基于STC單片機的太陽能跟蹤控制器設計
2012-10-24 06:48:00楊家榮
上海電氣技術 2012年4期
楊家榮
(上海電氣集團股份有限公司 中央研究院,上海200070)
當前,人類面臨的能源危機問題越來越突出,使得人們將目光逐漸轉向了各種新型的清潔能源,而太陽能作為已知的最原始的能源,具有干凈、可再生、豐富而且分布范圍非常廣等特點。近年來,太陽能的應用范圍日益廣泛,諸如太陽能熱水器、太陽能發電、海水淡化、太陽能制氫等,都希望高效接收和利用太陽能。目前,太陽能發電主要分為兩種:① 光伏發電;②光熱發電(見圖1)。無論哪種形式的太陽能熱利用,都希望能有效提高太陽能的效率;因此,實施太陽光跟蹤是很有必要的。現有的幾種太陽能利用方式中,一般都需要配置一套具有雙軸旋轉機構的跟蹤裝置來跟蹤太陽。香港大學教授研究了太陽光照角度與太陽能接收率的關系,理論分析表明:對太陽光線運動的跟蹤與非跟蹤,太陽能設備能量的接收率相差37.7%,精確地跟蹤太陽可使太陽能設備的能量利用率大大提高[1]。
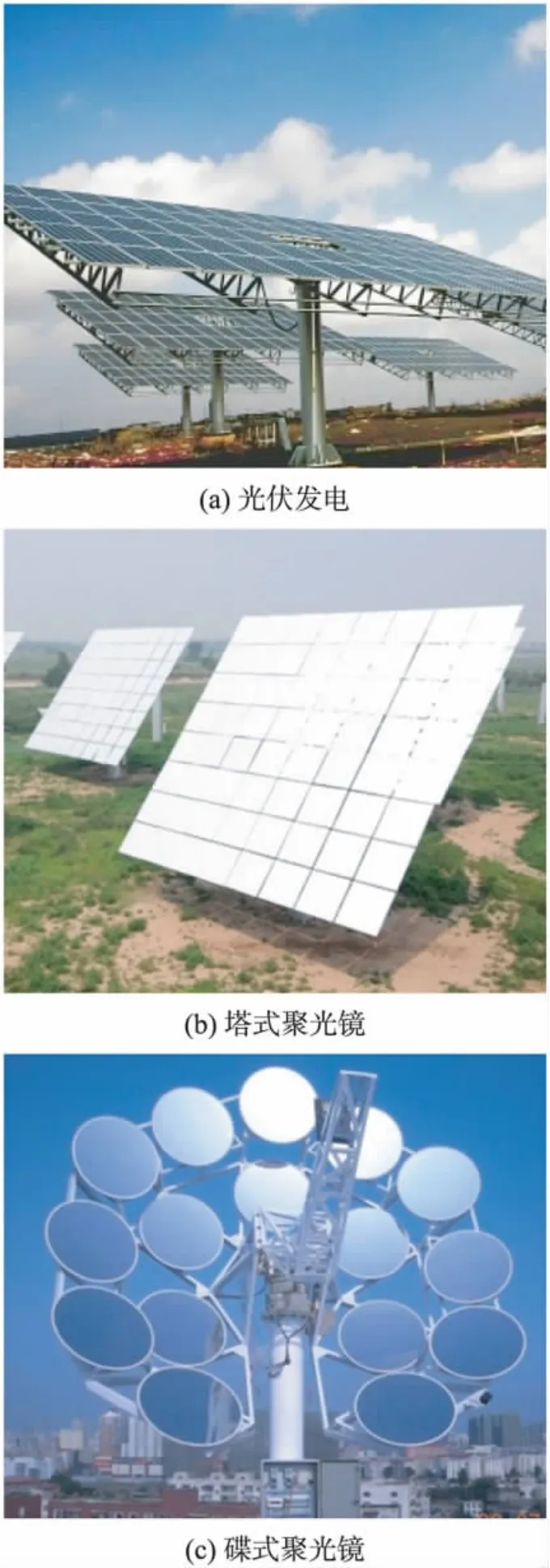
圖1 太陽能發電
本文通過利用國內市場通用型STC 89C52單片機作為控制核心,設計了一種基于單片機的雙軸太陽能跟蹤控制器,通過驅動步進電動機實現對太陽的精確跟蹤,具有結構簡單、運行可靠等優點,可大幅度降低跟蹤系統的成本,具有廣闊的應用前景。
1 系統模塊組成及架構
