自治式海洋環境監測系統的低功耗設計
2012-10-23 03:01:58劉素花李思忍徐永平
海洋科學 2012年7期
劉素花, 李思忍, 徐永平
(1. 青島理工大學, 山東 青島 266520; 2. 中國科學院 海洋研究所, 山東 青島 266071)
自治式海洋環境監測系統的低功耗設計
劉素花1, 李思忍2, 徐永平2
(1. 青島理工大學, 山東 青島 266520; 2. 中國科學院 海洋研究所, 山東 青島 266071)
針對海洋環境監測系統中供電電池組有限儲能與儀器長期工作之間的矛盾, 進行了自治式海洋環境監測系統的低功耗研究。從節能降耗、充分利用水體能源出發, 將定點錨泊潛標和浮標技術相結合, 采用雙浮體技術, 基于能量守恒, 研制了一種儲能型的傳動裝置; 在分析了影響系統功耗的各種因素的基礎上, 對單片機數據采集控制存儲系統進行了低功耗設計, 為海洋環境監測系統長期在位作業提供了有力的能源保證, 很好地解決了海洋環境監測系統的能源供應問題, 使得該系統可以依靠單一的傳感器組完成深達55 m以上的水體次表層海洋要素的長期連續垂直剖面觀測。
低功耗; 節能; C8051F340單片機; 海洋環境
海洋因其地理空間的廣袤性和自然環境的復雜性, 使得對海洋大范圍、長時間地連續監測非常困難,目前采用的主要手段是各種潛標、浮標系統和其他一些自容式監測儀器[1]。由于工作環境的特殊性, 從外部給這些監測系統提供驅動電源的成本很高, 或者是從技術層面和實際操作上根本不可能實現系統的外部供電。所以, 海洋監測儀器基本上都是采用自備電源, 也就是采用蓄電池對系統進行供電。這些電池供電系統都希望能在無人干預的情況下工作時間越長越好, 而這和電池組的有限儲能產生了矛盾,因此低能耗系統設計就具有重要的意義, 可以延長系統的工作周期, 降低運營成本。對電路系統而言,低功耗設計可以降低系統熱耗散, 提高系統的穩定性和可靠性。
