一種粗糙壁面爬行機器人的設計與實現
2012-10-26 13:34:14陳東良張群王立權左勇勝
哈爾濱工程大學學報 2012年2期
關鍵詞:分析
陳東良,張群,王立權,左勇勝
(1.哈爾濱工程大學 機電工程學院,黑龍江哈爾濱150001;2.海洋石油工程股份有限公司,天津300452)
近年來,小型足式機器人的研究取得了相當大的進展,尤其是其在粗糙地帶行走兼具快速性和穩定性的特點更具里程碑式的意義.但是,垂直壁面的攀爬對于機器人來說仍是一大挑戰,針對這方面的研究,國內外均處于初步研究階段.
傳統的爬壁機器人主要采用負壓吸附、永磁吸附和特殊黏合材料等方式,附著在光滑的豎直面上,如窗戶和光滑內墻.大部分攀爬方式均不適宜在有氣孔和灰塵較大的外墻面(如磚墻、粉飾灰泥墻、石墻)行走.負壓式攀爬方式雖然可以在這種壁面行走,但這種結構無論在移動和靜止的時候均需要提供相當大的電力支持,耗能較大.此外,不可避免地產生噪音,并很難適應(如窗戶邊緣和拐角處)非平坦地形.另外,還有一類特殊機器人采用手、足抓附的仿人類攀爬的方式.
通過研究發現,大自然中很多生物都能在垂直壁面上敏捷攀爬,它們都具備獨有的攀爬方式.大部分動物如貓、浣熊等采用它們堅硬而鋒利的爪子刺入木頭和樹皮[1];樹蛙和許多昆蟲使用粘性肉墊[2],這些肉墊能變形、復制它們所接觸的表面輪廓,表皮細胞產生分泌液,通過墊子表皮上的孔道傳送到墊子表面吸附物體[3];壁虎和一些蜘蛛使用大量的足部剛毛能粘附各種墻面[4-5].節肢類和爬行類昆蟲使用極細的足尖剛毛抓住物體的粗糙表皮.動物的種種攀爬方式均值研究人員深入研究探索,研制仿生爬壁機器人.研究發現,帶粘性的足尖剛毛對粗糙、多塵的外表面的行走環境尤為適應.
Eisner和Aneshansley研究了一種甲蟲吸附機制,甲蟲靠激活跗骨粘性機制來安全地停在表面并應對外界擾動.將甲蟲跗節通過鉤子連到樹葉上,測量顯示這些甲蟲能經受住4~5 g的拉力,相當于自身重量的幾百倍.跗節上面共約有60 000根粘性剛毛,每根剛毛末端有2個墊子.當行走時,甲蟲靠剛毛與表面接觸而產生一定摩擦力.
根據這一研究,專門針對粗糙壁面,研制一種能在3維空間自由運動的機器人.該機器人主體采用平行四邊形機構,足部采用多足趾結構,足尖附以鋒利爪鉤結構,可實現機器人在粗糙壁面自由行走.
1 機器人主體結構設計
通過對節肢類和爬行類昆蟲攀爬方式進行研究,設計爪鉤結構爬壁機器人,該機器人采用6足正向對稱式布局,主體結構采用典型平行四邊形結構,每條腿各3個自由度(2個主驅動自由度,1個被動約束自由度),行進中,主驅動電機負責主體爬行,1~6號電機負責足的起落,從而實現機器人在壁面上行走.平行四邊形機構可以增加行進過程中的穩定性,此外,采用單驅動源驅動主體爬行結構減少了驅動源的數量,更易于實現穩定控制.
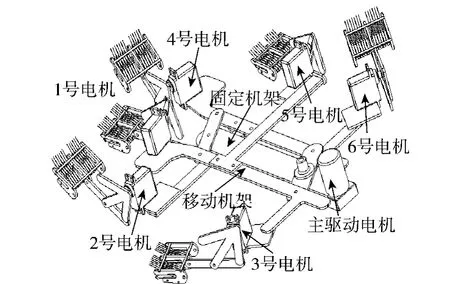
圖1 爬壁機器人三維模型Fig.1 3-D model of the wall-climbing robot
該爬壁機器人采用“六足綱”昆蟲(螞蟻,蟑螂等)所常用的行走步態——交替三角步態,即在攀爬過程中把6條足分為2組(以身體一側的前足、后足與另一側的中足作為一組),形成一個穩定三角架支撐體,處于支撐三角形上的3條腿的動作完全一樣,均處于擺動相或均處于支撐相.2組足如此交替地擺動和攀爬,從而實現機器人的快速運動.
為驗證步態的有效性并優化物理樣機結構設計方案,對整體機構在ADAMS環境中進行了步態仿真.圖2所示為爬壁機器人重心在前進方向上的位移,16 s內,機器人前進了3次,行走33.5 mm,行進速度為2.09 mm/s.該仿真結果初步驗證了步態設計的可行性.
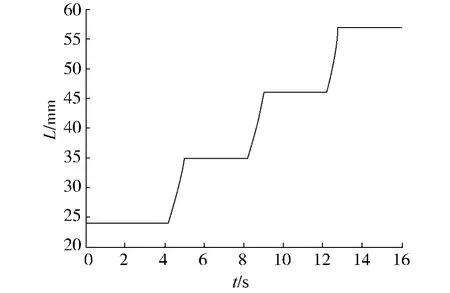
圖2 機器人質心在行進方向的位移Fig.2 The displacement of the robot in the direction of forward motion
2 足尖結構設計及分析
經對昆蟲攀爬方式進行研究分析,機器人足部采用獨特的結構設計,足部采用具有局部自由度結構設計,單足具有多只足趾,每只足趾具有俯仰及伸縮自由度,能隨墻壁的粗糙程度自行調整起伏,保證每只足趾均能提供勾附力.其中,足尖采用材料為60Si2Mn、直徑φ0.2 mm的彈簧鋼鉤,足趾背部附以φ0.2 mm 的彈性鋼針[6],提供垂直壁面壓力.
對足尖勾附粗糙壁面角度進行分析[7],假定一粗糙平面,對足尖滑過表面的過程進行剖面分析.