本文所設計的跟蹤系統主要由核心單片機控制模塊、液晶顯示模塊、時鐘模塊、步進電動機驅動模塊、光電反饋模塊、通訊模塊以及系統的外圍電路等組成,如圖2所示。其中單片機控制模塊主要用于太陽高度角及方位角的計算,并轉換為步進電動機控制信號;液晶顯示模塊主要是作為一個當前位置的顯示、時間顯示等;時鐘模塊主要用于產生計算太陽當前位置所需的時間數據,向系統提供精確的時鐘;步進電動機驅動模塊用來接受單片機的輸出脈沖,經光電隔離后放大循環輸出,驅動步進電動機運轉;光電反饋模塊通過光敏電阻來檢測環境光線強弱程度,接受來自不同角度的入射光,并經過AD采樣后發送給單片機,當對應的兩個光敏電阻接受到的光強差值大于一定范圍時,單片機控制電動機轉動,從而使采光面板在豎直方向上始終正對著太陽光;通訊模塊主要完成單片機與外部的信息交互以及數據傳輸。
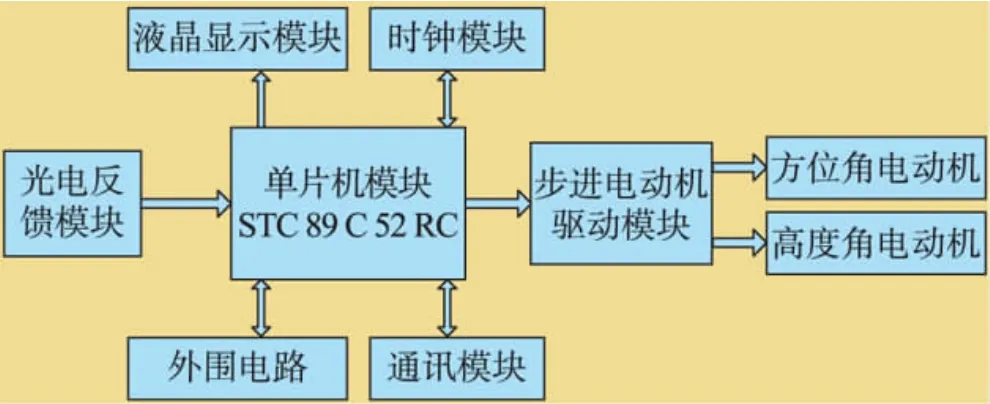
圖2 系統原理框圖
2 太陽能跟蹤控制器設計
2.1 硬件設計
STC 89C52是一種低功耗、高性能CMOS 8位微控制器,具有8KB的系統可編程Flash存儲器。在單芯片上,擁有靈巧的8位CPU和在系統可編程Flash,使得STC 89C52為眾多嵌入式控制應用系統提供高靈活、超有效的解決方案。