自治式海洋環境監測系統在保證系統功能的前提下, 還應滿足低功耗、連續工作時間長、體積小、質量輕、高可靠性的要求。測量、控制、通信、內耗等都需要能源, 因此, 在能源供給體積及容量有限的制約條件下, 充分利用水體能源及系統自身的能量, 最大限度地減少能耗, 最大限度地延長作業時間, 是研制自治式海洋環境監測系統努力實現的目標。為此, 研制高效節能的驅傳動系統、選擇微功耗的元器件、設計低功耗的單片機測量控制電路、減少高頻工作時間、降低機械系統和電源的內耗、選擇最佳的控制模式等, 是實現自治式海洋環境監測系統低能耗所采取的主要措施。本文分別從機械設計和電氣設計兩個方面對自治式海洋環境監測系統的低功耗進行了研究, 為解決長期在位作業的海洋環境監測系統的能源供應問題提供了一種新方案。
1 自治式海洋環境監測系統的雙浮體設計
自治式海洋環境監測系統主要由剖面測量平臺(以下簡稱小浮體)、潛標式主浮體和錨泊系統三部分組成。主浮體平臺位于水面以下55 m的地方, 是自治式海洋環境監測系統的主要組成部分, 不僅是兩個運動平臺之一, 而且還是小浮體和錨泊系統的連接樞紐, 其上部連接著小浮體, 下部連接錨泊裝置錨固在海底。同時主浮體平臺也是系統能量轉換傳動裝置和控制裝置的搭載主體, 包括外殼、傳動儲能機構、數據采集控制機構、浮力系統等組成部分。小浮體是所有測量傳感器的載體, 由架體、浮球、測量設備等組成。它可以根據需要搭載各類傳感器, 進行海洋次表層水質等多參數的立體連續測量[2], 能夠在海表面和主浮體潛伏的位置之間進行循環升降運動。本系統設計測量范圍為海面下5~55 m。錨泊系留系統由重力錨塊、錨鏈、釋放器、輔助浮球、轉動鏈接環和特制包塑錨泊纜等組成。系統總體結構如圖1所示。
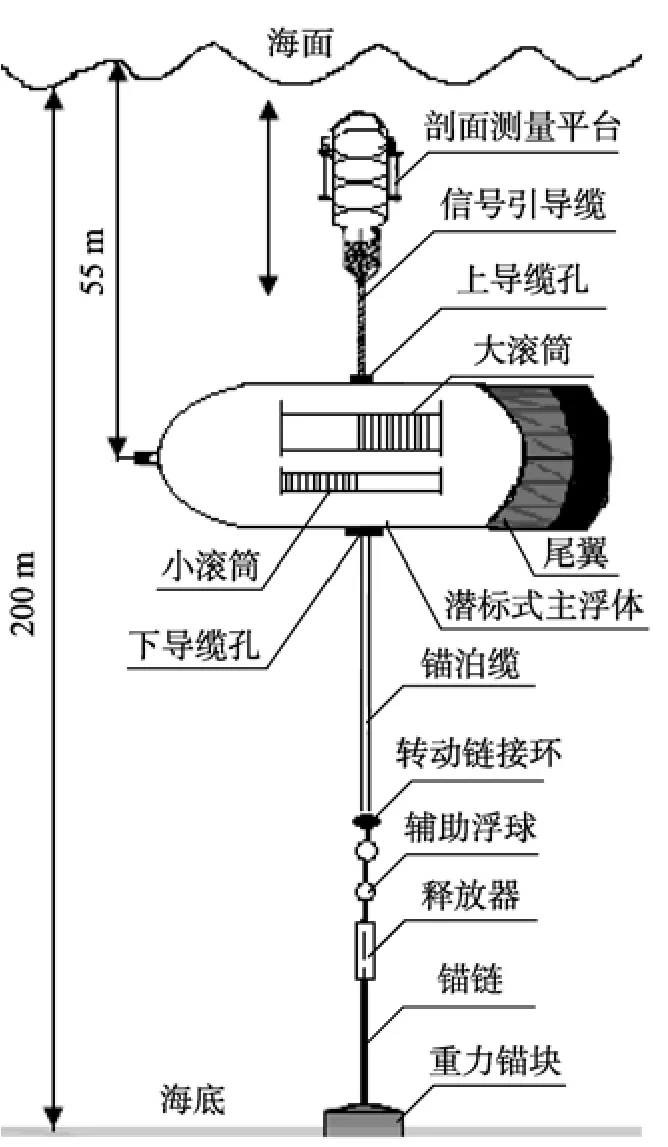
圖1 自治式海洋環境監測系統結構圖Fig. 1 Configuration of the autonomous ocean environment monitoring system
自治式海洋環境監測系統采用雙浮體設計, 通過驅傳動機構之間的配合使得兩個浮體在海水中上下運動, 由主浮體建立一個水體中層平臺, 剖面測量從這個平臺向上開始, 通過小浮體搭載傳感器升降, 這本身就降低了功耗。設計的自治式海洋環境監測系統最大布放深度 200 m, 海洋要素最大剖面測量距離55 m, 小浮體最小有效載荷20 kg。系統可連續工作 1 a以上, 能夠進行定時采集和存儲水文數據。
