船用智能化柴油機排氣閥硬件在環仿真試驗
2012-10-26 13:34:06楊建國舒暢王勤鵬
哈爾濱工程大學學報 2012年2期
關鍵詞:信號
楊建國,舒暢,王勤鵬
(1.武漢理工大學能源與動力工程學院,湖北武漢430063;2.武漢理工大學 船舶動力工程技術交通行業重點實驗室,湖北武漢430063)
為滿足日益嚴格的柴油機排放法規,提高船用柴油機經濟性和低排放性,智能化技術已成為大型船用低速二沖程柴油機的發展方向[1].與傳統船用柴油機相比,智能化柴油機取消了凸輪軸及其傳動機構,由電控單元(electrically control unit,ECU)發出指令,通過電控執行元件柔性控制燃油噴射壓力、燃油噴射時間、燃油噴射量及排氣閥啟閉時間,以保障柴油機在各種工況下性能優化.
電控排氣閥系統是大型船用低速二沖程智能化柴油機的重要組成部分.國外在電控排氣閥技術方面已進行了大量研究,并已實現產品的商業化,如W?rtsil?公司 RT-Flex系列柴油機以及 MAN B&W公司ME系列柴油機的電控排氣閥系統[2-3].目前國內大型船用柴油機電控排氣閥系統的研究尚處于研究初級階段,只有部分高校和研究所開展了中、小型柴油機電控配氣機構特性的基礎研究[4-8].本文在分析柴油機電控排氣閥系統的基礎上,利用研制的W?rtsil?RT-Flex 60C型船用低速二沖程智能化柴油機硬件在環(hardware-in-loop,HIL)仿真平臺,對電控排氣閥系統特性進行試驗研究,為深入研究船用智能化柴油機排氣閥的柔性控制特性提供了試驗驗證依據.
1 RT-Flex 60C柴油機排氣閥系統
W?rtsil?RT-Flex 60C型柴油機主要技術參數如表1所示,排氣閥系統結構如圖1所示.圖1只描述柴油機單缸裝配的排氣閥及相關閥件,排氣閥軌閥⑧為雙穩態兩位三通閥電磁閥,排氣閥控制閥⑦為液動兩位三通方向控制閥.
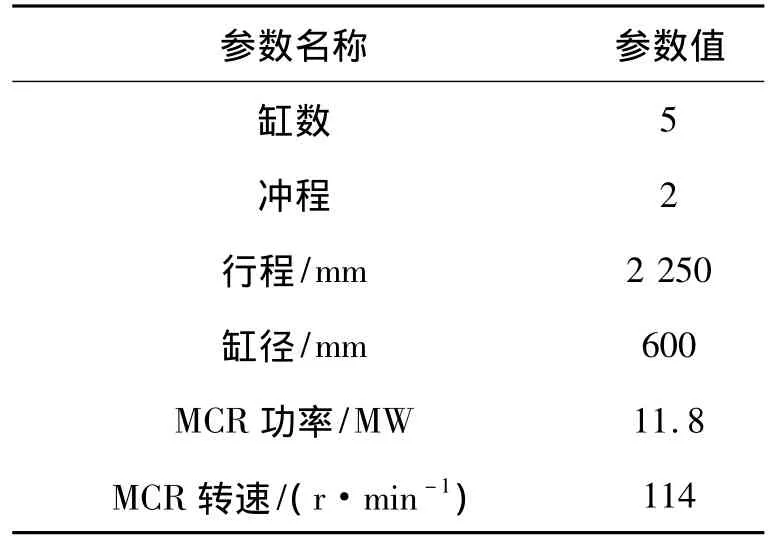
表1 Wartsilart RT-Flex 60C柴油機的主要技術參數Table 1 Main technical parameters for Wartsilart RT-Flex 60C engine

圖1 RT-Flex 60C柴油機排氣閥系統結構Fig.1 Exhaust control system diagram of RT-Flex 60C
智能化柴油機對排氣閥的柔性控制主要是對其伺服油軌壓和排氣閥正時的控制.ECU③根據柴油機工況實時調節伺服油泵開度,通過控制伺服油流量控制軌壓.ECU③通過曲軸角標判斷各缸的運行狀態,輸出“排氣閥開啟”脈沖信號至軌閥⑧,高壓伺服油經控制閥⑦進入驅動隔離裝置⑥,推動活塞下行,活塞另一側伺服油驅動閥桿下行打開排氣閥;ECU③輸出"排氣閥關閉"脈沖信號至軌閥⑧,驅動隔離裝置⑥中的高壓伺服油經低壓管路釋放,空氣彈簧將閥桿向上推行關閉排氣閥.
