帶有舵機特性的船舶航向自動舵DSC-MLP設計
2012-10-26 13:33:28劉程李鐵山陳納新
哈爾濱工程大學學報 2012年1期
劉程,李鐵山,陳納新
(1.大連海事大學 航海學院,遼寧大連116026;2.上海交通大學船舶海洋與建筑工程學院,上海200240;3.大連海事大學數學系,遼寧大連116026)
近年來,航運業迅速發展,對于船舶航行安全、節能、降低船員的勞動強度的要求日益增強,所以船舶航向控制問題得到了大家的關注.尤其是從70年代以來,各種控制技術不斷應用于航向控制,如自適應控制[1-2]、H∞控制[3-5]、魯棒控制[6-8]以及先進智能控制[9]等.然而,迄今為止,很多控制算法還不能應用于工程實際.究其原因主要是一方面,船舶動態具有高度非線性、長時滯、大慣性等特性,同時風、浪、流等外擾的隨機性以及航行工況(裝載、航速等)的頻繁變化使船舶運動數學模型呈現明顯的不確定性.這些特性使得很多控制算法不能適用;另一方面,一些控制算法本身由于算法復雜、計算負擔重,在線執行耗時明顯而限制了其在工程實踐中的應用.因此,研發易于工程實現的自動舵控制算法正成為目前船舶控制領域的一個研究熱點.
本文針對帶有舵機特性的非線性船舶航向控制系統,提出了一種計算量小、易于工程實現的自動舵控制算法.
利用Lyapunov方法證明了閉環系統的穩定性,并通過計算機仿真驗證了方法的有效性.
1 問題的提出
非線性船舶航向控制系統數學模型的舵角δ和航向φ的關系可以用下面的數學模型描述:

式中:K、T分別表示時間增益和時間常數,它們都是船舶前進速度和船長的函數.H(φ·)是φ·的非線性函數,可以近似表示為[10]

式中:ai(i=1,2,3,…)是實值常數.
由于船舶的舵機系統無法實現階躍操舵,忽略舵機特性將影響控制系統的性能品質[11].因此,從實際應用來看,為了獲得良好的航向控制性能,還應考慮舵機伺服系統的特性.船舶舵機的動力特性可以描述為

式中:δE為舵機發出的命令舵角,δ為實際舵角,KE為舵機控制增益,TE為舵機時間常數.
定義 x1=φ,x2=,x3= δ及 u= δE,由式(1)、(3)可得到包含舵機特性的非線性船舶航向控制系統模型:
式中:f2=-(1/T)H),g2=K/T,f3= - (1/TE),g3=KE/TE.
本文的目標是針對系統(4)設計一種簡單、計算量小的自適應模糊控制器使閉環系統的所有信號都有界,且使跟蹤誤差z1=x1(t)-yd(t)能夠任意小.
首先,對上述系統做如下假設:
假設1 控制增益gi(i=2,3)是嚴格正的或者負的,即滿足不等式0<bmin≤|gi|≤bmax,其中 bmin,bmax是上下界.不失一般性,假設0<bmin≤gi.
假設2 系統函數f2和f3是完全未知的.
假設3 參考信號yd(t)光滑有界且具有2階連續有界的導數,即存在一個正的常數B0,使得集合∏0∶B0}成立.
2 T-S模糊系統
一般來說,T-S型模糊系統可以按照以下K條模糊規則構造:

式中:aij(i=1,2,…,K;j=1,2,…,n)是未知常數,表示輸入模糊變量.采用乘積模糊推理機評估ANDS模糊規則,經過中心平均解模糊器去模糊化,T-S模糊系統的輸出可以表示為

式中:ξ(x)=[ξ1(x) ξ2(x) … ξK(x)],ξi(x)=)]稱為模糊基函數,(xj)稱為模糊隸屬度函數,矩陣
下面的引理1表明,T-S模糊模型可以做為通用函數逼近器,在任意的凸緊集上,以任意精度逼近任意光滑非線性函數[12].
引理1 對于任意給定的連續函數f(x),在論域U∈Rn內,?ε>0,存在一個如式(5)所示的T-S模糊系統x,Ax),使得下式成立:

式中:ε 表示逼近誤差[10].
3 控制設計
由于系統(4)是一個非匹配系統,可以采用后推方法(backstepping)進行設計.而傳統的后推方法在每一步都要對虛擬控制律進行重復求導,導致較高階虛擬控制律和最終控制器所含項隨著系統階數的增加爆炸性膨脹,導致計算膨脹,從而限制了這種方法在實際工程中的應用.而動態面控制(DSC)方法[13]能夠解決該問題.
現在將DSC思想融入后推方法,對系統(4)進行自適應模糊跟蹤控制設計.其遞歸設計過程包含3步.在每一步,設計虛擬控制量ai+1.最后,在第3步,構造實際控制律.下面將給出設計的簡要過程.
1)定義誤差變量z1=x1-yd,則

將x2看做式(6)的虛擬控制量,并取其理想值,即虛擬控制律α2如下:

式中:k1是正的設計常數.
現在借助DSC思想,引入新變量s2,令α2通過帶有時間常數η2的一階濾波器[14]:

2)定義誤差變量z2=x2-s2,則有

由于f2未知,采用T-S模糊系統(5)逼近,則有

然后可得

由于

類似地,選擇虛擬控制律α3如下:
式中:λ2=;k2、γ2、δ2是設計參數;、分別是λ2和θ2的估計值,其自適應律將在后面給出.
現在引入變量s3,令α3經過時間常數為η3的一階濾波器:

3)定義 z3=x3-s3,則有

類似地,f3可以近似為


類似地

現在來選擇控制輸入u:
式中:λ3=;k3、γ3、δ3是正常數分別是λ3和θ3的估計值.
定理1 考慮由式(4)、(7)、(13)、(19)和(20)組成的閉環系統,如果給定一個正數p2,所有初步條件滿足,(i=1,2,3).則存在 k、γ 、δ、iiiσi1、σi2、Γi1和 Γi2使得閉環系統的解有界.并且,對于任意給定的一個正數μ1>0,可以通過調整控制器參數而使得跟蹤誤差充分小,即使得z1=y(t)-yd(t)滿足|z1(t)|≤μ1.
證明 (略).
首先,定義一個新的誤差變量:

式中:B2(·)是式(22)右邊的剩余項,是一個連續函數.類似地,有
同樣,B3也是一個連續函數.
考慮到xi+1=zi+1+si+1和 si+1=yi+1+αi+1,整個誤差系統可以表示為
將αi+1(i=1,2)和控制輸入u代入式(24)得

考慮如下Lyapunov預選函數:

注意到

由于 z2z1≤(z2/2)2+z21,y2z1≤(y2/2)2+z21,同時注= -y/n意到ii(i=2,3),

則式(27)變為


現在考察式(33)右邊最后2項的屬性.先考察Bi+1(i=1,2)的屬性.
由于集合∏0∈R3和∏i∈)(其中 Nj是的維數)都是緊的,因此∏0×∏i∈i∈)也是緊的.因而|Bi+1|在∏0×∏i上具有一個最大值M[11].

現在選取 σi1/2λmax(bmin)= σi2/2λmaxα0為一個正的常數.如果選擇γ<1,經過推導,則式(34)變為

由上文可見,閉環系統的所有解都是有界的.并且,對于任意的 μ1>(ρ/α0)1/2,存在一個 T >0,使得對于所有的t≥t0+T,都有‖z1(t)≤μi‖成立.這是因為通過選取適當的設計參數 k1、γ1、δ1、η2、σ11、σ12、Γ11和Γ12,可以使得(ρ/α0)1/2任意小.從而使得跟蹤誤差z1=y(t)-yd(t)盡可能地小.定理1證畢.
4 計算機仿真算例
在這部分,以大連海事大學遠洋教學實習船“育龍”號進行仿真.其船型參數見文獻[6].跟蹤信號選為能夠代表某一實際性能要求的模型:

式中:φm表征了船舶航向的理想系統性能,而φr(t)是命令輸入信號,其值從0到30°變化,以300 s為周期.
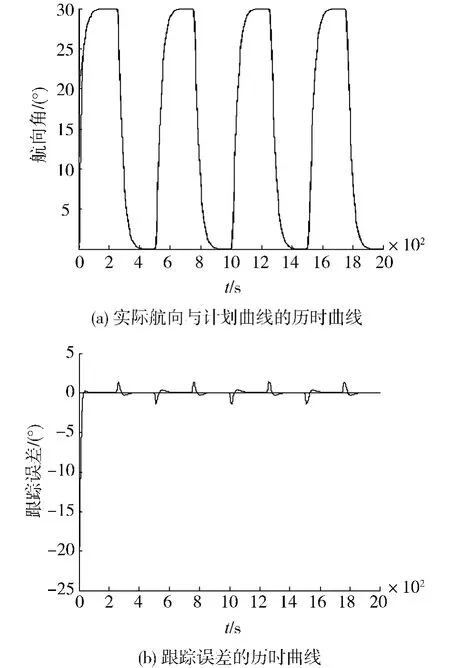
圖1 航向跟蹤控制與跟蹤誤差的變化曲線Fig.1 Curves of course-tracking control and tracking error
在仿真中,對于系統(4)中的每一個變量定義5個模糊集,分別標記為(NL)、(NM)、(ZE)、(PM)、(PL),用以下隸屬函數描述:
選取設計參數為 k1=0.1,k2=40,k3=5,Γi1=Γi2=2,σi1=σi2=0.001,==0,γi=0.5(i=2,3),δ2=δ3=100.初始條件選取為:φm的初始狀態為 20°,x1、x2、x3的初始狀態都為零.仿真結果見圖1、2.
圖1表明航向跟蹤效果理想且跟蹤誤差有界,圖2表明輸入舵角及舵角變化率都滿足性能要求.
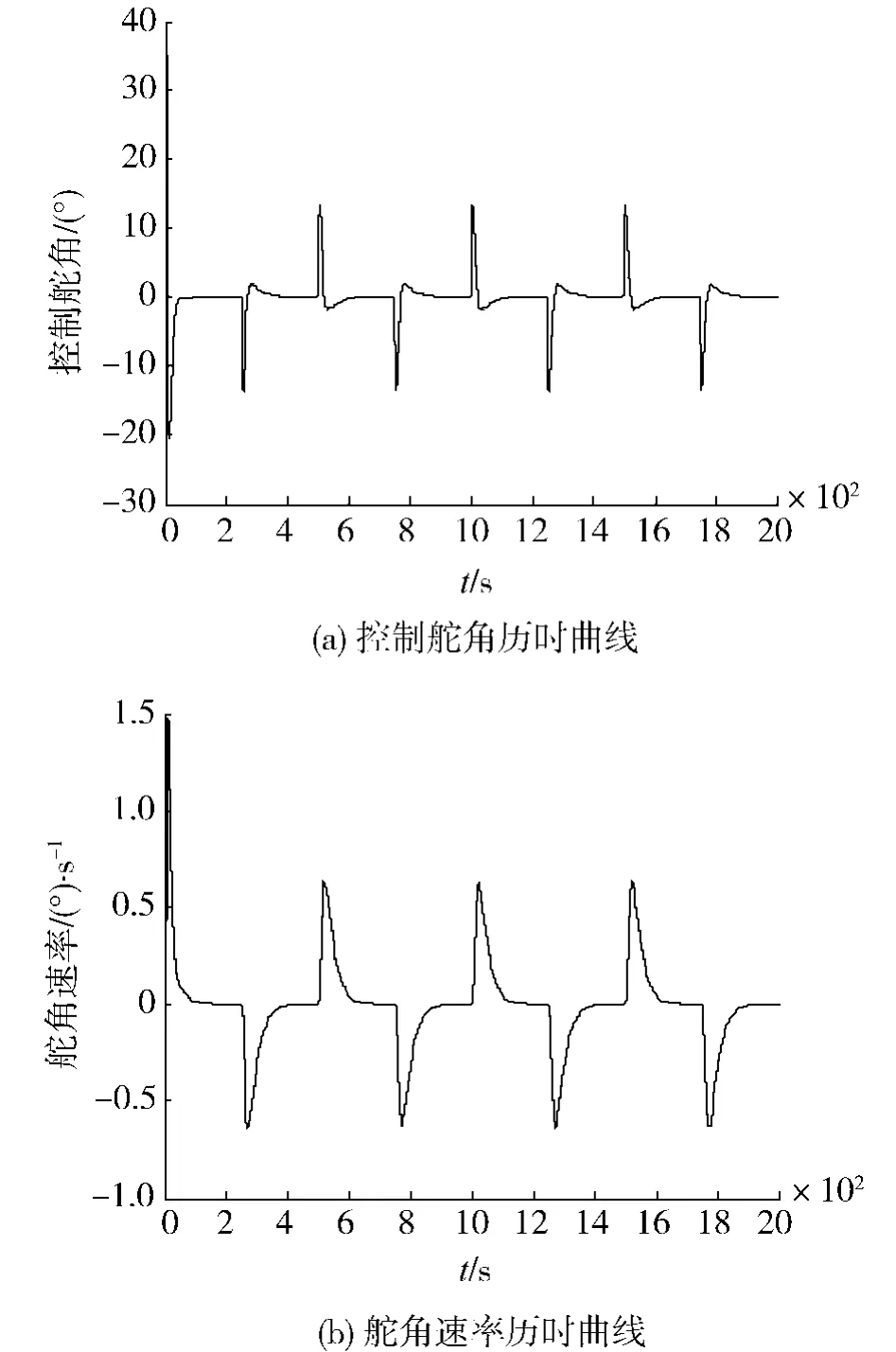
圖2 控制舵角和舵角速率變化曲線Fig.2 Curves of control rudder angle and rudder angle rate
5 結束語
論文研究了船舶航向非線性系統的自適應跟蹤控制問題.結合DSC和MLP技術,提出了一種自適應模糊控制算法,能夠同時解決“維數災難”和“計算膨脹”問題,學習參數少,計算量大為減少,易于在工程中實現.計算機仿真結果證明了算法的有效性.這種方法在工程實踐中具有潛在的應用和推廣價值.
[1]AMERONGEN JV.Adaptive steering of ships—amodel reference approach[J].Automatica,1984,20(1):3-14.
[2]DU J L,GUO C.Nonlinear adaptive design for coursetracking control of ship withouta prioriknowledge of control gain[J].Journal of Control Theory & Applications,2005,22(2):315-320.
[3]賈欣樂,張顯庫.控制器應用于船舶自動舵[J].控制與決策,1995,10(3):250-254.JIA Xinle,ZHANG Xianku.Controllers applied to autopilot for ships[J].Control and Decision,1995,10(3):250-254.
[4]LIU S,YU P.Application of control to ship steering system[J].Journal of Marine Science and Application,2006(1):5-9.
[5]CHENG Xiangqin,QU Jingyuan,YAN Zheping,et al.H∞robust fault-tolerant controller design for an autonomous underwater vehicle's navigation control system[J].Journal of Marine science and Application,2010,9(1):87-93.
[6]羅偉林,鄒早建,李鐵山.船舶航向非線性系統魯棒跟蹤控制[J].控制理論與應用,2009,26(8):893-895.LUO Weilin,ZOU Zaojian,LI Tieshan.Robust tracking control of nonlinear ship steering[J].Journal of Control Theory and Applications,2009,26(8):893-895.