圖3 足尖勾附粗糙壁面模型局部視圖Fig.3 Diagram of the spine/surface interaction model
如圖3所示,通過得到的斷面圖,從右(最終勾附點)向左對滑過的軌跡進行分析,給定角度θ,其中θ大于最小可用角θmin.當足尖以角θ接觸粗糙墻壁時,足尖會沿墻壁下滑,直至足尖能勾附到可用凹槽(足尖可牢固勾附其上而不下滑的凹槽)停止,此時足尖引線與水平面所成的角度為θa,此時即為勾附狀態,可提供力進行攀爬.足尖的勾附力與足尖的切入角θ、最小可用角度θmin、以及摩擦系數μ有關:

由此可見,壁面凹凸不平時,θmin一部分決定于足尖切入角和壁面的摩擦系數μ,另一部分決定于壁面材質的強度.把介于最小可用角θmin和θa之間的角度區間稱為足尖勾附角度可用區,這一角度對攀爬時腿部角度控制具有重要意義.
3 腿部運動學分析
將該爬壁機器人視為多剛體系統,它滿足牛頓-歐拉方程:

式中:i=1,2,…,n,F、M 是力和力矩,C 是質心位置,R代表關聯矩陣,上標g、a、n分別表示外力作用、鉸鏈處相互作用和鉸鏈處的理想作用.
以機器人右前腿為例,進行運動學分析,右腿有3個轉動副關節,腿部為開環機構.將基坐標系{A}固定在電機servo的轉軸處,XAOYA平面與機身平行,YA為機器人前進方向,ZA軸方向與機身方向垂直.根據D-H方法建立坐標系如圖4所示.
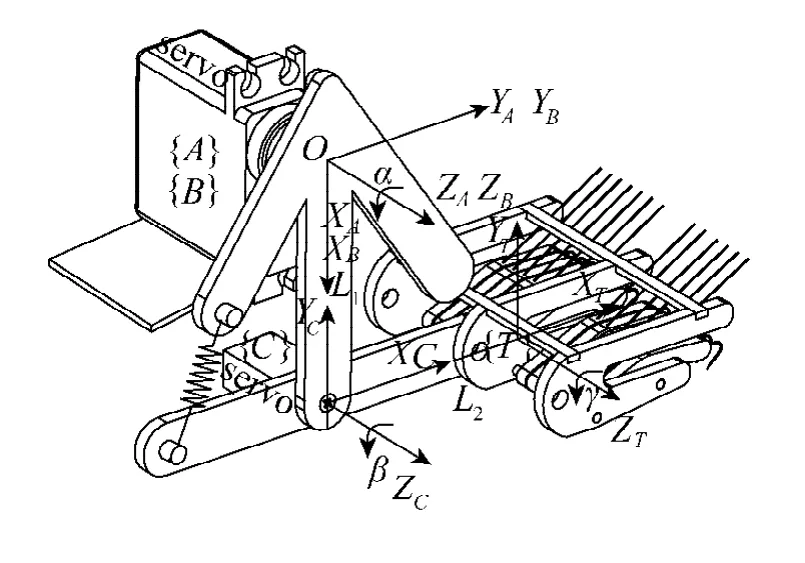
圖4 右前腿坐標系Fig.4 The coordinate system of right foreleg
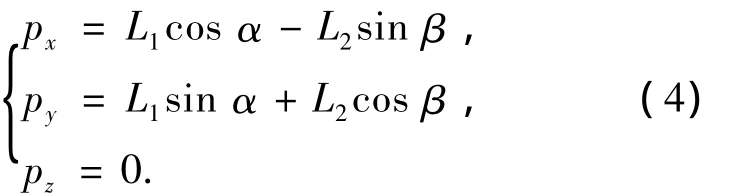
設電機A、B的轉角分別為α、β,基坐標系{A}的原點與坐標系{C}的原點距離為L1,坐標系{C}原點至{T}原點距離L2.暫定義末端執行器件(足端點)的位姿為矩陣{p,n,o,a},足端點 P 在基坐標系中的位置為0p=[pxpypz]T.通過連桿變換方程可得,末端執行器的坐標系{T}對基坐標系{A}的位姿變換矩陣為

由上述變換矩陣可以得到末端執行器件(爪心)在基坐標系{A}中的坐標為
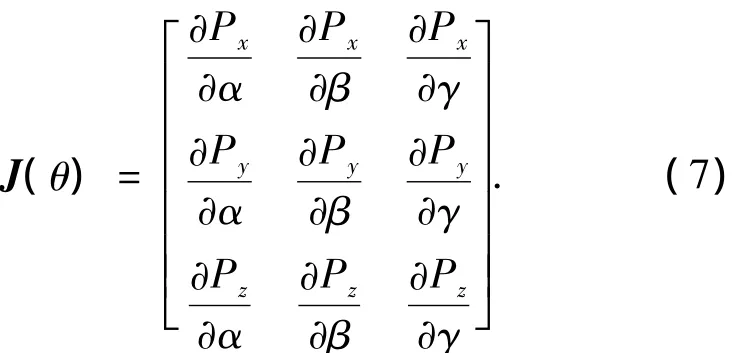
上面分析了腿部的微分運動,在此基礎上,建立機器人操作空間速度與關節操作空間速度間的線性映射關系,由此可得右前腿的雅可比矩陣.對右前足端點在基礎坐標系中的線速度P·進行分析.

令足端點運動方程為P(θ)代表操作空間P與關節空間θ之間的位移關系.將上式求導可得

4 柔性足部動力學模型建立與分析
4.1 足接觸模型
足部各足趾與壁面接觸時,由于單只足趾具有俯仰與伸縮自由度,足趾背部彈性鋼針可提供垂直壁面回復力,如圖5(a)所示,對此模型做進一步簡化,足尖簡化為一剛性桿觸頭,足趾簡化為質量—彈簧阻尼系統.設y方向的位移為給定值yi,足尖觸頭的水平位置與分界面的水平位置直接耦合.如圖5(b)所示.當足尖觸頭以線速度(x)碰觸粗糙壁面時,可得如下關系式:

式中:K為彈性系數,M、C為系統的質量和阻尼系數.
足尖觸頭與粗糙表面接觸時,此刻對足尖觸頭的切向回復力和垂直回復力進行分析,如圖5(b)所示,力Fn的方向垂直于觸頭接觸面的切線方向,切線方向的力通過向x軸進行微分,可得.其中力Fn為x和y方向的合力,即

x方向代表垂直方向回復力,y方向代表水平方向回復力.