系統長期連續工作, 即使小浮體每天上浮、下潛各一次, 它所需要的能量也非常巨大。為此, 整體系統的低功耗設計非常重要。系統在機械設計方面采用了節能型的鉸接拉緊傳動裝置及雙浮體技術, 充分利用水體及系統本身的能量, 為系統長期運行提供了能源保證。在電氣控制中, 采用全速 USB FLASH微控制器 C8051F340, 設計了高度集成的低功耗、高可靠的數據采集控制存儲器, 并進行了單片機系統的低功耗設計。
2 自治式海洋環境監測系統的儲能傳動系統設計
2.1 儲能傳動裝置
兩浮體在水中具有正浮力, 我們設定浮體上升時浮力對該浮體所作的功為正, 浮體下降時, 浮力所作的功為負。浮體從某點A在浮力作用下上升到另外某一點B后, 又克服浮力下潛到起始點A。兩次行程浮力所做的功大小相等, 方向相反。我們可以認為, 浮力對于浮體從A點到B點又回到A點的過程中所作的功為零, 在此過程中, 浮體消耗的功也為零。為了將小浮體上升時浮力所做的功儲存起來, 在小浮體下降時釋放存儲的功, 我們設計了一個雙滾筒裝置, 兩滾筒直徑不等, 之間通過鏈傳動齒輪連接。主浮體和小浮體之間的纜繩纏繞在大滾筒上, 主浮體和錨泊系統之間的纜繩纏繞在小滾筒上。大滾筒旋轉放出的纜繩帶動小浮體上升的同時小滾筒旋轉收進纜繩帶動主浮體下潛。大小滾筒的直徑比(周長比)和小浮體與潛標主浮體浮力比成反比。假設D1,D2,F1,F2分別表示大、小滾筒的直徑及主浮體、小浮體在水中所受的浮力, 則有D1/D2=F1/F2, 即D1F1=D2F2, 推斷出小浮體測量平臺上升所作的功和主浮體下降所作的功大小相等,方向相反。同理,小浮體下降所作的功和主浮體上升所做的功相等。整個系統的工作原理利用了系統的能量守恒定律, 如圖 2所示。兩個同等質量的物體懸掛于一根經過滑輪轉向的繩索兩端, 當滑輪轉動時, 一個物體上升,另一個物體下降, 在理想狀態下, 如果忽略滑輪的摩擦力, 重力對于上升物體和下降物體所做的功大小相等, 方向相反。即沒有外力作用下, 一個物體上升的同時另外一個物體下沉。我們可以認為重力對下降物體所作的功通過繩索傳遞給上升物體成為克服重力上升所做的功。