2 HIL仿真平臺設計與試驗方法
HIL仿真平臺以船用RT-Flex 60C型智能化柴油機為原型,不發生真實的燃燒、做功和掃氣,只表示船用柴油機的智能控制功能.
2.1 HIL仿真試驗臺架組成
HIL仿真平臺主要結構如圖2所示,其中采用大功率交流電機為高壓伺服油泵提供動力;用變頻電機帶動絕對式角度編碼器為ECU提供曲軸轉角信號.電機轉速的設定由控制器輸出.操作臺和控制器之間采用CAN總線連接.通過CAN總線,操作臺為運行在控制器中的仿真模型設置參數,控制器發送監測信息到操作臺顯示并保存.
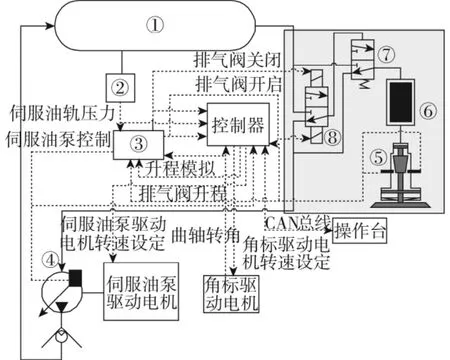
注:①-伺服油高壓油軌,②-壓力變送器,③-ECU,④-伺服油泵,⑤-排氣閥,⑥-排氣閥驅動隔離,⑦-排氣閥控制閥,⑧-排氣閥軌閥.
2.2 控制器設計
在NI公司的cRIO控制器上運行仿真模型,由控制臺輸入驅動電機轉速設定值,通過CAN總線傳送至控制器.控制器設定伺服油泵驅動電機轉速,為伺服油泵提供動力;設定角標電機轉速,驅動角標編碼器為ECU提供曲柄轉角信號,角標光電編碼器為12位分辨率,最大轉速采集信號相位誤差小于0.5°;控制器采集單個實體排氣閥升程信號和排氣閥開啟、關閉控制信號,假設全部氣缸以相同方式工作,忽略柴油機各缸工作的不均勻性,其他各缸的狀態不直接計算而是根據發火順序由實體排氣閥的狀態遞推得出,即采用“缸平移”法為ECU提供4個仿真的排氣閥升程模擬信號,以保證ECU的正常工作[9],程序框圖如圖 3所示.
控制器硬件采用cRIO9102實時控制器、8槽cRIO 9104機箱及各種R系列采集模塊,配置如圖4所示.用cRIO 9205和cRIO 9221模塊作A/D轉換,采集ECU接收和發出的信號,如排氣閥升程、排氣閥控制和PWM伺服油泵控制、伺服油軌壓力等信號,采樣頻率為20 k/s;用cRIO 9411數字信號模塊采集曲軸角標信號;用cRIO 9265模塊作為D/A轉換,輸出電流控制伺服油驅動電機和向ECU輸出虛擬缸排氣閥升程信號;用cRIO 9853模塊作為CAN總線通訊.
