靜態(tài)施藥模糊控制系統(tǒng)的研究與設(shè)計
2012-10-21 11:16:38方文杰張發(fā)軍
三峽大學(xué)學(xué)報(自然科學(xué)版) 2012年2期
方文杰 張發(fā)軍
(三峽大學(xué) 機械與材料學(xué)院,湖北 宜昌 443002)
農(nóng)作物病蟲草害的防治是人類農(nóng)業(yè)生產(chǎn)中最為普遍的一項農(nóng)事活動,使用農(nóng)藥防治農(nóng)作物病蟲草害,其目的是要用最少量的農(nóng)藥取得最佳防治效果,并且不引起人畜中毒和環(huán)境污染等負面效應(yīng)[1].
目前農(nóng)村使用的施藥機械基本都是20世紀60年代定型的產(chǎn)品,技術(shù)落后,制造工藝粗糙,而實際上,從施藥器械噴灑出去的農(nóng)藥只有25%~50%能沉積在作物葉片上,不足l%的藥劑能沉積在靶標(biāo)害蟲上,只有不足0.03%的藥劑能起到殺蟲作用[1-2].
精確施藥技術(shù)是精確林業(yè)中一個重要的組成部分,其原理是根據(jù)不同施藥對象及要求,通過計算機控制、機器視覺與圖像信息處理等方面的技術(shù)手段對施藥對象的位置、類別和數(shù)量等信息進行處理判斷,自動完成對施藥目標(biāo)的跟蹤、施藥劑量與噴射壓力等方面的調(diào)節(jié)操作,從而實現(xiàn)對目標(biāo)對象的實時動態(tài)作業(yè),以達到精準(zhǔn)而又定量施藥的目的,真正體現(xiàn)了“有的放矢”、“變量供給”的施藥原則.精確施藥技術(shù)的實施可有效避免傳統(tǒng)粗放型農(nóng)、林、牧等行業(yè)的防治消殺作業(yè)中造成的資源浪費,以及減少因采用盲目施藥方法所帶來的環(huán)境污染等問題[3-5].
本文利用模糊控制的方法,來研究與設(shè)計以“3WC-30-G車載式超低容量自動噴霧機”為載體的車載靜態(tài)施藥模糊控制系統(tǒng),不僅為精確施藥研究領(lǐng)域探索出一條新的理論方法,而且具有重要的現(xiàn)實應(yīng)用意義.

圖1 3WC-30-G型車載式超低容量噴霧機
1 靜態(tài)施藥模式施藥控制原理
靜態(tài)施藥模式實際上是一種車載行駛速度為零的施藥方式.其施藥過程是通過選定好具體的施藥對象后,車駛之跟前通過對靶噴頭的自動跟蹤運動來完成對施藥對象不同部位的精確施藥.
在此種模式施藥過程中,對靶噴頭的跟蹤運動軌跡如圖2所示.從圖中可看出,對靶噴頭先根據(jù)施藥對象圖幅輪廓信息空行程到施藥最高起點位置,再根據(jù)實時獲得的圖像處理信息進行水平勻速直線施藥,當(dāng)噴霧到左右施藥邊緣時,對靶噴頭會自動改變仰角而調(diào)節(jié)至下一施藥軌跡,而后改變施藥運動方向.在此邊緣過程中,對靶噴頭會根據(jù)實時獲得的圖像處理信息確定對靶噴頭的拐彎過渡運動軌跡,之后便進行下一循環(huán)施藥過程,直至施藥到終點結(jié)束施藥過程,噴頭再空行程回到原點位置.此過程便完成了對一施藥對象的施藥全過程.