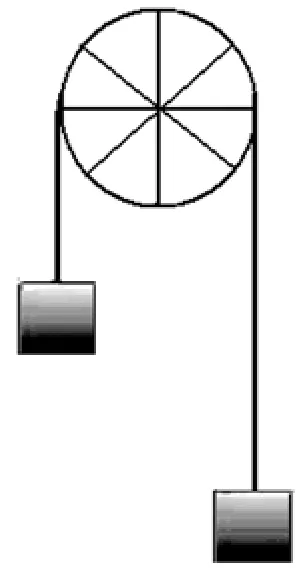
圖2 儲能傳動系統原理Fig. 2 Operating principle of the energy-conserving transmission system
基于此原理, 我們設計了自治式海洋環境監測系統的節能傳動系統。該系統由雙浮體組成, 浮體之間通過傳動儲能裝置連接。該傳動儲能裝置可以讓一個浮體上升的過程中另外一個浮體下降。浮力對小浮體測量平臺上升所做的功通過傳動儲能裝置提供給主浮體作為下降克服浮力所做的功[3-4]。反之,浮力對主浮體上升所做的功通過傳動儲能裝置轉換為小浮體下降所做的功。系統內設電機驅動系統, 可以提供微小擾動, 破壞系統平衡, 使浮體按照設定程序上下運動, 采集測量數據。因此該系統不消耗系統本身的能源就可以完成測量平臺的上升和下降過程。以上結論建立在系統沒有受到水流影響, 系統傳動摩擦損耗為零的理想狀況下。
當小浮體全部下潛到水下時, 它是一正浮力浮體, 上升時可以依靠自身正浮力驅動, 理論上不需要外加電源。因此, 為降低能耗, 海洋要素的采集與存儲是在小浮體上升過程中完成的。但系統在實際運行過程中, 由于水體重力、慣性力、粘性力及系統存在的機械摩擦力, 不可避免地會損失一些能量,所以在小浮體下潛過程中需外加電源補充少量能量。
2.2 驅動裝置
電機驅動系統由外殼、電機、電源、電路 PCB板、內齒輪、外齒輪、外支架、內支桿、端蓋等組成。電機驅動系統是一種自含式機構, 位于主浮體平臺的大滾筒內, 利用大滾筒作為電機的水密外殼。此外殼又作為儲能轉換裝置中小浮體信號引導纜的繞線滾筒, 這樣既節省了空間, 又簡化了能量傳遞, 增加了系統運行的穩定可靠性。小浮體由信號引導纜牽引, 受電機驅動系統的驅動和控制。密封艙內部中心軸處通過兩個端蓋架著一根長軸, 電機和電源集成所構成的懸錘就懸掛在長軸的下端, 同時驅動電機通過齒輪和滾筒作用。