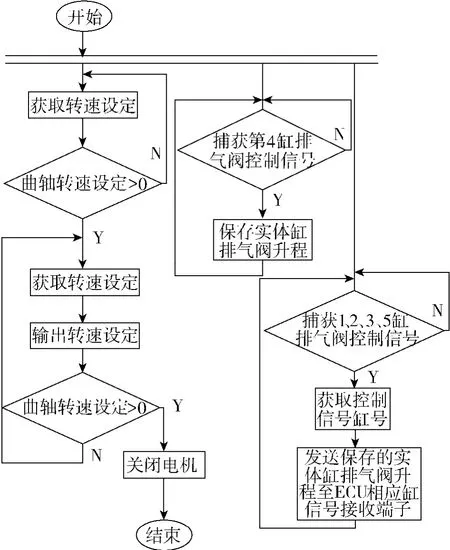
圖3 控制器程序框圖Fig.3 Program block diagram of the controller
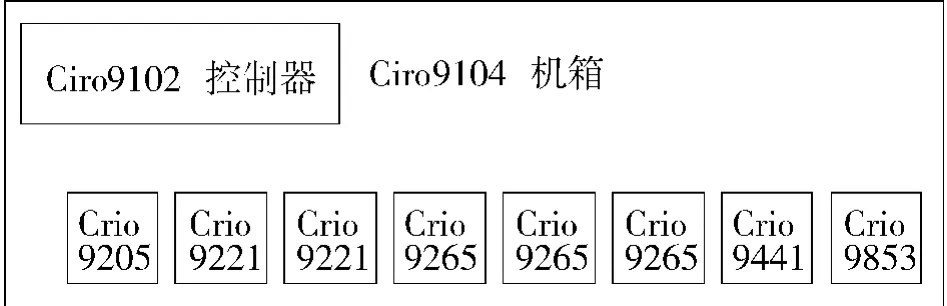
圖4 控制器IO模塊配置Fig.4 IO Configuration diagram of the controller
2.3 試驗方法和驗證
柴油機推進特性的工況如表2所示,通過測量PWM(pulse width modulation)伺服油泵控制、軌壓和排氣閥升程等信號,分析排氣閥及其驅動部件的特性以及ECU的控制策略.
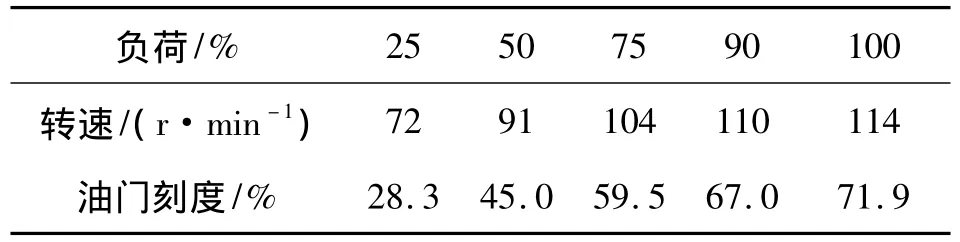
表2 柴油機推進特性的工況Table 2 Loads of diesel propulsion characteristics
HIL仿真平臺在25%負荷運行測量的排氣閥升程、排氣閥開啟與關閉控制、伺服油軌壓和PWM控制等信號如圖5所示.排氣閥開啟后軌壓下降,ECU通過改變PWM占空比控制伺服油泵開度,調整軌壓達到設定值.排氣閥啟閉時間只占氣閥開啟持續期的一部分,排氣閥升程隨曲軸轉角的變化呈梯形,使氣閥保持最大升程時間占整個開啟時間的大部分,保證充氣效率,以提高柴油機的動力性、經濟性以及排放的改善.
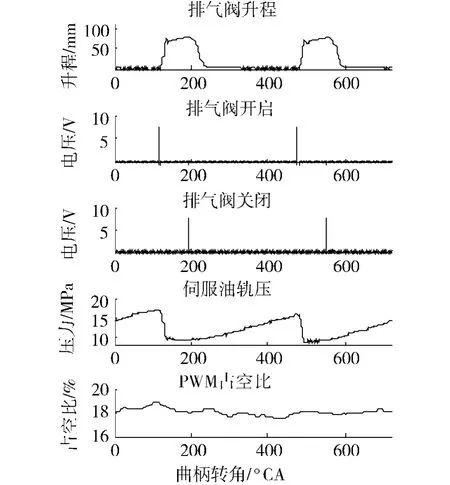
圖5 測量的排氣閥信號波形(25%負荷)Fig.5 Waves of exhaust lifts and control signals measured(25%load)
HIL仿真試驗臺架在25%、50%和75%負荷運行測量的排氣閥升程和控制信號如圖6所示,隨著負荷增加,排氣閥開啟持續角度增加.由于HIL系統與真實機器存在的差異,HIL系統中電控排氣閥在75%以上工況時工作不正常,即采用在控制器發出排氣閥升程模擬信號以代替實體缸位移傳感器信號,以滿足ECU在90%工況和100%工況下運行.
