所示。
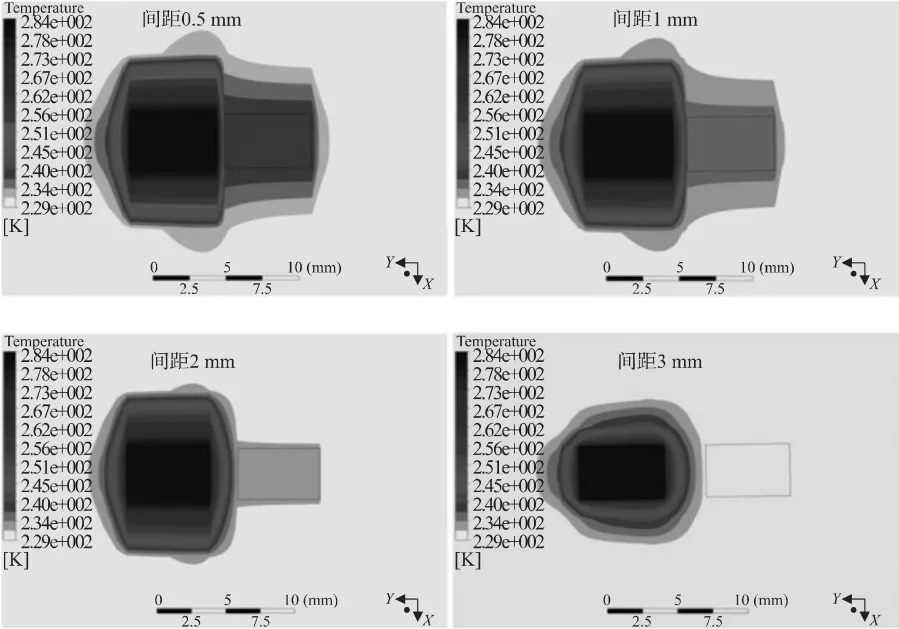
圖6 4個不同間距下溫度分布圖
從間距為0.5 mm、1 mm、2 mm的溫度分布圖中可以看出,由于空氣對流傳熱的存在,其中一個濕度傳感器進行加熱烘干工作時,另一個的溫度相對于環境溫度有所升高。當測量濕度的傳感器溫度比環境溫度高時,就會使其測得的相對濕度有所降低,存在一定的誤差。然而間距達到3 mm時,對一個濕度傳感器進行加熱時,另一個傳感器溫度仍保持與環境溫度相同,所以其測得的結果相比于間距為0.5 mm、1 mm、2 mm較準確。通過對雙加熱濕度傳感器間的四個不同間距進行FLUENT熱數值模擬,可以看出,在探空儀上升速度為6 m/s的條件下,只有當兩個濕度傳感器間距離不小于3 mm時,兩個濕度傳感器才不會相互影響。但是考慮到雙加熱濕度傳感器、支架和封裝應當盡可能的小,間距取3 mm~5 mm。
2.2 升溫時間與冷卻時間
不同海拔高度升溫時間與冷卻時間均不同,兩者都制約著雙加熱濕度傳感器能否正常工作。例如加熱段加熱功率一定時,若升溫時間太長,則傳感器由于升溫過高而引起過熱會導致濕敏材料改性,從而無法得出準確結果;反之,傳感器溫度達不到烘干溫度T2,導致不能烘干傳感器,測量結果仍不準確。若冷卻時間太長,將導致傳感器的測量周期變長,在測量的過程中傳感器可能又會被污染,測量誤差較大;反之,冷卻時間太短,傳感器溫度相比于環境溫度仍較高,同樣測量誤差較大。因此不同海拔高度需對應設置不同的升溫時間與冷卻時間。
升溫時間與加熱功率有密切關系,加熱功率的加載方式不同將得到不同的升溫時間。加熱段的加熱功率可以采用兩種方案,方案一為加載恒定功率;方案二為加載變功率。方案一的特點是不同氣壓下的升溫時間不同。方案二的特點是不同氣壓下的升溫時間可以相同,但是需在濕度傳感器表面放置多個測溫電阻不斷地測量其溫度,并反饋給控制電路,控制電路通過獲知的溫度值來判斷所需提供的加熱功率,這使得測量系統變得復雜。基于此,本文采用恒定功率加載方案。經FLUENT計算可知,在地面處,0.4 W的加熱功率即可將傳感器溫度從T1升高到目標溫度T2,所以加熱段最小加熱功率0.4 W。理論上,縮短升溫時間可以通過增加加熱功率來實現,但是因為探空儀使用電池帶電,要求設計的傳感器滿足低功耗要求,所以本設計采用最大加熱功率0.6 W。加熱功率從0.4 W 至0.6 W,間隔0.05 W。
由圖7(a)可知,加熱功率為0.6 W時,在地面或近地面低空,升溫時間約為5.8 s。升溫時間隨著海拔高度的增加而減小,在32 km高空,升溫時間約為3.8 s。但隨著加熱功率的減小,升溫時間迅速增大。當加熱功率降低至0.4 W時,在地面時,升溫時間高達 19.5 s;在 32 km 高空時,升溫時間約 5.8 s。
從圖7(b)可以看出,雙加熱濕度傳感器的冷卻時間隨著海拔高度的增加呈斜率不斷增大的拋物線關系。在傳感器溫度降幅為40℃條件下,在地面處,冷卻時間為9 s。在32 km高空處,冷卻時間為63 s。隨著溫度降幅的增大,冷卻時間迅速增大,在溫度降幅為48℃的條件下,在地面處,冷卻時間為19 s;在32 km高空處,冷卻時間則高達123 s。
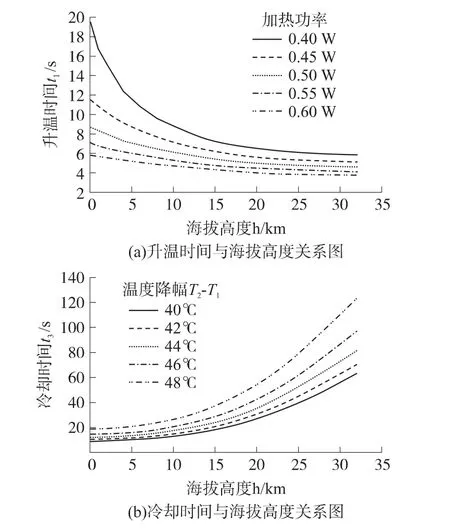
圖7 升溫時間、冷卻時間與海拔高度關系圖
2.3 測量周期
測量周期為4段時間之和,加熱段時間取加熱功率0.5 W時的升溫時間,穩定段時間采用為5 s,冷卻段時間取傳感器溫度降幅為40℃、42℃、44℃、46℃、48℃所需時間,測量段時間為前3段時間之和。圖8為溫度降幅、海拔高度與測量周期間具體關系圖。