當驅動電機軸轉動時,軸上的齒輪就會帶動艙體端蓋上的內齒輪轉動, 由于電池重力較大, 垂直指向地心, 電機軸的位置幾乎不動, 從而帶動端蓋轉動, 而端蓋與整個密封艙外殼是固定在一起的, 這樣, 電機的轉動就帶動整個滾筒轉動, 大小滾筒間通過齒輪鏈接, 從而帶動整個儲能轉換裝置進行運轉。電機驅動裝置采用靜密封技術, 解決了動密封技術產生的摩擦會損耗大部分能量的消耗和動密封易滲漏的問題, 降低了能量損耗。驅動機構拆掉密封筒后其結構示意圖如圖 3所示。

圖3 驅動機構結構圖Fig. 3 Drive installation with winch drum case removed
驅動機構和小滾筒之間的能量傳遞選用具有高效水下傳動性能的鏈傳動。由于鏈傳動有縫隙可以讓水流暢通過, 從而減少了水體阻力及摩擦力。
3 單片機數據采集控制存儲系統的低功耗設計
功耗是一個系統的問題, 以單片機為核心構成的系統其總能耗是由單片機能耗及其外圍電路能耗共同構成的。單片機系統的低功耗設計需要從硬件設計和軟件設計兩方面綜合考慮。
C8051F340單片機為完全集成的混合信號片上系統型MCU[5], 工作電壓2.7~3.6 V, 典型值為3.3 V,它擁有靈活的時鐘硬件, 具有 IDLE、STOP、SUSPEND低功耗模式, 可以方便地在高效運作模式和低功耗模式間進行轉換, 且有多種時鐘方案可供選擇。C8051F340單片機內置高速振蕩器和低速振蕩器, 還可外接振蕩器, 每種振蕩器模式下有多種頻率可選, 不同的時鐘模式可以實時切換, 便于進行低功耗控制。C8051F340單片機還可以在 5個系統時鐘周期內即可實現中斷響應, 大大節省了等待功耗。C8051F340單片機的I/O端口資源豐富, 設置靈活, 可以根據實際需要利用軟件通過相關寄存器的設置來配置I/O端口的I/O方式, 及時關閉片上沒有用到的外設。