圖7是測量的排氣閥升程信號,根據波形定義如下特征參數:c1是ECU發出排氣閥開啟信號到排氣閥開始移動的延遲角度,°CA;c2是排氣閥從開始移動到完全開啟的角度,°CA;c3是ECU發出排氣閥關閉信號到排氣閥開始移動的延遲角度,°CA;c4是排氣閥從開始移動到完全關閉的時間角度,°CA.根據上述特征參數,在HIL仿真系統中模擬排氣閥從開啟到關閉過程中排氣閥升程信號的簡化波形,如圖8所示.

圖6 不同工況排氣閥開啟持續角的比較Fig.6 Comparison of different conditions of exhaust lifts and control signals
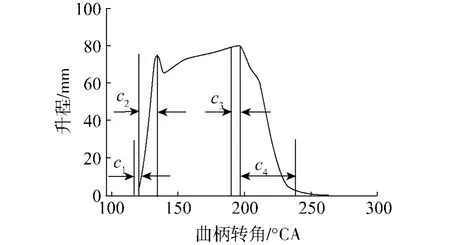
圖7 測量的排氣閥升程信號Fig.7 Signals of measured exhaust exhaust lifts
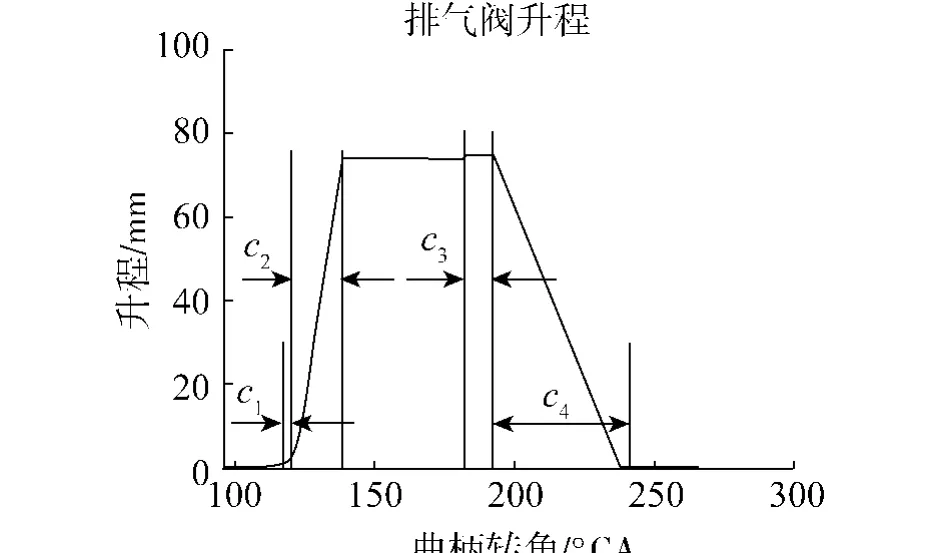
圖8 模擬的排氣閥升程信號Fig.8 Signals of simulated exhaust exhaust lifts
根據相關資料,ECU對排氣閥開啟、關閉相位進行閉環控制,以排氣閥開啟行程的15%(關閉行程的85%)作為判斷排氣閥啟閉的閾值.對相同工況下實體缸排氣閥升程信號和排氣閥升程模擬信號進行歸一化處理,為了保證測量的實體缸排氣閥升程信號與模擬排氣閥升程信號基本一致,ECU對排氣閥開啟與關閉的控制信號進行了調整,圖9是實體排氣閥升程和模擬排氣閥升程信號比較,實體缸排氣閥升程信號和排氣閥升程模擬信號15%開啟行程相位重合于124°CA,85%關閉行程相位重合于230°CA.
圖10是不同工況下采用排氣閥升程模擬信號運行所測量得到的信號.結合實體缸試驗結果和試車報告,得到如表3所示的數據,在25%、50%和75%工況下測量排氣閥升程模擬信號得到的開啟關閉的閾值和測量實體缸排氣閥升程得到的開啟關閉閾值吻合,且與試車報告的數據基本吻合,90%工況和100%工況下測量排氣閥升程模擬信號得到的開啟關閉的閾值和試車報告基本吻合.綜上所述,測量數據和試驗結果都可靠.可以在HIL仿真平臺上進行排氣閥特性和控制策略研究.