圖2 車載靜態(tài)施藥模式噴頭跟蹤運動軌跡路線圖
因此,在此種模式下的控制系統(tǒng)中,控制輸入變量因素主要表現(xiàn)為實時獲得的施藥對象圖像輪廓信息和對靶噴頭與施藥對象之間的距離大小,再者有控制藥液開啟信號的施藥對象辨別信息;在控制輸出方面主要為對噴頭水平擺角與噴射壓力的控制.
2 車載靜態(tài)施藥模式模糊控制系統(tǒng)設(shè)計
車載靜態(tài)施藥模式是在保持對靶噴頭水平勻速直線運動狀態(tài)的情況下,根據(jù)檢測到的樹冠輪廓冠幅寬度W與噴射距離D控制對靶噴頭的水平擺幅A的變化,同時通過檢測到的噴射距離D值與對圖幅色度因子C值的識別判斷,對噴射壓力PL的大小與施藥開啟信號進行控制,建立車載靜態(tài)施藥模式模糊控制系統(tǒng)原理方框圖如圖3所示.
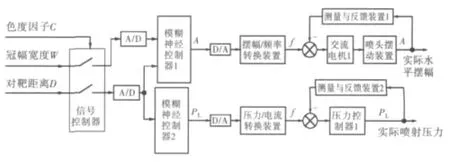
圖3 車載靜態(tài)施藥模式模糊控制系統(tǒng)原理方框圖
從原理框圖中可以看出,3個控制輸入信號先經(jīng)過一信號控制器進行輸入變量的前處理,此信號控制器的作用是根據(jù)輸入變量色度因子C的具體取值(0或1),來控制確定另外兩輸入變量冠幅寬度W 和對靶距離D是否被導(dǎo)通輸入模糊控制系統(tǒng)中.如果色度因子C的取值為零,則另外兩輸入變量冠幅寬度W 和對靶距離D的輸入信號被斷開;如果C的取值為1,則另外兩輸入變量W 和D 的輸入信號被接通輸入.模糊控制器1用來對噴頭水平擺幅A的模糊控制進行模糊近似推理運算;模糊控制器2用來對噴射壓力PL的模糊控制進行模糊近似推理運算.
2.1 控制變量的模糊化處理
根據(jù)實際的樹冠輪廓特征分布信息,冠幅寬度W 的取值范圍為:0.5~3m,在此控制系統(tǒng)的設(shè)計中,用以模糊控制設(shè)計的冠幅寬度輸入值實際上為施藥對象冠幅寬度反映在左邊或右邊的部分,故W 的論域為;同樣,噴射距離D 的取值范圍為:1~5m,則得其論域為.在控制輸出因素方面,取噴頭水平擺角A的取值范圍為:-90°~90°,正負號反映的是噴頭擺至左右位置的區(qū)分,故在模糊控制系統(tǒng)設(shè)計中取其論域為;噴射壓力PL的取值范圍為:3 000~4 000Pa,得其論域為
根據(jù)大量的實踐經(jīng)驗,將各控制輸入、輸出變量的模糊子集描述如下.在控制輸入變量方面有:①冠幅寬度W,將其描述為5個等級:WS(窄)、WM(較窄)、WZ(適中)、WG(較寬)、WB(寬);②噴射距離D,將其描述為5個等級:DS(近)、DM(較近)、DZ(適中)、DG(較遠)、DB(遠).
同樣,對控制輸出變量方面也有:①噴頭水平擺角A,將其描述為5個等級:AS(小)、AM(較中)、AZ(適中)、AG(較大)、AB(大);②噴射壓力PL,將其描述為5個等級:PLS(小)、PLM(較小)、PLZ(適中)、PLG(較大)、PLB(大).
鑒于高斯(Gauss)函數(shù)具有良好的平滑性,各個模糊子集在相應(yīng)論域上的隸屬函數(shù)均采用高斯函數(shù)分布,根據(jù)上述各控制輸入輸出變量模糊隸屬函數(shù)的定義,對各控制輸入、輸出變量的隸屬函數(shù)解析式分別如下所示.

2.2 模糊控制決策規(guī)則
車載靜態(tài)施藥模式模糊控制系統(tǒng)為一個三輸入兩輸出的系統(tǒng),通過分析各控制變量因素的相互關(guān)系,其中對靶噴頭水平擺幅A的控制實際上只與樹冠的冠幅寬度W 與噴射距離D兩個輸入變量因素有關(guān),可以將其設(shè)計為一個兩輸入單輸出的子控制系統(tǒng);同樣,噴射壓力PL的大小也只與噴射距離D一個輸入變量因素有關(guān),亦可以將其設(shè)計為一個單輸入單輸出的子控制系統(tǒng).總結(jié)本行業(yè)領(lǐng)域內(nèi)的實踐經(jīng)驗,同時根據(jù)其各自模糊子集的定義與隸屬函數(shù)的確定,對于對靶噴頭水平擺幅A建立如表1所示的模糊控制規(guī)則.