單片機內部的總電流消耗分為工作電流和漏電流, 這些電流在轉換為系統所需要的其他能量形式的同時, 有相當一部分轉換成熱能。低電壓供電可以大大降低系統的工作電流, 并且工作電流和時鐘頻率近似為正比的關系, 降低時鐘頻率, 就可以有效降低單片機的功耗, 因此, 要降低單片機系統的功耗, 就要降低系統的工作電壓及運行頻率。基于以上分析, 在保證系統安全可靠的前提下, 在硬件選擇和設計中, 選用C8051F340單片機做主控芯片, SSR固態繼電器做主開關器件, 通過單片機的 SPI0串口外掛SD存儲卡海量存儲數據, 利用串口轉換芯片及多路選擇開關分時選通傳感器。傳感器選用成熟的集成式數字傳感器, 自帶電源。通過電源管理模塊分別給CPU、SD存儲卡、串口轉換模塊及開關控制裝置等提供相應的工作電壓[6]。由于工作電壓通常是恒定的, 因此, 要減小工作電流來降低系統的總功耗,是通過減小平均工作電流來實現的。平均工作電流是系統在單位時間內消耗的電荷量。在此系統設計中, 其總的運行時間分為兩部分: 高頻高效工作期和低頻低功耗休眠期。MCU在高效工作期的電流較大, 一般 15 mA, 而休眠期的電流很小, 一般只有74 μA。平均工作電流是系統在這兩部分時間內的總電荷量除以對應時間所得的平均值。所以為了減小平均工作電流, 就必須縮短高效工作期的時間, 盡量延長休眠時間[7-8], 為此, 利用 C8051F340單片機靈活的時鐘硬件, 使用雙時鐘方案, 設計了一個高速運作模式和低速休眠模式。CPU在處理事件(采集存儲數據及實施開關控制等)時使用內部24 MHz高速晶振, 休眠時切換到外部10 kHz低速振蕩器, 并關閉除了T2定時器以外的所有外設。也就是說, 系統采用工作-休眠-工作-休眠……的循環工作方式并使外設分時離散工作來達到減小平均工作電流,降低系統總功耗的目的。部分程序流程圖如圖4、圖5、圖6所示。
硬件低功耗設計離不開軟件的配合, 盡量將硬件應用的低功耗特性反映在軟件中。本軟件設計中,使用“中斷”方式來響應處理事件, 盡量減少 CPU的運算量, 使用短的數據類型和字符型的8位數據, 并避免浮點數運算, 讓I/O模塊間歇運行, 端口配置成漏極開路方式, 用PUSH-PULL方式驅動LED, 未用的I/O引腳設置成輸出或輸入, 并用外部上拉電阻拉高。不用的I/O模塊或間歇使用的I/O端口及時關閉,充分利用開關控制信號, 只在必要時選通激活相應的外設[9-10]。