STC89C52單片機的18、19引腳XTAL1和XTAL2是單片機的外接時鐘引腳端,XTAL1為片內震蕩電路的輸入端,XTAL2為片內震蕩電路的輸出端。一般來說,可采取外接晶體諧振器(12MHz)以及2個電容構成并聯諧振電路,電容取值一般為10~30pF。在焊接刷電路板時,晶振和電容應盡可能與單片機芯片靠近,以減少寄生電容的影響,更好地保證系統的穩定運行,如圖3所示。
(1)復位電路。STC 89C52單片機和AVR單片機的復位電平不同,前者為高電平復位,后者為低電平復位。復位電路通常采用上電自動復位和按鈕復位兩種方式。在晶振工作時,RST腳持續2個機器周期高電平將使單片機復位。設計復位電路如圖4所示,電阻R1和電容C3組成簡單的上電自動復位電路,按鈕手動復位則通過手動按下S1(SW-PB)按鈕來實現。
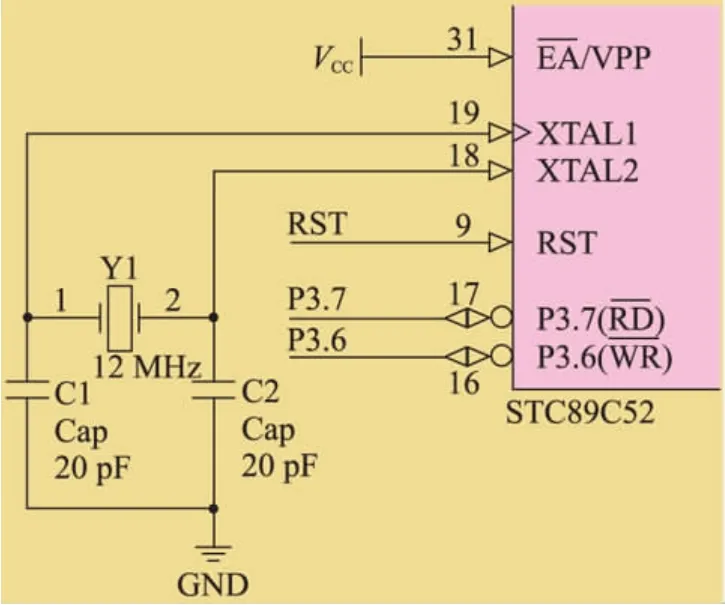
圖3 單片機時鐘振蕩電路
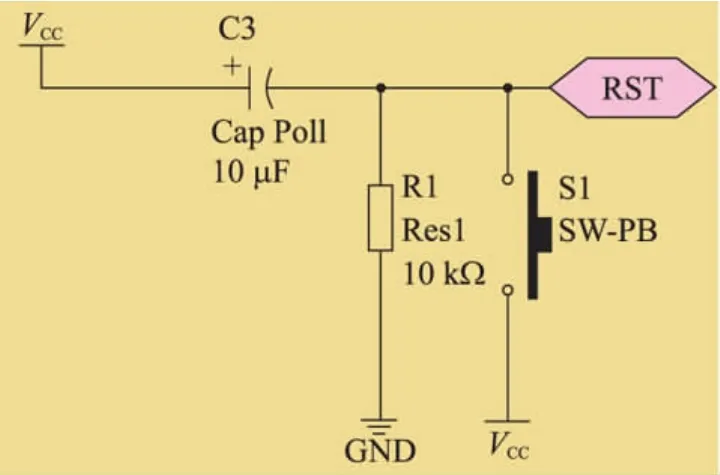
圖4 復位電路
(2)光電檢測電路。光電檢測模塊主要是利用光敏電阻接收光照時阻值發生變化的原理,一般需要4個,采用十字方式排列,分別放置在東、南、西、北平面的4個方位;若光敏電阻的阻值相等,說明此時太陽光線與平面相垂直,電動機無需運動。隨著太陽的移動,必然會有一個方向的光敏電阻接受的光照強,與之對應方向的光敏電阻接受的光照弱,相應的阻值就存在差異。此時,控制電路將光敏電阻的阻值變動轉換為控制信號,經單片機驅動電動機運轉,直至對應方向的2個光敏電阻上的光照強度再次相等,系統所設計的光電檢測電路如圖5(a)所示。