表1 噴頭水平擺幅A模糊控制規(guī)則表
2.3 模糊近似推理
由表1所示的模糊控制規(guī)則可知,對靶噴頭水平擺幅A模糊控制的完備模糊控制規(guī)則數(shù)有25條,根據(jù)每一條模糊控制規(guī)則都能給出一個模糊蘊涵關(guān)系Ri(i=1,2,…,25),則此模糊控制系統(tǒng)總的模糊蘊涵關(guān)系R是25個Ri的并,即有[6]


假設(shè)某一時刻控制系統(tǒng)的清晰輸入量為:W=2,D=3,根據(jù)以上控制輸入變量隸屬函數(shù)的分布可知,清晰量W=2經(jīng)模糊化后只映射到了模糊子集WM、WZ與WG上;同樣,清晰量D=3經(jīng)模糊化后也只映射到DM、DZ與DG上.由表1所示的對靶噴頭水平擺幅A的模糊控制規(guī)則表可知,這樣的控制輸入量只能激活表1中括弧所示的9條模糊控制規(guī)則,根據(jù)Mamdani模糊蘊涵關(guān)系算法進行近似推理計算出相應(yīng)的系統(tǒng)控制輸出模糊量Ui(a),有:
1)對于控制規(guī)則“if W is WM and D is DM then A is AZ”,可得系統(tǒng)的控制輸出U1(a)有:

(0.22AZ)(a)為0.22與模糊子集 AZ(a)的數(shù)集,故(0.22AZ)(a)也為一模糊子集,其分布如圖4所示.
2)對于控制規(guī)則“if W is WZ and D is DM then

圖4 模糊控制規(guī)則(1)近似推理輸出結(jié)果分布
A is AG”,可得系統(tǒng)的控制輸出U4(a)有:
則(0.22AG)(a)的模糊子集分布如圖5所示.

圖5 模糊控制規(guī)則(4)近似推理輸出結(jié)果分布
3)對于控制規(guī)則“if W is WG and D is DM then A is AG”,可得系統(tǒng)的控制輸出U7(a)有:

模糊控制規(guī)則(7)近似推理輸出結(jié)果分布同圖5所示,其余各模糊控制規(guī)則對應(yīng)的控制輸出均為零.于是,最后總輸出的模糊子集分別為這9個輸出模糊子集的并,則有:U(a)=(a)=(0.22AZ)(a)∪0∪0∪(0.22AG)(a)∪0∪0∪(0.22AG)(a)∪0∪0=(0.22AZ)(a)∪(0.22AG)(a),則總近似推理輸出量的模糊子集為(0.22AZ)(a)與(0.22AG)(a)組成的分布,如圖6所示.

圖6 經(jīng)過近似推理后輸出量的模糊分布
2.4 解模糊
經(jīng)過近似推理后的控制輸出量仍然是模糊變量,解模糊化的方法,如前面所述的有很多種,這里選用了應(yīng)用比較廣泛的面積重心法對近似推理輸出進行清晰化處理[6].
如圖6所示,U(a)不是連續(xù)的函數(shù),這就要求對U(a)的曲線各部分進行分段處理,取U(a)總的自變量a的變化范圍為,則可將其分為3段的自變量區(qū)間分別為:與,相應(yīng)的a1與a2可通過如下方法求得.