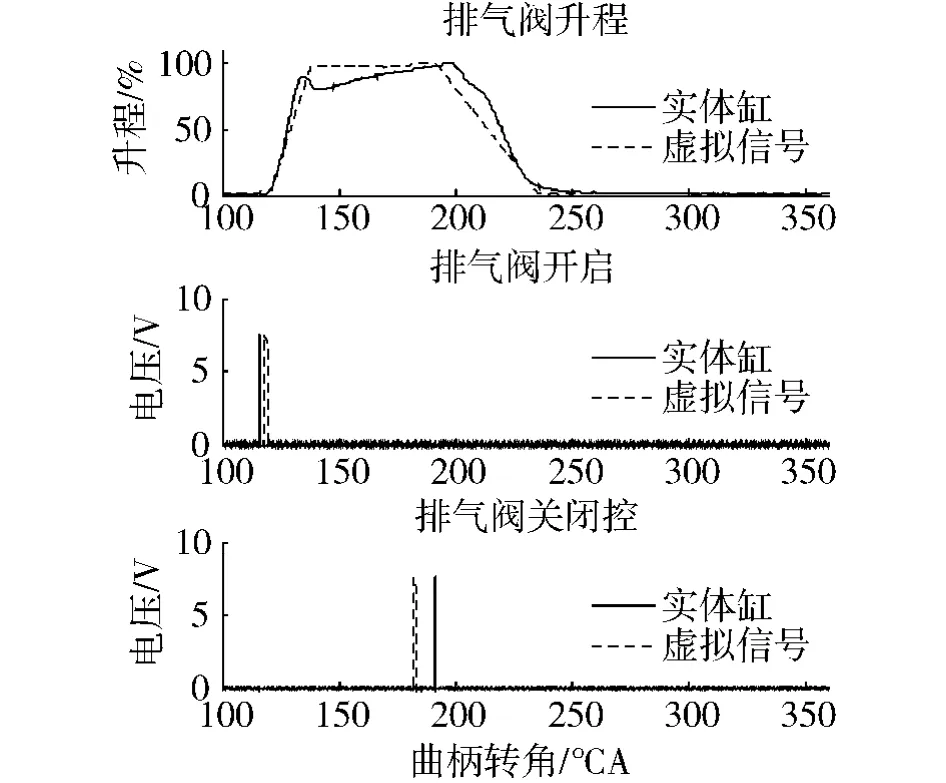
圖9 實體排氣閥和模擬排氣閥升程信號比較Fig.9 Comparison of waves of measured exhaust lifts and simulated exhaust lifts

圖10 不同工況下排氣閥升程模擬信號Fig.10 Comparison of different conditions of measured exhaust lifts and control signals
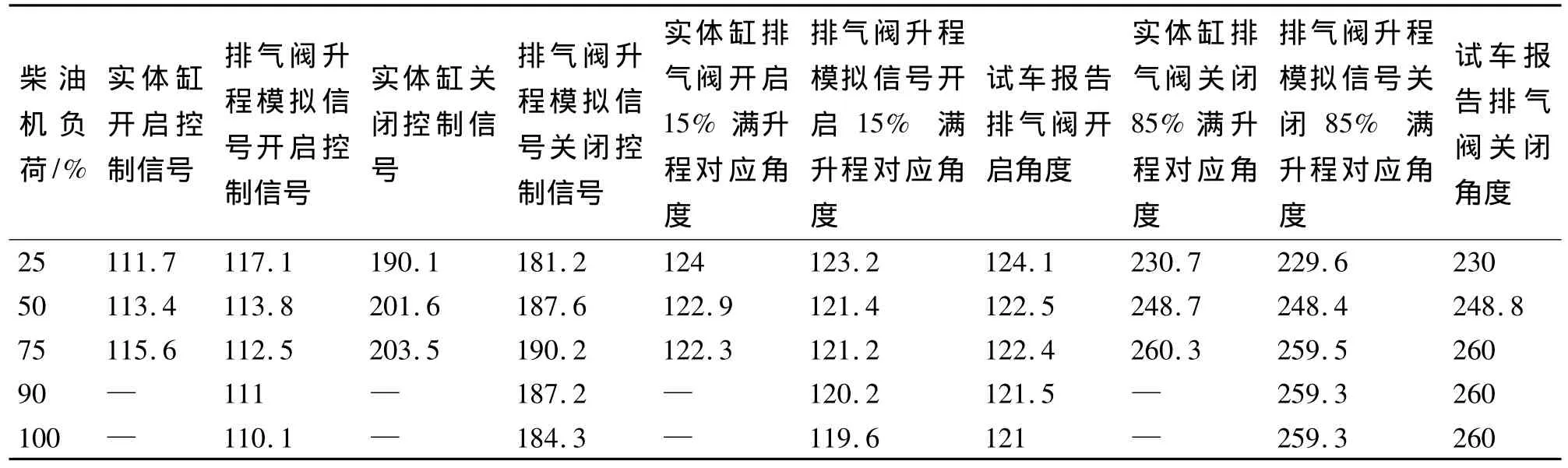
表3 不同工況下軌壓、排氣閥開啟和關閉角的比較Table 3 Comparison of rail press,exhaust opening angles and closing angles under different loads
3 HIL仿真系統試驗研究
3.1 排氣閥系統特性研究
根據試驗數據計算排氣閥開啟15% 滿升程對應角度與排氣閥關閉85% 滿升程對應角度差,可得到為不同工況下排氣閥開啟持續角度如圖11.隨著柴油機負荷提高,排氣閥開啟持續角增加.