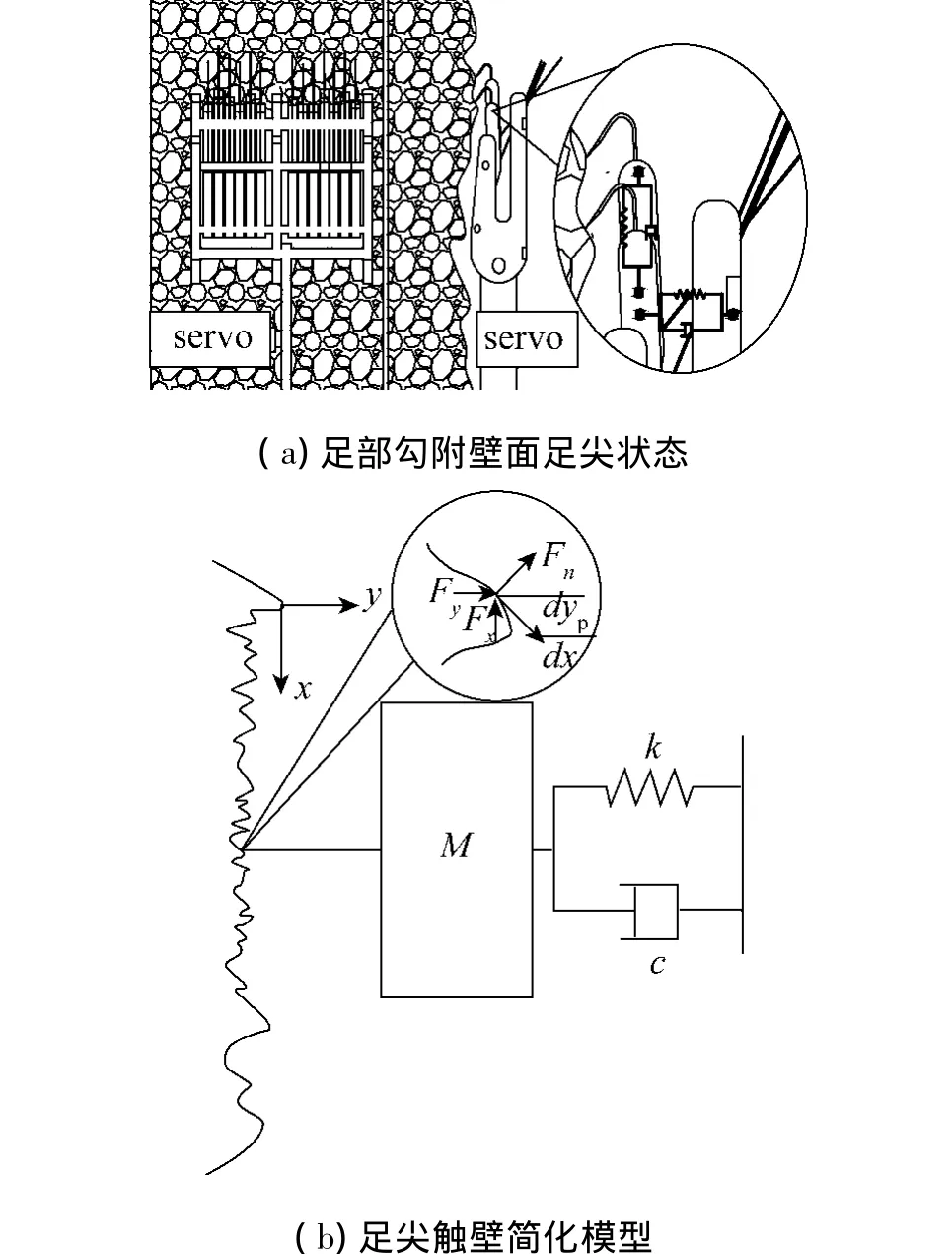
圖5 足部觸壁分析圖Fig.5 Analysis diagram of the foot touch the wall
經上式分析可得,當給定距離yi小于yp時,此時觸頭處于接觸目標物表面,所得垂直回復力為Fx,由此可得足尖以一定速度接觸壁面的實時回復力;當給定距離yi大于yp時,此時觸頭脫離目標物表面,此時接觸力為零.這樣就可以得出在接觸與下滑過程中,足尖觸頭在接觸和脫離瞬間的跳躍和起伏力的測量,從而控制腿部擺動角度和速度.
4.2 柔性足運動仿真分析
昆蟲足部的骨骼、筋腱和韌帶的結構非常復雜,要對其進行完全的模擬不僅十分困難,而且還會造成機器人足部結構過于龐大復雜,不利于機器人的攀爬性能和速度的提高.為此,從工程可實現角度出發,用一個均質的柔性鋼針來模擬昆蟲的足尖的彈性環節,并與剛性足趾組成柔性足,對其接觸階段的運動特性進行單獨的分析研究.