其中檢測模擬量信號由AD采樣芯片ADC 0809采集后將數據傳遞給單片機,如圖5(b)所示。ADC 0809是一個逐次逼近型的A/D轉換器,由外部供給基準電壓,有8個模擬量的輸入端,帶有三態輸出鎖存器,轉換結束時,可由單片機控制打開三態門,讀出轉換結果。
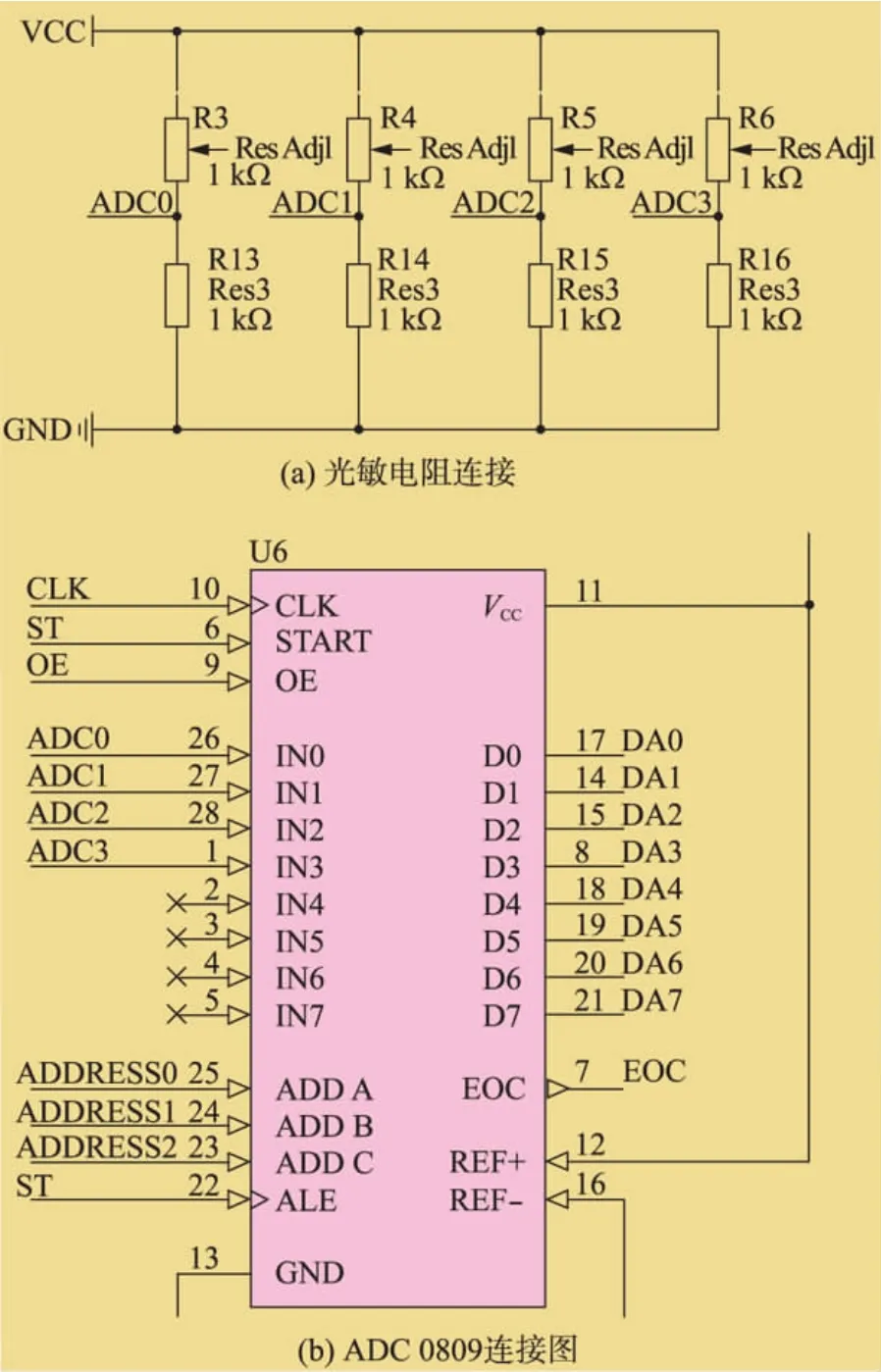
圖5 光電檢測電路
(3)步進電動機驅動電路。步進電動機是將電脈沖轉化為角位移或線位移的執行機構。其結構簡單,控制方便,可以通過控制單片機發送出來的脈沖個數來控制角位移量,從而達到精確定位。通俗地說,就是給電動機加一個脈沖信號,則電動機轉過一個固定的角度,即步距角。電動機的轉速及停止的位置只取決于脈沖信號的頻率和脈沖數。控制上,主要是需要實現電平的匹配;因此,需要設計功率驅動電路,如圖6所示。
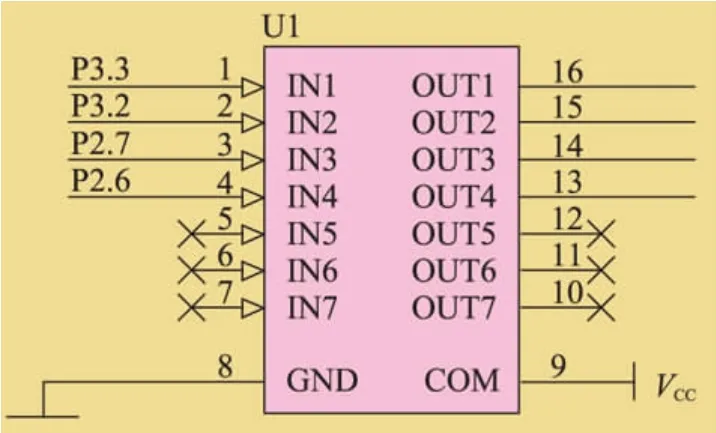
圖6 步進電動機驅動電路
(4)時鐘電路。由于系統的軟件開發中涉及太陽軌跡的計算,而這需要通過精確的時間來計算該時刻太陽所處的理論位置,因此需要使用時鐘電路。雖然單片機內部也可以采用定時/計數器的方式來進行時間的推算,但這種方式需要占用大量的系統時間和資源,且時間不夠精確,長時間運行存在累積誤差。目前,通用的做法是采用時鐘芯片,因此,本文采用了美國DALLAS公司推出的高性能、低功耗、帶RAM的實時時鐘電路芯片DS 1302。