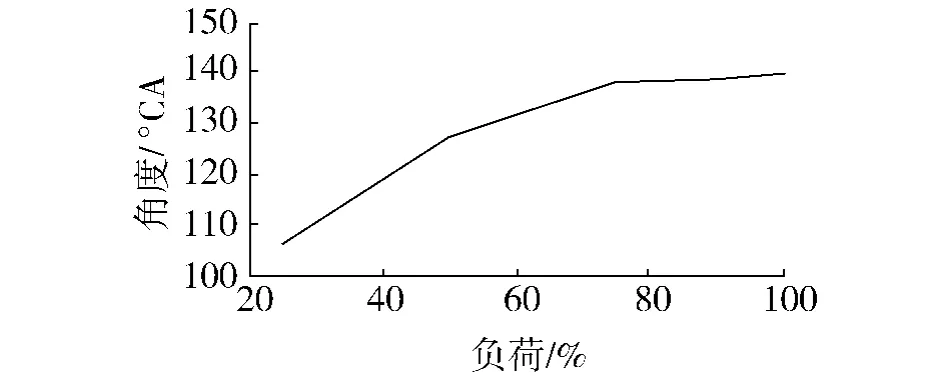
圖11 不同工況下排氣閥開啟持續角度Fig.11 Angles of different conditions between exhaust opening and exhaust closing
圖12是各工況下伺服油軌壓力和控制伺服油泵開度的PWM波占空比,隨著柴油機負荷提高,ECU提高PWM波占空比增加伺服油泵開度,使得伺服油軌壓升高.
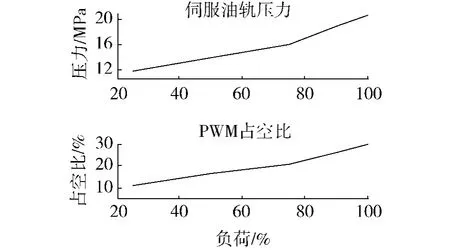
圖12 柴油機各工況下軌壓和PWM信號Fig.12 Rail press and PWM signals of diesel
圖13是不同工況下排氣閥開延遲時間和角度比較,排氣閥在開啟后,閥桿撞擊碟形彈簧產生反彈.從ECU發出排氣閥開啟控制信號到排氣閥運動到達反彈處有延遲.隨著柴油機負荷的增加,軌壓上升,排氣閥開啟延遲時間減少(圖13(a)),但柴油機的轉速隨著負荷的增加而增加,將排氣閥開啟延遲時間轉化開啟延遲角反而增加(圖13(b)).