根據昆蟲生物結構,建立單柔性足觸壁分析模型[9],并假設觸壁階段足尖所受的垂直壁面的力可等效為作用在柔性鋼針反作用力.
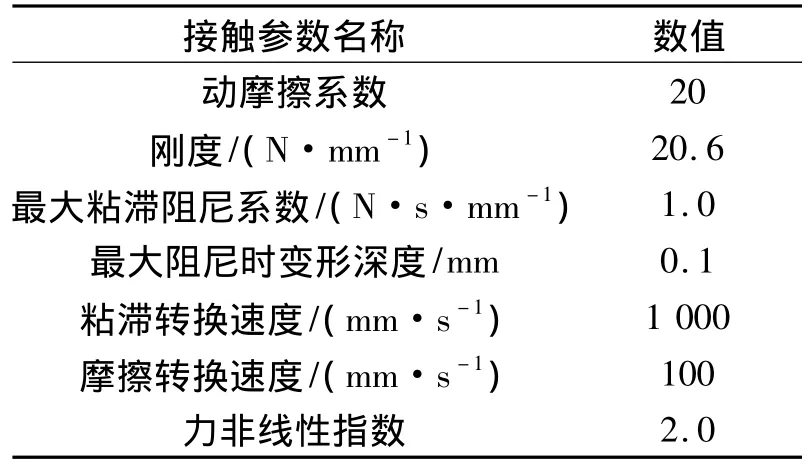
表1 足部仿真接觸屬性設置Table 1 The property settings of the foot contact
仿真中給機器人足部施加垂直于接觸面并且指向接觸面內部的預加載力,大小為10 N.足尖與壁面之間的接觸設置如表1所示.設置仿真參數,仿真時間為0.5 s,步長為200.仿真運行后,ADAMS/Solver模塊可自動形成機械系統模型動力學方程,提供動力學和運動學解算結果,然后再通過ADAMS/Post Processor后處理模塊對仿真后的結果數據進行處理,得出足尖點沿垂直于壁面方向的位移曲線,并能顯示仿真動畫.該壁面爬行機器人的足尖點在垂直壁面的方向上運動曲線如圖6所示.