它可以對年、月、日、周、時、分、秒進行計時,具有閏年補償功能,工作電壓為2.5~5.5V。采用三線接口與CPU進行同步通信,并可采用突發方式一次傳送多個字節的時鐘信號或RAM數據[2]。該芯片采用雙電源(VCC1和VCC2)供電,由VCC1和VCC2兩者中較大者供電,當VCC2>VCC1+0.2 V時,VCC2給DS 1302供電。當VCC2<VCC1時,VCC1給DS 1302供電,使系統在沒有主電源的情況下也能保持時鐘的連續運行。系統設計的時鐘電路如圖7所示。
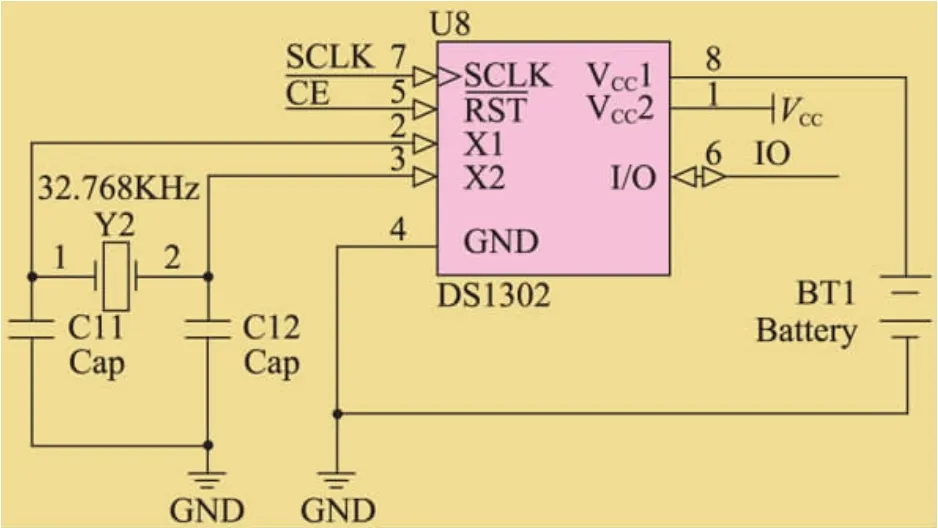
圖7 時鐘電路
2.2 軟件設計
目前,跟蹤太陽的方法可概括為2種[3]:視日運動軌跡法和光電跟蹤法。光電跟蹤的靈敏度較高,結構簡單,但容易受光強和天氣的影響,如天空中的云層飄過會讓系統產生誤判;而視日運動軌跡法是按照天文學法推算出的太陽運動軌跡運行,屬開環控制,這種方法的程序計算較復雜,且沒有考慮執行機構的誤差情況,無法消除累計誤差。因此,設計的跟蹤控制器結合了以上兩種方法,先由視日運動軌跡法進行粗跟蹤,再利用光電跟蹤法進行精確定位。
系統在上電運行時,首先進行系統初始化。然后,系統先判斷是否在工作時間段內,如每天的18∶00以后,已經日落,則系統自動進入待機狀態;而如果系統時間在6∶00~18∶00,則系統先進行回零,確認一個參考點之后,進行視日運動軌跡的計算,并運轉到計算結果位置處。