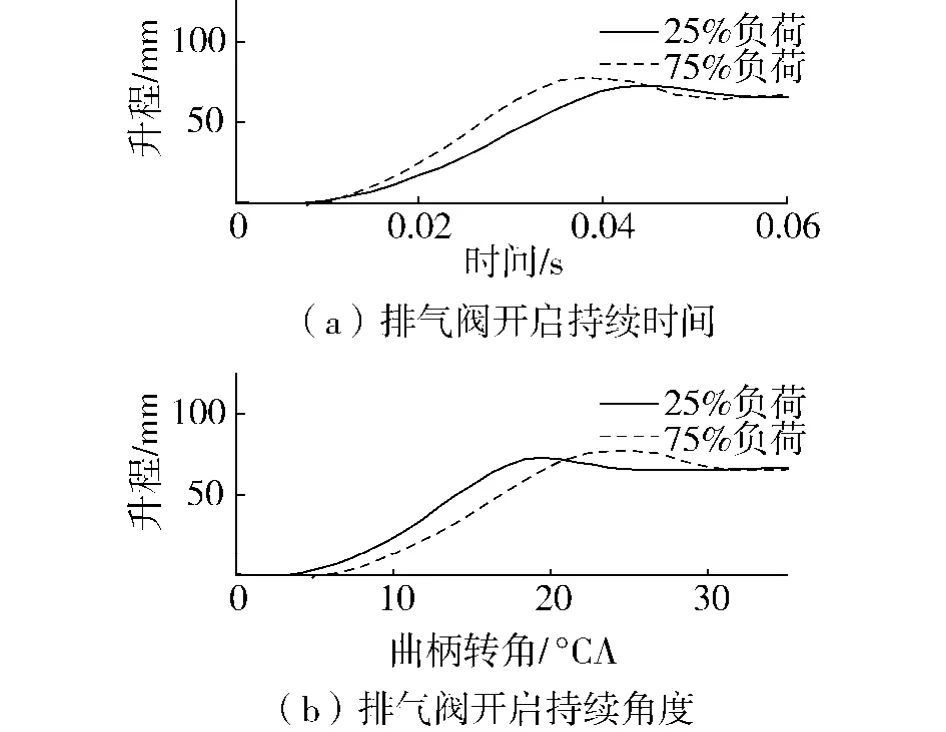
圖13 不同工況排氣閥開啟延遲時間和角度比較Fig.13 Comparison of delay angles and delay tim e of exhaust opening between different loads
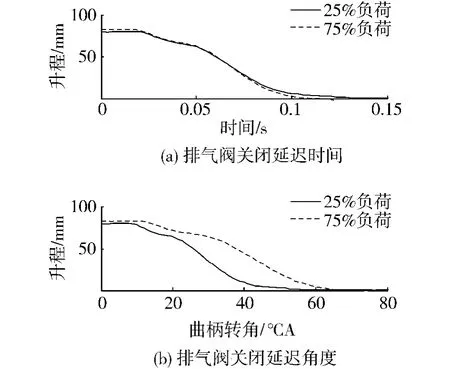
圖14 不同工況排氣閥關閉延遲時間和角度比較Fig.14 Comparison of delay angles and delay time of exhaust closing between different loads
圖14是不同工況排氣閥關閉延遲時間和角度比較,從ECU發出排氣閥關閉控制信號到排氣閥完全關閉有延遲,當排氣閥關閉時,空氣彈簧將排氣閥推行直至關閉,排氣閥的關閉延遲時間相差不大(圖14(a)),但柴油機的轉速隨著負荷的增加而增加,將排氣閥關閉延遲時間轉化成排氣閥關閉延遲角也增加(圖14(b)).因此,柴油機排氣閥開啟與關閉不僅與系統的特性相關,且與柴油機的工況密切相關.
3.2 控制策略研究
ECU根據工況確定排氣閥開啟、關閉角度的設定值,依靠測量得到的排氣閥升程曲線來計算排氣閥開啟、關閉角度的測量值,根據設定值和測量值之間的差值來調整控制信號的相位,對排氣閥開啟、關閉正時進行閉環控制,確保排氣閥在指定角度啟閉.