圖6 足尖觸壁運動曲線Fig.6 Toes of foot touch the wall motion curves
仿真中,在垂直壁面的方向上,柔性足尖在觸壁階段會發生往復振動,彈性鋼針發生彈性變形,動能與彈性勢能隨其變形而相互轉化,最終處于穩定狀態.柔性足結構具有觸壁緩沖作用,對粗糙壁面具有柔性自適應功能,起伏過程中自動尋找牢靠的勾附點,起到模仿生物筋腱和韌帶的作用.
經仿真分析,此結構特點是足尖可抓住粗糙墻壁的表面,自適應柔性足趾可隨壁面的凹凸狀態自行調整,有效勾附在墻壁上,相對于傳統壁面機器人,它對壁面的適應性更強,爬行更穩定.
5 樣機與實驗
由于在攀爬過程中足尖需要承受較大的應力,故要求爬壁機器人樣機的選材具有較高的韌性和強度,同時具有較低的密度.本實驗采用3 mm環氧樹脂復合板作為樣機材料,并選用一臺50級減速直流電機作為動力源,采用6組舵機實現腿部的舉、放運動.由于機器人需要在高空壁面進行作業,因此采用紅外遙控發射和接受裝備對其進行控制.圖7給出了實驗過程中樣機攀爬粗糙墻壁實驗時的狀態圖.
通過實驗,驗證了本機構設計的可行性.在試驗中,本機構能攀爬水泥沙石粗糙墻壁,實驗過程為從1樓攀爬至4樓,再折返至1樓,如圖7所示,為機器人攀爬過程截圖,通過實驗效果可以看出,本機構具有良好的攀爬效果,達到了預期效果.攀爬過程中,不僅可以完成垂直上下的運動過程,還能實現斜向的攀爬,充分實現了越障壁障功能.