最后,根據光電傳感器反饋的信號進行微調,如果光電傳感器反饋的偏差值過大,則認為此時可能有烏云遮擋等情況發生,可切換到視日運動軌跡狀態運轉,待給出下一個步進電動機運轉信號之前,重復上述判斷。系統的流程圖如圖8所示。
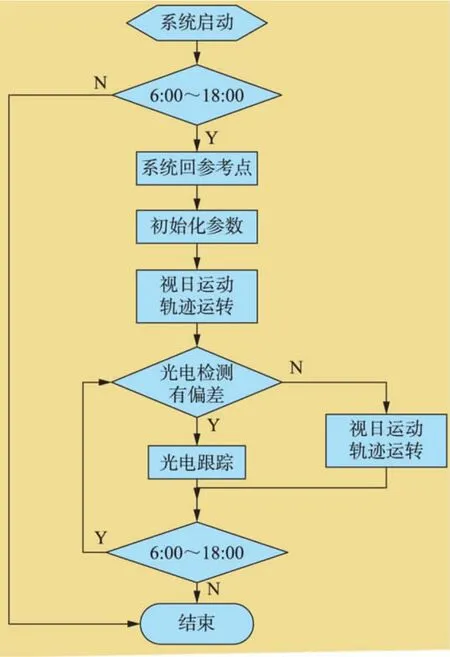
圖8 系統運行流程
雖然太陽的位置時刻都在變化,但其運行具有嚴格的規律性,視日運動軌跡計算主要是根據天體的運行規律計算出太陽運行規律,其流程如圖9所示,主要涉及太陽的高度角和方位角,并根據系統時鐘計算出步進電動機的轉角。通過分別建立太陽的運行軌跡的時角坐標系和地平坐標系,以及跟蹤控制系統的運動規律的坐標系,對這些坐標系的變換來建立太陽能跟蹤控制系統的運動方程[4]。在地平坐標系中,太陽的位置可用如下方程描述:

式中,α為太陽的高度角;γ為太陽的方位角,通常以正南方向為0°,向西為正,向東為負;δ為太陽赤緯角;ω為太陽時角;φ為安裝地點的維度角。根據Cooper方程,每天的太陽赤緯角為
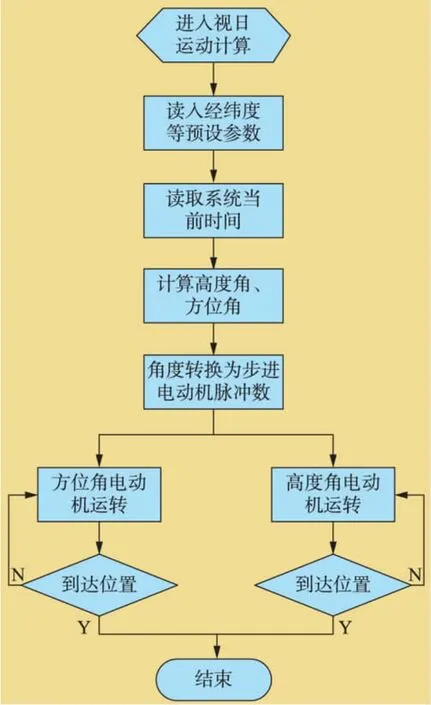
圖9 視日運動軌跡計算流程

式中,n為日期在年內的序號,稱作積日。
除此以外,系統的軟件設計還包括時鐘模塊、數碼管顯示模塊、光電傳感器數據采集模塊等,共同構成一個完整的系統,實現對系統的控制。
2.3 視日運動軌跡仿真