則根據(jù)面積重心法的計算公式,有


3 車載靜態(tài)施藥模式模糊控制系統(tǒng)仿真
利用Matlab里的模糊控制仿真模塊分別設(shè)計出相應(yīng)的模糊推理控制器,再根據(jù)靜態(tài)施藥模式模糊控制系統(tǒng)的原理框圖,建立模糊控制系統(tǒng)的仿真圖如圖7所示.為了便于在對比示波器中能同時很好地觀察到控制輸出變量與控制輸出變量之間的關(guān)系,在仿真圖的設(shè)計時,有意地把輸入變量在導(dǎo)入對比示波器之前進行了相應(yīng)幅值的放大與上下方位的移動.同時,為了觀察控制輸入變量動態(tài)變化的特點,在模擬控制輸入變量信號時,均采用了一常數(shù)值與一信號發(fā)生器相合成的方式,在信號發(fā)生器里可以取不同的信號變化來動態(tài)地模擬控制輸入變量的變化.

圖7 靜態(tài)施藥模式模糊控制系統(tǒng)仿真圖
經(jīng)過仿真,可得對靶噴頭水平擺幅A的模糊控制推理輸入、輸出量關(guān)系曲面圖與模糊控制系統(tǒng)仿真圖,分別如圖8與圖9所示.


從控制輸入與輸出量曲面關(guān)系圖可看出,控制輸出變量隨各控制輸入變量的改變而變化連續(xù)且平滑,輸入與輸出量之間的對應(yīng)關(guān)系也很合理.從模糊控制系統(tǒng)仿真輸出結(jié)果可以看出,各模糊控制響應(yīng)速度快,控制輸出幾乎無滯后,控制效果也很穩(wěn)定,基本無振蕩與超調(diào)的現(xiàn)象.
當(dāng)取樹冠寬度W 的值為2,且對靶距離D的值為3時,經(jīng)過模糊控制系統(tǒng)推理運算后,可得對靶噴頭水平擺幅A的值為34.6,如圖10所示,這與前面式(2)計算理論計算出來的結(jié)果基本相近.

圖10 靜態(tài)施藥模式水平擺幅A模糊推理狀態(tài)圖
4 結(jié) 語
本文以“3WC-30-G車載式超低容量自動噴霧機”為研究載體,具體分析了其靜態(tài)施藥控制原理,再根據(jù)模糊控制的理論知識,結(jié)合實踐的知識經(jīng)驗,對其各控制變量進行模糊化處理與模糊控制規(guī)則確立,建立其靜態(tài)施藥模式模糊控制系統(tǒng)原理框圖,經(jīng)過理論計算與軟件仿真實驗表明:基于模糊控制方法的靜態(tài)施藥模式模糊控制系統(tǒng)響應(yīng)速度快,幾乎無滯后,控制結(jié)果也很理想,控制效果很穩(wěn)定,基本無振蕩與超調(diào)的現(xiàn)象.
[1] 孫文峰,王立君,陳寶昌,等.農(nóng)藥噴施技術(shù)國內(nèi)外研究現(xiàn)狀及發(fā)展[J].農(nóng)機化研究,2009(9):225-228.
[2] 趙今凱.我國植保機械的應(yīng)用現(xiàn)狀及發(fā)展建議[J].農(nóng)業(yè)技術(shù)與裝備,2011(1):32-33.
[3] 徐映明.農(nóng)藥施用技術(shù)[M].北京:化學(xué)工業(yè)出版社,1999:23-25.
[4] 袁會珠.農(nóng)藥使用技術(shù)指南[M].北京:化學(xué)工業(yè)出版社,2004:78-80.
[5] 張發(fā)軍.車載噴霧機及精確施藥關(guān)鍵技術(shù)研究[D].武漢:武漢理工大學(xué),2008.
[6] 石辛民,郝整清.模糊控制及其 MATLAB仿真[M].北京:清華大學(xué)出版社,2010:47-49.
猜你喜歡
美與時代·美術(shù)學(xué)刊(2022年3期)2022-04-27 01:18:15
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
數(shù)學(xué)小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
火花(2019年12期)2019-12-26 01:00:28
人大建設(shè)(2019年12期)2019-05-21 02:55:32
幸福(2018年33期)2018-12-05 05:22:42
Coco薇(2017年11期)2018-01-03 20:59:57
暨南學(xué)報(哲學(xué)社會科學(xué)版)(2016年9期)2017-01-15 13:52:02
中國科技信息(2016年14期)2016-07-31 21:16:32
學(xué)苑創(chuàng)造·A版(2015年11期)2016-01-14 09:03:27