[7]卜仁祥,劉正江,李鐵山.迭代滑模增量反饋及在船舶航向控制中的應用[J].哈爾濱工程大學學報,2007,28(3):268-272.BU Renxiang,LIU Zhengjiang,LITieshan.Iterative sliding mode based increment feedback controland its application to ship autopilot[J].Journal of Harbin Engineering University,2007,28(3):268-272.
[8]YUAN Lei,WU Hansong.Terminal slidingmode fuzzy control based onmultiple sliding surface for nonlinear ship autopilot system[J].Journal of Marine Science and Application,2010,9(4):425-430.
[9]HU JQ,LIT S.Design of GA-based fuzzy control for ship steering[C]// Proceedings of WCICA, Dalian,China,2006.
[10]賈欣樂,楊鹽生.船舶運動數學模型-機理建模與辨識建模[M].大連:大連海事大學出版社,1999.
[11]鄭云峰,楊鹽生,李鐵山.帶有執行機構的船舶航向控制反饋線性化設計[J].大連海事大學學報,2004,30(3):14-17.ZHENG Yunfeng,YANG Yansheng,LI Tieshan.Inputstate linearization based ship's course keeping controller designs[J].Journal of Dalian Maritime University,2004,30(3):14-17.
[12]YANG Y S,ZHOU C J,LIT S.Small gainmethod for adaptive robust fuzzy control of a class of nonlinear systems[C]//Proc of the 2003 IEEE Int Symp on Intel Control,Houston,USA,2003:40-45.
[13]WANG D,HUANG J.Neural network-based adaptive dynamic surface control for a class of uncertain nonlinear systems in strict-feedback form[J].IEEE Transactions on Neural Networks,2005,16(1):195-202.
[14]LITS,WANG D ,LIW.A novel adaptive NN control for a class of strict-feedback nonlinear systems[C]//2009 A-merican Control Conference,St.Louis,USA,2009:2946-2951.
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
工業設計(2022年8期)2022-09-09 07:43:20
船舶(2021年4期)2021-09-07 17:32:22
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16