系統設計完成后,為校驗視日運動軌跡算法的正確性,利用Proteus進行了仿真。Proteus是英國Labcenter公司開發的嵌入式系統仿真與開發平臺,支持當前流行的單片機開發環境,該軟件功能強大,性能非常卓越,非常適合單片機系統的仿真和實驗。圖10為視日運動軌跡的仿真系統圖,系統主要由單片機(U1)、DS1302時鐘電路(U2)、步進電動機驅動芯片(U3、U4)步進電動機以及相應的外圍電路組成,C1~C4為電容,X1為單片機時鐘所需的晶振,X2為DS1302運行所需的晶振,RP1為排阻。由單片機根據與DS1302通訊取得的時鐘數據進行運算,計算出某時刻的太陽高度角和方位角,驅動步進電動機運轉,Proteus仿真系統中,可方便地顯示出當前步進電動機的轉角,如某日某時刻,經過仿真運行的太陽高度角和方位角如圖11所示。從結果看,仿真結果與實際運算結果一致,證明所設計的視日運動軌跡算法是正確的。
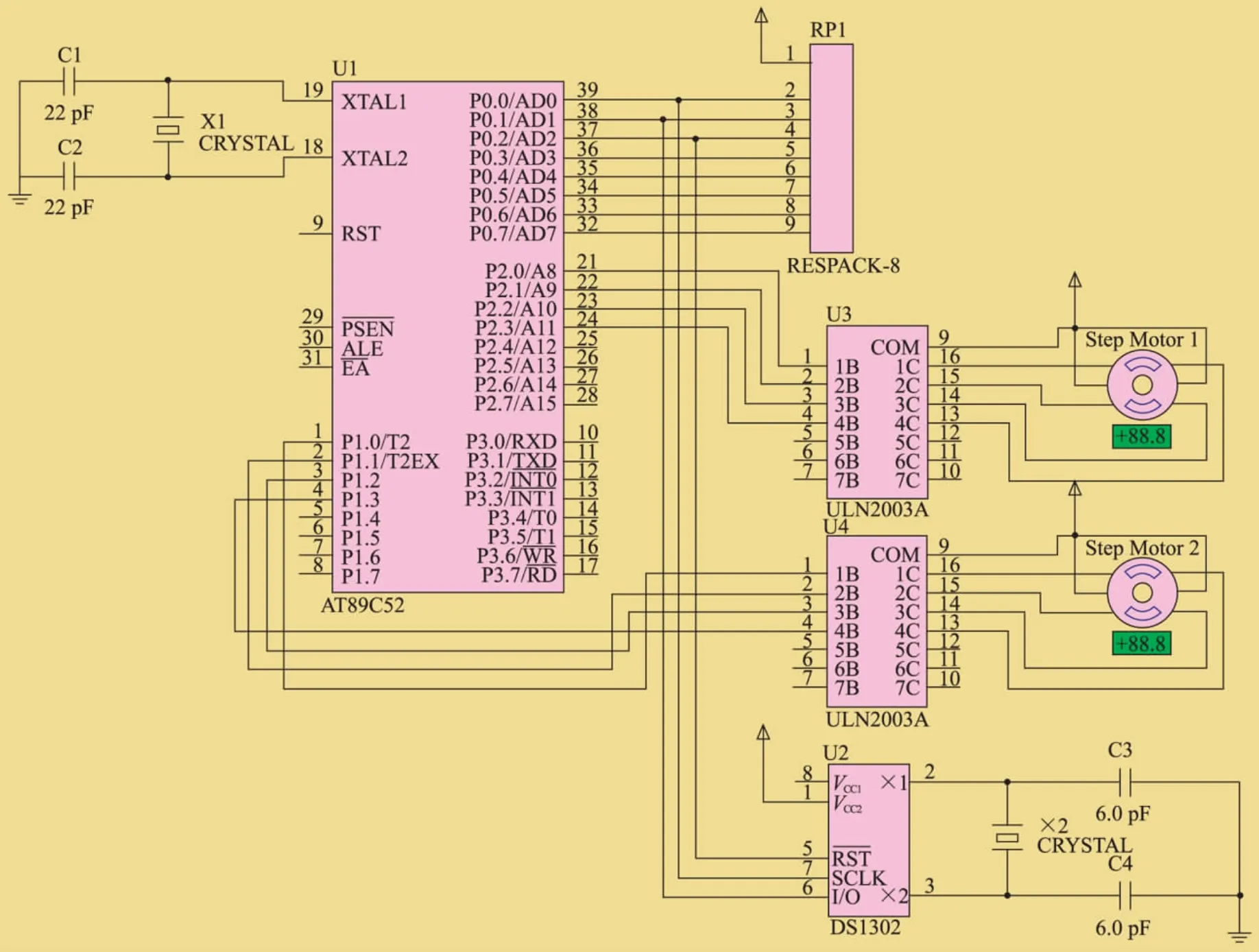
圖10 系統仿真圖
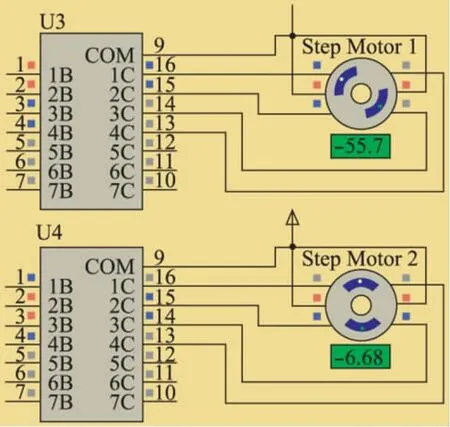
圖11 太陽高度角與方位角仿真結果
本文開發的基于STC89C52單片機的雙軸太陽跟蹤控制器實驗裝置如圖12所示。
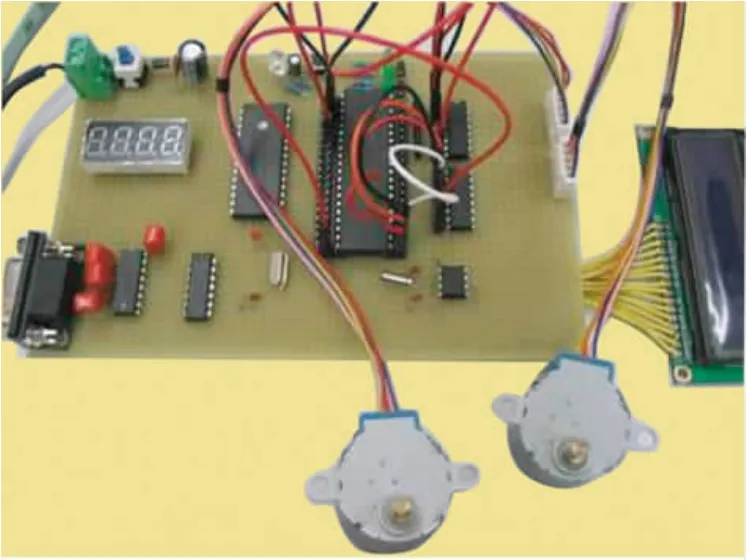
圖12 控制器實驗裝置硬件
3 結 語