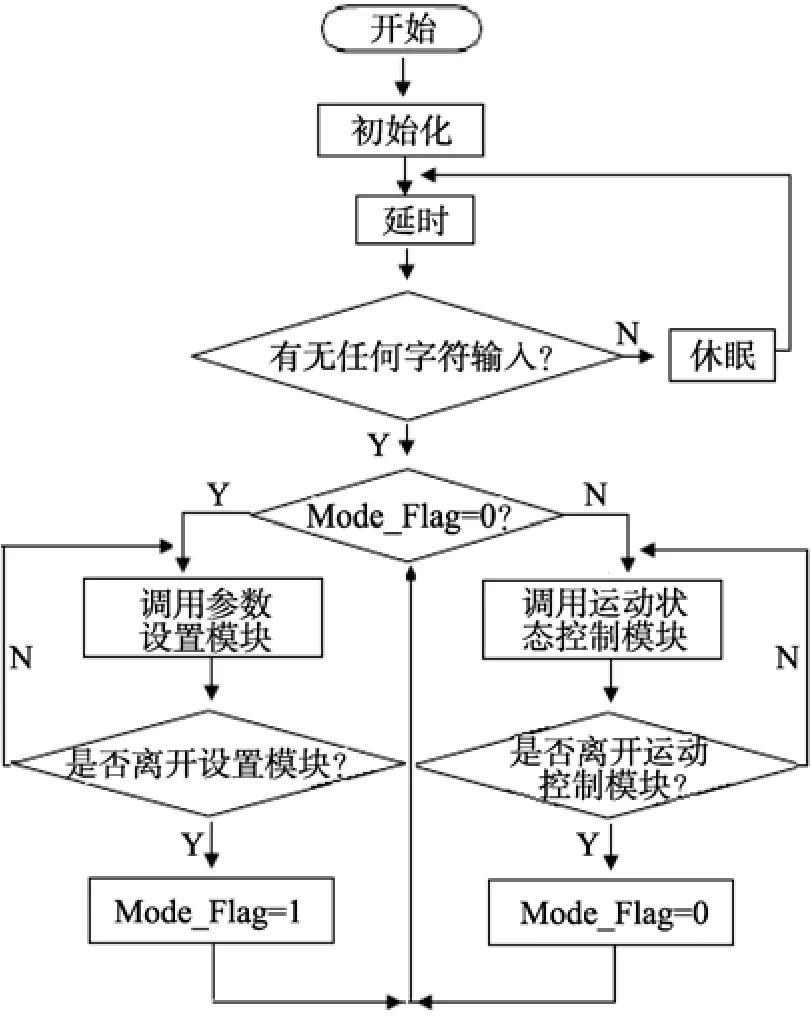
圖4 主程序流程圖Fig. 4 Flowchart of the main program
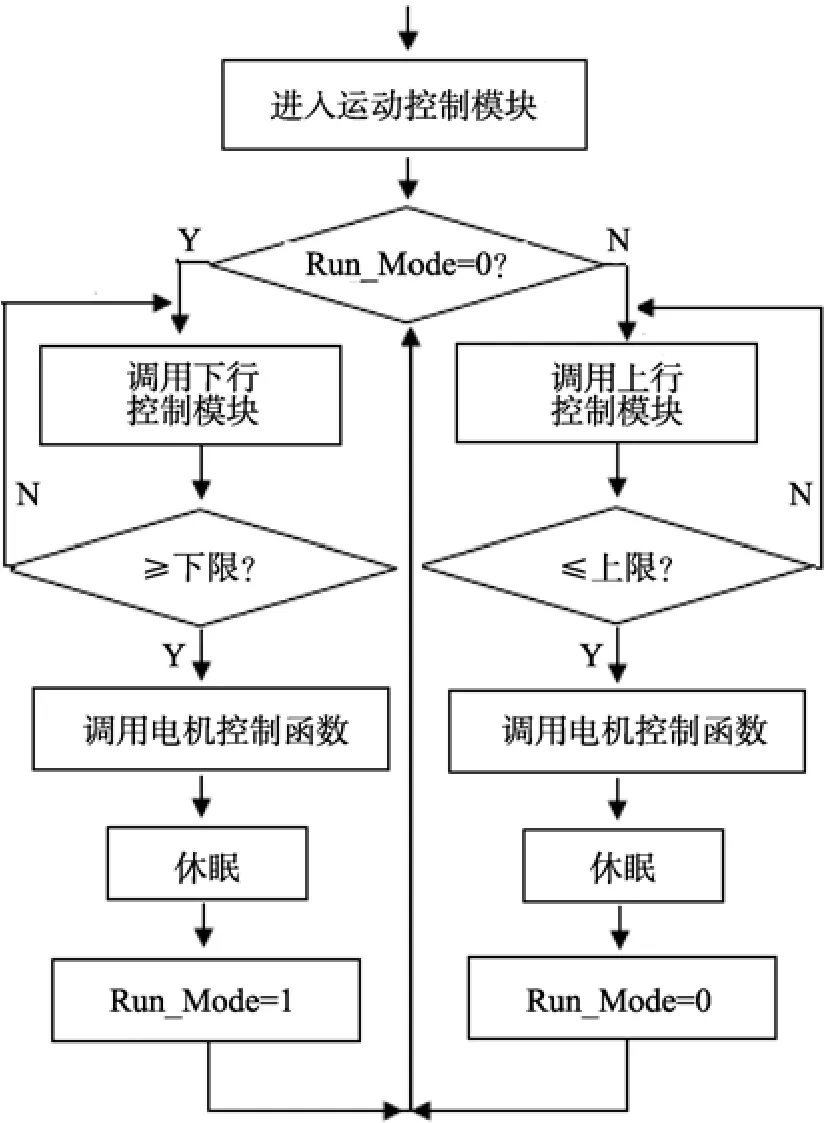
圖5 運動狀態控制模塊流程圖Fig. 5 Flowchart of the control module for the movement mode
在實驗室對單片機系統進行測試, 靜態電流消耗約為7 mA, 工作電流80 mA, 完全可以滿足系統要求。
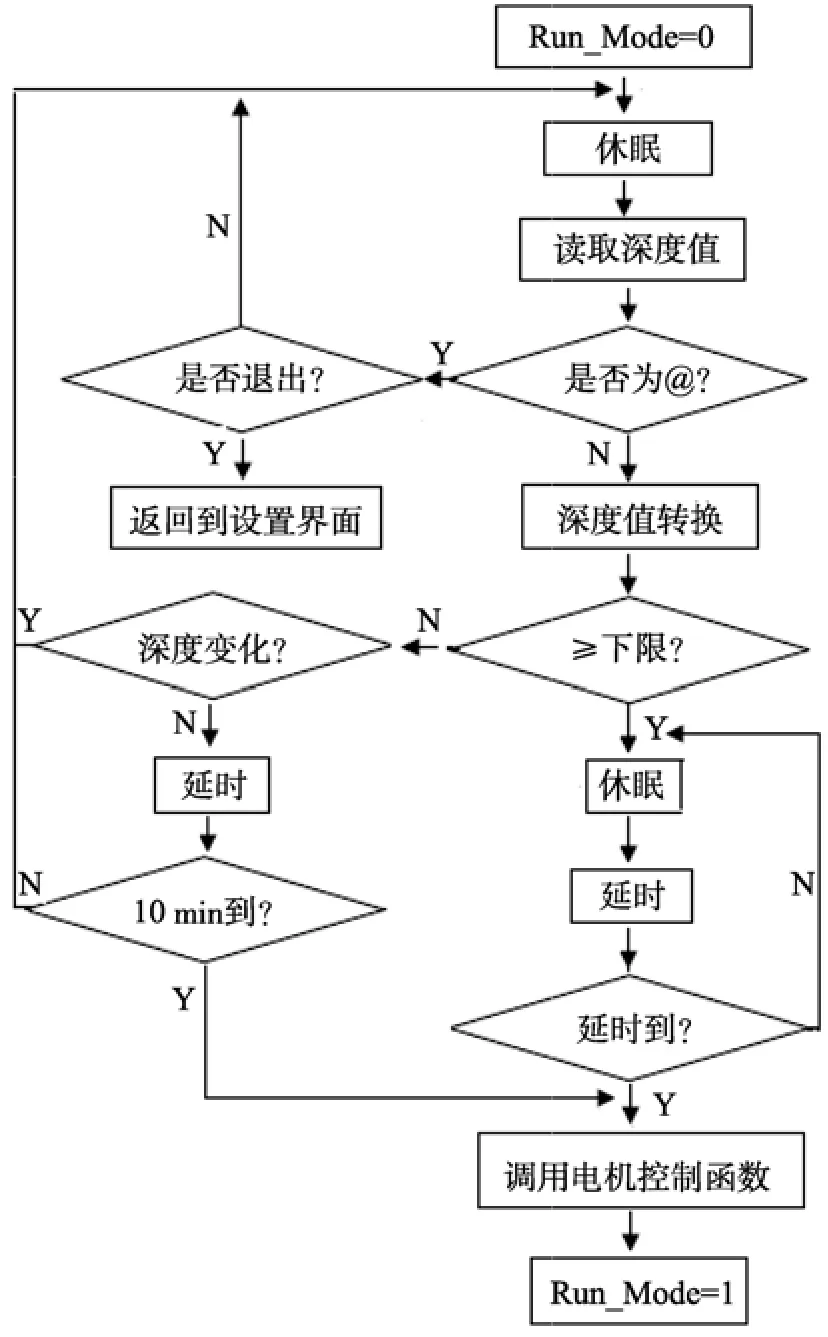
圖6 下潛過程運動流程圖Fig. 6 Flowchart of the submerging movement
4 結論
自治式海洋環境監測系統通過引入儲能型的傳動裝置及對單片機嵌入式系統進行低功耗設計, 實現了無人值守情況下對海洋要素垂直剖面的長期連續觀測, 滿足了海洋學研究、海上工程建設前期調查和海洋軍事上的需求, 提高了人類原位長期持續觀測海洋環境變化的能力, 是對傳統測量方法的有益補充。從以上介紹可以看出此監測系統具有以下特點: (1)具有安全連續性。系統采用雙浮體耦合技術,利用小浮體搭載成熟的集成式傳感器, 根據事先設定的程序進行 5~55 m任意深度安全連續地升降,可以全天候工作, 具有多參數測量以及單一傳感器的垂直剖面連續測量等多用途的特點。(2)具有高效節能性。系統利用儲能傳動裝置, 實現了水體壓力能及位能的直接轉化, 大大減少了后續維護和對動力電源的需求, 保證了系統運行的長期穩定性。此裝置可以應用于不同海域、不同海況下。(3)具有低功耗、高可靠性。單片機數據采集控制存儲系統的低功耗設計, 使得系統可以長期自動監測海洋環境, 具有自治功能。
[1] 羅續業, 周智海, 曹東, 等. 海洋環境立體監測系統的設計方法[J]. 海洋通報, 2006, 25(4): 69-77.