圖7 仿真模型及樣機實驗照片Fig.7 Model of simulation and prototype test photos
6 結論
通過仿真模型設計分析,及原理樣機進行的實驗,可得到如下結論:
1)根據仿生學原理,設計實現以平行四邊形為主體的移動結構,配以典型三角步態,實現了機器人壁面行走,通過對單腿進行運動學分析,得出足尖點的運動參數,驗證機器人步態及運動的穩定性和可行性.
2)通過對仿昆蟲足尖剛毛的足部設計進行模型簡化和動力學分析,得出足尖切入角度范圍與勾附成功率的關系式,簡化出足接觸模型,規劃出腿部運動角度的控制規律.
3)結合ADAMS仿真分析和實驗研究,驗證了粗糙壁面爬行機器人足部結構、主體結構設計的可行性,合理性.
[1]EMERSON SB,DIEHLD.Toe pad morphology and mechanisms of sticking in frogs[J].Biological Journalof the Linnean Society,1980,13(3):199-216.
[2]FEDERLEW,RIEHLEM,CURTISA SG,etal.An integrative study of insect adhesion:mechanics and wet adhesion of pretarsal pads in ants[J].Integrative and Comparative Biology,2002,42(6):1100-1106.
[3]周群,何斌,岳繼光.昆蟲足的吸附機制[J].昆蟲知識,2007,44(2):297-301.ZHOU Qun,HE Bin,YUE Jiguang.Adhesion mechanisms of insect legs[J].Chinese Bulletin of Entomology,2007,44(2):297-301.
[4]AUTUMN K,PEATTIE A.Mechanisms of adhesion in geckos[J].Integrative and Comparative Biology,2002,42(6):1081-1090.
[5]KESEL A B,MARTIN A,SEIDL T.Adhesion measurements on the attachment devices of the jumping spider Evarcha arcuata[J].The Journal of Experimental Biology,2003,206:2733-2738.
[6]陳東良,吳磊,王立權,等.鉤爪式爬壁機器人[P].中國:CN101049838A,2007-10-10.
[7]ASBECK A T,SANGBAE K,WILLIAM R.Scaling hard vertical surfaces with compliant micro spine arrays[J].The Journal of Experimental Biology,2001,204:3471-3481.
[8]COSTA M A,CUTKOSKY M R.Roughness perception of haptically displayed fractal surfaces.ASME 2000[R].Orlando:[s.l.],2000.
[9]陸佑方.柔性多體系統動力學[M].北京:高等教育出版社,1996:52-58.
[9]石先杰,史冬巖,鄧波,等.基于TRIZ理論的攀爬機器人創新設計[J].應用科技,2011,38(3):61-64.SHIXianjie,SHIDougyan,DENG Bo,et al.Innovative design of climbing robot based on TRIZ[J].Applied Science and Technology,2011,38(3):61-64.
猜你喜歡
現代畜牧科技(2021年9期)2021-10-13 06:39:14
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
當代經濟研究(2016年5期)2016-12-01 03:12:05
現代農業(2016年5期)2016-02-28 18:42:46
出版與印刷(2016年3期)2016-02-02 01:20:11
財經界(學術版)(2015年20期)2015-12-23 09:20:13
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
華北水利水電大學學報(社會科學版)(2014年3期)2014-04-16 04:38:31