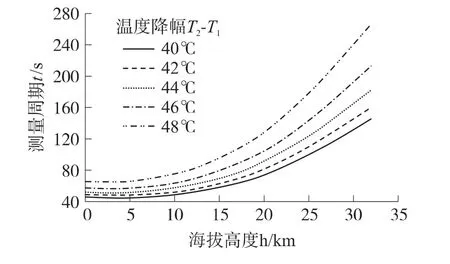
圖8 測量周期與海拔高度關系圖
從圖8可以看出,雙加熱濕度傳感器的測量周期隨著海拔高度增加呈斜率不斷增大的拋物線關系。溫度降幅為40℃時,在地面處,測量周期為45 s;在32 km高空處,測量周期為145 s。溫度降幅為48℃時,在地面處,測量周期為65 s;在32 km高空處,測量周期高達265 s。
2.4 加熱策略
溫度降幅的增大會使得測量周期相應的變長,在測量的過程中雪、冰晶、雨滴等污染物可能又會附著在傳感器表面,導致測量產生較大誤差。溫度降幅的減小會使得傳感器與環境的溫差相應的變大,較大的溫差將導致較大的測量誤差,因此溫度降幅越小,對測量造成的誤差就越大。基于此,須根據應用環境與設計需求,合理選擇測量周期與測量精度。
短期天氣預報一般只考慮低空環境(如0~20 km),然而長期天氣預報一般只考慮高空環境(如20 km~32 km)。在高空條件下,溫度降幅為48℃的測量周期高達265 s,不符合設計要求;在低空條件下,溫度降幅為40℃的測量周期最大為75 s,測量周期符合設計要求,但是其測量精度相對較低。因此本文提出了一種分為低空模式和高空模式的加熱策略。在低空采用溫度降幅為46℃的測量周期,在高空采用溫度降幅為40℃的測量周期。
在低空采用溫度降幅為46℃的測量周期,在近地面處,測量周期大約為58 s,在近20 km海拔高度處,測量周期大約為105 s。在高空采用溫度降幅為40℃的測量周期,在近20 km海拔高度處,測量周期大約為75 s,在近32 km海拔高度處,測量周期大約為145 s。測量周期符合設計要求,測量精度較高。
3 不同簡化模型對比
忽略PCB板的簡化模型網格數較少,顯著減小了計算量,但是其合理性缺乏驗證。考慮PCB板的簡化模型符合實際物理模型,但其計算量相對較大。圖9是對兩種不同簡化模型進行仿真得到的升溫時間及冷卻時間與海拔高度的關系圖。
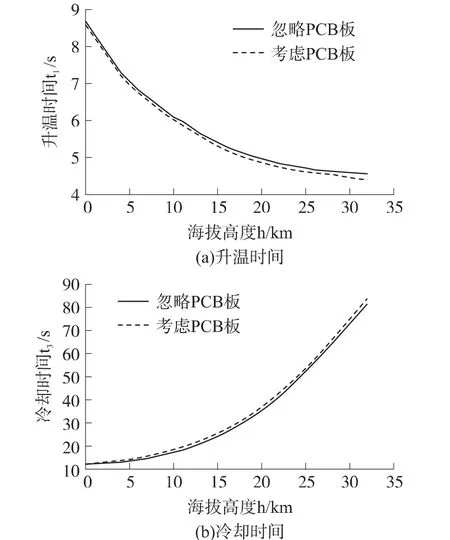
圖9 忽略引線及PCB板與考慮引線及PCB板的升溫時間及冷卻時間
從圖9可以看出,忽略PCB板與考慮PCB板的升溫時間之差、冷卻時間之差均隨著海拔高度增加逐漸變大。低空條件下,升溫時間相差0.8%,冷卻時間相差0.6%;高空條件下,升溫時間相差3.6%,冷卻時間相差2.8%。由于升溫時間之差、冷卻時間之差兩者均變化較小,則測量周期變化較小,因此忽略PCB板對實際影響不大。為了減小計算量,選擇忽略PCB板的簡化模型具有一定的合理性。
4 結論
本文通過FLUENT對雙加熱濕度傳感器在不同氣壓條件下(地面到32 km高空)進行熱數值模擬分析,獲得了不同氣壓處傳感器測量周期,得到以下結論:
(1)不同氣壓條件對傳感器的升溫時間與冷卻時間有著明顯的影響。根據計算結果表明,升溫時間隨著海拔高度增加呈斜率為負值且不斷增大的拋物線關系,冷卻時間隨著海拔高度的增加呈斜率為正,且不斷增大的拋物線關系。不同海拔高度需設置不同的升溫時間與冷卻時間。
(2)在探空儀上升速度為6 m/s的條件下,當濕度傳感器間的距離不小于3 mm時,對一個濕度傳感器進行加熱時,對另一個的測量不產生影響。
(3)形成了高空模式和低空模式的加熱策略,在該方案下雙加熱濕度傳感器的測量周期達到了數秒級,加熱功率最大0.6 W,實現了不間斷測量且精度較高的同時也符合低功耗要求。
本文研究的模型相對簡單,有部分因素被簡化:壓焊塊(壓焊塊的傳熱相對于整個模型的傳熱較少,因此在模型中忽略了壓焊塊傳熱的影響)、引線和PCB板(根據對比研究發現忽略與考慮PCB板和引線的兩個簡化模型計算結果相差不大,為了減小計算量,在研究中忽略PCB板和引線對傳熱的影響)等,將在后續研究中逐步細化模型,使之能更好地符合高空探測的真實環境。