本文設計了一種基于單片機的雙軸太陽能跟蹤控制器,經實驗驗證,步進電動機運轉結果與仿真結果一致,可順利實現雙軸太陽跟蹤。該控制器可根據太陽高度角及方位角不斷變化的特點,以視日運動軌跡跟蹤為主,結合光電跟蹤作為校正,驅動作為高度角和方位角兩個軸向轉動的電動機運轉,跟蹤更為精確。系統結構簡單,成本低廉,有效地提高了太陽能的利用率,可直接用于太陽能光伏裝置的跟蹤,對軟件稍作修改后,也可用于其他如太陽能碟式裝置追日跟蹤,具有較好的應用和推廣價值。
[1]尤金正.基于圖像傳感器的閉環式太陽跟蹤控制器的研究與實現[D].蘇州:蘇州大學,2010:4-5.
[2]韓旖旎.基于過采樣技術的動態汽車稱重儀的設計[D].太原:太原理工大學,2010:47-49.
[3]馬正華,孔 丹,徐守坤.基于步進電機的太陽自動跟蹤系統的研究[J].電氣傳動,2012,42(3):37-40.
[4]楊培環.高精度太陽跟蹤傳感器與控制器的研究[D].武漢:武漢理工大學,2010:8-10.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
電子制作(2019年13期)2020-01-14 03:15:28
裝備制造技術(2019年12期)2019-12-25 03:06:46
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
電子制作(2018年12期)2018-08-01 00:48:04
家庭影院技術(2017年9期)2017-09-26 03:41:45