[2] Gong Dejun, Chen Yonghua, Li Siren, et al. A moored underwater energy conservation system for profiling measurement[J]. China Ocean Engineering, 2007, 21(3):541-548.
[3] 馬崢, 張華, 張楠, 等. 水下滑翔機滑翔運動的能量分析及水動力性能研究[J]. 船舶力學, 2006, 10(3):53-60.
[4] 陳建秋. 雙浮體—棘輪式波浪能發電裝置[J]. 能源研究與利用, 2001, 3: 20-21.
[5] 鮑可進. C8051F單片機原理及應用[M]. 北京: 中國電力出版社, 2006.
[6] 劉素花, 龔德俊, 徐永平, 等. 基于單片機的海洋環境監測系統的控制電路設計[J]. 海洋科學, 2009,33(8): 67-71.
[7] 邵毅. 單片機系統低功耗設計在數據采集系統中的應用[J]. 海洋技術, 2005, 24(3): 36-40.
[8] 趙志宏, 李小珉, 陳冬. 基于 C8051F系列單片機的低功耗設計[J]. 單片機與嵌入式系統應用, 2006, 8:7-10.
[9] 陳洪明. 嵌入式系統的低功耗技術研究[J]. 實驗科學與技術, 2008, 6(1): 19-21.
[10] 王輝, 馬福昌. 檢索式數字水位數據采集系統的低功耗途徑探討[J]. 太原理工大學學報, 2008, 39(2):119-122.
Design of low-power consuming, autonomous ocean environment monitoring system
LIU Su-hua1, LI Si-ren2, XU Yong-ping2
(1. Qingdao Technological University, Qingdao 266520, China; 2.Institute of Oceanology, the Chinese Academy of Sciences, Qingdao 266071, China)
Nov.,12,2010
low-power consumption; energy conserving; C8051F340 microcontroller; ocean environment
The work durability of a battery powered marine environment monitoring system is limited by the battery volume. Research on low-power consuming, autonomous ocean environment monitoring system had been carried out. To save energy and make full use of the water energy, this profiler adopted the technique of two-float assemblies by incorporating a small, instrumented profiling buoy with a fixed-point mooring main submersible buoy. An energy-conserving transmission had been developed under the energy conservation principle. Based on the analysis of the factors affecting power consumption, low-power design of the microcontroller data acquisition and control system had been completed. These designs could satisfy the abundant energy need for the long-term inplace operation of the ocean environment monitoring system. The prominent advantage of the system is not limited by the battery capacity and can provide 55 meters ocean elements continuous profiles relying on a single sensor group.
P715.4
A
1000-3096(2012)07-0001-06
2010-11-12;
2012-03-21
國家海洋局公益性項目 (201005027-6); 中國科學院知識創新工程重要方向項目(KZCX2-YW-JS203)
劉素花(1970-), 女, 山東青州人, 博士, 主要從事檢測、自動控制等方面的教學與研究, 電話: 0532-82898737, E-mail: liusuhua2003@126.com
(本文編輯:劉珊珊)
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