[1]張廣慶,趙成龍,秦明.MEMS電容式濕度傳感器后處理工藝研究[J].傳感技術學報,2011,24(9):1253-1255.
[2]車勝利.濕度傳感器在自動氣象站中的應用[J].氣象水文海洋儀器,2005,3(4):16-17.
[3]金建東,鄭麗,王震.MEMS技術在集成加熱功能的雙模塊濕度傳感器中應用研究[J].計測技術,2010,30(增刊):26-28.
[4]楊世銘,陶文銓.傳熱學[M].北京:高等教育出版社,2006:197-202.
[5]余柏林,龔漢東,王穎.基于玻璃的流量傳感器研究[J].傳感技術學報,2010,23(11):1546-1549.
[6]葉佳敏,張濤.浮子流量傳感器的仿真研究[J].傳感技術學報,2008,21(1):56-60.
[7]Christian Kral,Anton Haumer,Matthias Haigis,et al.Comparison of a CFD Analysis and a Thermal Equivalent Circuit Model of a TEFC Induction Machine with Measurements[J].IEEE Transactions on Energy Conversion,2009,24(2):809-818.
[8]Andrew J Skinner,Martin F Lambert.Evaluation of a Warm-Thermistor Flow Sensor for Use in Automatic Seepage Meters[J].IEEE Sensors Journal,2009,9(9):1058-1067.
[9]Li Dan,Li Ting,Zhang Dacheng.A Monolithic Piezoresistive Pressure-Flow Sensor with Integrated Signal-Conditioning Circuit[J].IEEE Sensors Journal,2009,11(9):2122-2128.
[10]楊易,金新陽,楊立國,等.高層建筑群行人風環境模擬與優化設計研究[J].建筑科學,2011,27(1):4-8.
[11]李磊,張立杰,張寧,等.FLUENT在復雜地形風場精細模擬中的應用研究[J].高原氣象,2010,29(3):624-628.
[12]ANSYS ICEM CFD Help Navigator[Z],2006,3.2.1.
[13]NOAA,NASA,USAF,et al.U.S.Standard Atmosphere[M].Washington,D.C.:U.S.Government Printing Office,1976:53-63.
[14]彭小勇,顧煒莉,柳建祥,等.低速氣體流動不可壓縮性理論解析[J].南華大學學報(自然科學版),2004,18(3):34-36.
[15]王福軍.計算流體動力學分析-CFD軟件原理與應用[M].北京:清華大學出版社,2004:6-7.
[16]約翰D安德森.計算流體力學基礎及其應用[M].北京:機械工業出版社,2010:179-180.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
光學精密工程(2016年6期)2016-11-07 09:07:19
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
核科學與工程(2015年4期)2015-09-26 11:59:03