排氣閥的控制策略具有如下特征:1)伺服油軌壓隨柴油機負荷增加呈上升趨勢;2)排氣閥開啟控制信號對應角度隨負荷增加而減小;3)排氣閥關閉控制信號對應角度從25%負荷增加到75%負荷呈增大趨勢,然后呈下降趨勢;4)排氣閥開啟、關閉控制信號角度差從25%負荷增加到75%負荷呈增加趨勢,然后呈下降趨勢;5)排氣閥開啟15%滿升程對應角度隨負荷增加而下降;6)排 氣閥關閉85%滿升程對應角度從25%負荷增加到75%負荷呈增加趨勢,隨柴油機負荷的繼續增大,其轉速增加引起排氣閥關閉延遲角增大,ECU以減少關閉控制信號角度來修正排氣閥關閉85%滿升程所對應角度;7)排氣閥開啟15% 滿升程對應角度與排氣閥關閉85%滿升程對應角度差隨負荷增加總體呈增加趨勢.
4 結論
1)研制的智能化柴油機HIL仿真平臺可以準確獲取電控排氣閥系統的各種參數和控制信號,為研究電控排氣閥的特性和控制策略提供了試驗試驗條件;
2)排氣閥的HIL仿真試驗分析了大型低速智能化柴油機電控排氣閥系統的工作特性和控制策略,排氣閥隨柴油機的工況變化其開啟和關閉角度、開啟和關閉延遲角均不相同;
3)電控排氣閥系統采用了閉環控制方式,考慮了系統延遲及柴油機性能優化等因素,ECU采用了不同的控制策略實現了電控排氣閥的正時柔性控制,確保排氣閥正時的穩定性和柴油機總體性能的優化.
[1]張堅,李善從.船用低速大功率智能型柴油機的發展[J].船舶物資與市場,2007,29(2):21-24.ZHANG Jian,LI Shancong.Development of low speed high power intelligent marine diesel engine[J].Marine Equipment/Materials & Marketing,2007,29(2):21-24.
[2]W?rtsil? Corporation.Marketsuccess for Sulzer common-rail engines[EB/OL].[2011-02-05].http://www.wartsila.com/en/press-releases/newsrelease653.
[3]MAN Diesel& Turbo.ME Engines-the new generation of diesel engines[EB/OL].[2011-02-05].http://www.mandiesel.com/files/news/filesof2810/p412-0503.pdf.
[4]黃榮緯,趙雨東.發動機電磁氣門驅動的LQR法軟著陸控制[J].清華大學學報,2007,47(8):1338-1342.HUANG Rongwei,ZHAO Yudong.Soft landing control of electromagnetic valve actuation for engines by using LQR[J].Journal of Tsinghua University,2007,47(8):1338-1342.
[5]王希珍,李莉,嚴兆大等.基于仿真基礎上的電磁控制全可變氣門系統優越性的分析[J].內燃機工程,2004,25(1):31-34.WANG Xizhen,LILi,YAN Zhaoda,etal.Analysis of the advantages of electromagnetic control fully variable valve actuation system on the basis of simulation[J].Chinese Internal Combustion Engine Engineering,2004,25(1):31-34.
[6]張紀鵬,姜慧,張洪信,等.發動機排氣門電液驅動可變配氣相位機構的設計[J].內燃機工程,2008,30(2):34-47.ZHANG Jipeng,JIANG Hui,ZHANG Hongxin,et al.Development of electro-hydraulic drived variable valve timing system of exhaust valve[J].Chinese Internal Combustion Engine Engineering,2008,30(2):34-47.
[7]李莉,王希珍,嚴兆大,等.電磁驅動氣門機構系統模型[J].內燃機工程,2004,25(8):11-14.LILi,WANG Xizhen,YAN Zhaoda,et al.Modeling of solenoid-actuated valve system[J].Chinese Internal Combustion Engine Engineering,2004,25(8):11-14.
[8]陳勤學.中壓共軌電控柴油機可變氣門系統的研究[D].武漢:武漢理工大學,2002:55-56.CHEN Qinxue.Research onmedium pressure common rail,hydraulically actuating,electronically controlled,variable valve system for diesel engine[D].Wuhan:Wuhan University of Technology,2002:55-56.
[9]姜丹娜,張付軍,趙長祿.用“缸平移”法提高柴油機模型實時性的方法研究[J].內燃機工程,2006,27(2):31-34.JIANG Danna,ZHANG Fujun,ZHAO Changlu.Research on improving the real-time performance of the diesel engine model using the method of cylinder moving[J].Chinese Internal Combustion Engine Engineering,2006,27(2):31-34.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06